
Navigational Aids
Navigational Aids
You might also like
- AW139 Training Notes b2Document1,958 pagesAW139 Training Notes b2pbubs94% (34)
- Understand Lido ChartsDocument106 pagesUnderstand Lido ChartsВлад Пряников75% (4)
- Cessna Sovereign Primus-Epic (Honeywell) - Forward FitDocument6 pagesCessna Sovereign Primus-Epic (Honeywell) - Forward Fitgambit_zeta67% (3)
- Navedtra 14339Document54 pagesNavedtra 14339Blaze123xNo ratings yet
- Basic Radar Principles and General CharacteristicsDocument3 pagesBasic Radar Principles and General CharacteristicsankushbhasinNo ratings yet
- Eppo 01-2020Document23 pagesEppo 01-2020Tweed3A100% (1)
- A318/A319/A320/A321 (CFM56) : General Familiarization CourseDocument146 pagesA318/A319/A320/A321 (CFM56) : General Familiarization CourseRaby Abidi100% (1)
- Navigational-Aids PDFDocument121 pagesNavigational-Aids PDFBianca QuizonNo ratings yet
- Navigational AidsDocument171 pagesNavigational AidsKairos100% (3)
- Ee455 Chapter6 Pulsed Radar 1668493538Document34 pagesEe455 Chapter6 Pulsed Radar 1668493538Enes AktaşNo ratings yet
- Radar NotesDocument33 pagesRadar Notesrica_esclada100% (1)
- Radar & Sar Remote SensingDocument11 pagesRadar & Sar Remote SensingParag Jyoti DuttaNo ratings yet
- Unit 1Document43 pagesUnit 1Tammaneni NavyaNo ratings yet
- Navigational Aids Questions: AnswersDocument15 pagesNavigational Aids Questions: AnswersDenaiya Watton LeehNo ratings yet
- LEC2 - EM Wave Reflection, The RCS, Methods of Coordinates Measurement (Erasmus)Document32 pagesLEC2 - EM Wave Reflection, The RCS, Methods of Coordinates Measurement (Erasmus)Eduard IbanisteanuNo ratings yet
- Surveillance Systems Course OutlineDocument36 pagesSurveillance Systems Course OutlinemogenoordiinNo ratings yet
- RadarDocument17 pagesRadarAnindya Mukul100% (2)
- Chapter 1: Introduction: The Name Radar Stands For Radio Detection and RangingDocument37 pagesChapter 1: Introduction: The Name Radar Stands For Radio Detection and RangingrajeevNo ratings yet
- Report File: Hf/Ndb-Bijawasan AsmgcsDocument18 pagesReport File: Hf/Ndb-Bijawasan AsmgcsArshilgeniNo ratings yet
- Notes 1 Basics of RadarDocument18 pagesNotes 1 Basics of RadarPranava K BhatNo ratings yet
- Project ProposalDocument19 pagesProject ProposalSougat Dhungel100% (2)
- Unit-I: Introduction To RadarDocument17 pagesUnit-I: Introduction To Radarraza sulemanNo ratings yet
- Radar: AVTE 326Document53 pagesRadar: AVTE 326Fitzpatrick Cunanan100% (1)
- Radar Theory and Principles Part 1 - SlidesDocument143 pagesRadar Theory and Principles Part 1 - SlidesAndi Mario MbpNo ratings yet
- What Is Radar and How Is It UsedDocument73 pagesWhat Is Radar and How Is It UsedAhmed ShahNo ratings yet
- Radar Unit1Document10 pagesRadar Unit1Mummana Mohan ShankarNo ratings yet
- Unit-5 RADARs PptsDocument146 pagesUnit-5 RADARs PptsRam KalvaNo ratings yet
- Radar TheoryDocument51 pagesRadar TheoryMuhammad ShoaibNo ratings yet
- An Introduction To Radar Communication System: Quaid-e-Awam University of Engineering & Technology NawabshahDocument36 pagesAn Introduction To Radar Communication System: Quaid-e-Awam University of Engineering & Technology NawabshahHaseeb AhmedNo ratings yet
- Topic 4 Radar FundamentalsDocument127 pagesTopic 4 Radar FundamentalsMuhammad Haziq afnan Bin Mohd SarNo ratings yet
- Radar Manual2019Document24 pagesRadar Manual2019UNCLE STATIONARYNo ratings yet
- Types of Anechoic Chamber 1.rectangular 2.taperedDocument14 pagesTypes of Anechoic Chamber 1.rectangular 2.taperedabhilasha-tiwari-7650No ratings yet
- Unit 7 Radar: StructureDocument28 pagesUnit 7 Radar: StructureParminder singh parmarNo ratings yet
- AJB 30203: Radar Principles: Assoc. Prof. Ts. Dr. Harlisya Harun Harlisya@unikl - Edu.myDocument39 pagesAJB 30203: Radar Principles: Assoc. Prof. Ts. Dr. Harlisya Harun Harlisya@unikl - Edu.myMuhammad HaziqNo ratings yet
- Radar & NavigationDocument57 pagesRadar & NavigationAnandu KrishnaNo ratings yet
- Rs Notes Pdf1Document248 pagesRs Notes Pdf1himeshemraan100% (1)
- EE Unit-4Document15 pagesEE Unit-4Srishabh DeoNo ratings yet
- Bridge Equipment: Capt. S. Swaroop Nautical Faculty B. SC Nautical Science Semester - VDocument48 pagesBridge Equipment: Capt. S. Swaroop Nautical Faculty B. SC Nautical Science Semester - VMayankNo ratings yet
- Semester Project Presentation: Electronics Based DevicesDocument34 pagesSemester Project Presentation: Electronics Based DevicesNabil AbdullahNo ratings yet
- B.,Eqpmnt Sem V-23Document299 pagesB.,Eqpmnt Sem V-23PrasathNo ratings yet
- Radar EquationDocument18 pagesRadar EquationzakiNo ratings yet
- Group 5&6 Radar Systems - NaviDocument9 pagesGroup 5&6 Radar Systems - NaviDaniel TamisenNo ratings yet
- Concept of Microwave Remote SensingDocument53 pagesConcept of Microwave Remote Sensingsg.gis279No ratings yet
- Radar: Basic Principle-Radar Is ADocument5 pagesRadar: Basic Principle-Radar Is AkdchourasiaNo ratings yet
- An Introduction To Radar: Long orDocument2 pagesAn Introduction To Radar: Long orOmbasNo ratings yet
- 23 2 ET V1 S1 - Radar Basics PDFDocument74 pages23 2 ET V1 S1 - Radar Basics PDFShailendra SinghNo ratings yet
- T, Then The Range May Be Determined by The SimpleDocument5 pagesT, Then The Range May Be Determined by The SimpleSathiya NarayananNo ratings yet
- Synthetic Aperture Radar Systems - Laboratory HandbookDocument58 pagesSynthetic Aperture Radar Systems - Laboratory HandbookMirel PaunNo ratings yet
- RadarDocument32 pagesRadarpmbrahvee115No ratings yet
- Rna MaterialDocument147 pagesRna MaterialShivani SaxenaNo ratings yet
- Radar and Sensor Systems Basic Principle of OperationDocument16 pagesRadar and Sensor Systems Basic Principle of OperationJeff Mirondo KibalyaNo ratings yet
- Radar Fundamentals 2Document56 pagesRadar Fundamentals 2Chandan MishraNo ratings yet
- RadarDocument12 pagesRadarghunnu0777No ratings yet
- Power Point Presentation RadarDocument22 pagesPower Point Presentation Radarathar malikNo ratings yet
- Introduction To Radar: SupervisorDocument35 pagesIntroduction To Radar: Supervisorsree479100% (1)
- Radar ArpaDocument35 pagesRadar Arpaaaroneguia1No ratings yet
- Radar Presentation 01Document30 pagesRadar Presentation 01cozdim100% (5)
- Implementation of Range Compression For Synthetic Aperture Radar Using Virtex-Ii XC2V3000Document26 pagesImplementation of Range Compression For Synthetic Aperture Radar Using Virtex-Ii XC2V3000Sunil PillaiNo ratings yet
- MODULE 1.1 PPT Radar EngineeringDocument6 pagesMODULE 1.1 PPT Radar EngineeringNausheen RainaNo ratings yet
- Radar Theory and Principles - Notes To SlidesDocument14 pagesRadar Theory and Principles - Notes To SlidesSii Olog-olog PlonkNo ratings yet
- Radar (Electronics) - Britannica Online Encyclopedia PDFDocument12 pagesRadar (Electronics) - Britannica Online Encyclopedia PDFJitendra PanwarNo ratings yet
- An Electronic System That Uses Reflected Electromagnetic Energy To Detect The Presence and Position of Objects Invisible To The EyeDocument3 pagesAn Electronic System That Uses Reflected Electromagnetic Energy To Detect The Presence and Position of Objects Invisible To The EyeTensaiNo ratings yet
- Multispectral Imaging: Unlocking the Spectrum: Advancements in Computer VisionFrom EverandMultispectral Imaging: Unlocking the Spectrum: Advancements in Computer VisionNo ratings yet
- Nvsu FR Icd 02Document7 pagesNvsu FR Icd 02jimmyboyjrNo ratings yet
- Review 1 Coms Quiz #6Document71 pagesReview 1 Coms Quiz #6jimmyboyjrNo ratings yet
- Navigational AidsDocument1 pageNavigational AidsjimmyboyjrNo ratings yet
- Getting Started Matlab Lesson 1Document6 pagesGetting Started Matlab Lesson 1jimmyboyjrNo ratings yet
- Review 2018 Comms Quiz 1Document2 pagesReview 2018 Comms Quiz 1jimmyboyjrNo ratings yet
- Soil Moisture Sensor Technical Manual PDFDocument4 pagesSoil Moisture Sensor Technical Manual PDFjimmyboyjrNo ratings yet
- DLL All Subjects 2 q4 w1 d1Document8 pagesDLL All Subjects 2 q4 w1 d1jimmyboyjrNo ratings yet
- Selecting A Research TopicDocument1 pageSelecting A Research TopicjimmyboyjrNo ratings yet
- Objective:: Generation of Basic Signals Using MatlabDocument2 pagesObjective:: Generation of Basic Signals Using MatlabjimmyboyjrNo ratings yet
- Methods of ResearchDocument43 pagesMethods of ResearchjimmyboyjrNo ratings yet
- DLL All Subjects 2 q4 w1 d2Document9 pagesDLL All Subjects 2 q4 w1 d2jimmyboyjrNo ratings yet
- Electronic Devices and Circuits: Engr. Jimmy Carter B. Nilo, RECE August 2018Document17 pagesElectronic Devices and Circuits: Engr. Jimmy Carter B. Nilo, RECE August 2018jimmyboyjrNo ratings yet
- Kindergarten DLL Week 30Document4 pagesKindergarten DLL Week 30jimmyboyjr100% (1)
- Basic Computer TroubleshootingDocument28 pagesBasic Computer TroubleshootingjimmyboyjrNo ratings yet
- Lec 1Document35 pagesLec 1jimmyboyjrNo ratings yet
- DLL All Subjects 2 q4 w1 d3Document8 pagesDLL All Subjects 2 q4 w1 d3jimmyboyjrNo ratings yet
- Work Instruction: Verification of Analog Multitester (VOM)Document2 pagesWork Instruction: Verification of Analog Multitester (VOM)jimmyboyjrNo ratings yet
- Biag Ni Lam-Ang (Summary)Document3 pagesBiag Ni Lam-Ang (Summary)jimmyboyjrNo ratings yet
- 2n3055 Collector Characteristic CurveDocument3 pages2n3055 Collector Characteristic CurvejimmyboyjrNo ratings yet
- Research Design: Prepared By: Bimago, Jerome D. Bucsan, Danny Boy E. Bumanghat, Allen Bryan D. Bondoc, Jomar TDocument8 pagesResearch Design: Prepared By: Bimago, Jerome D. Bucsan, Danny Boy E. Bumanghat, Allen Bryan D. Bondoc, Jomar TjimmyboyjrNo ratings yet
- Correlation Survey and Longitudinal Survey Reporters Jim Aquino Jeftee Basatan Janel Biete Sharewin BaluddaDocument12 pagesCorrelation Survey and Longitudinal Survey Reporters Jim Aquino Jeftee Basatan Janel Biete Sharewin BaluddajimmyboyjrNo ratings yet
- The NBC 461 Guidelines For CceDocument25 pagesThe NBC 461 Guidelines For CcejimmyboyjrNo ratings yet
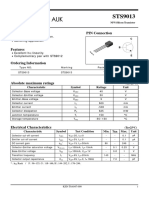
- 9013Document4 pages9013jimmyboyjrNo ratings yet
- VHHH Jeppesen ChartDocument94 pagesVHHH Jeppesen ChartTony Wong0% (1)
- Airports Authority of India (Aai) Training Report PDFDocument44 pagesAirports Authority of India (Aai) Training Report PDFpouninguang kameiNo ratings yet
- France PBN and GNSS StrategyDocument28 pagesFrance PBN and GNSS StrategyDmitriy MatenchookNo ratings yet
- C-141C Dash 1 005 1 - 151-200Document52 pagesC-141C Dash 1 005 1 - 151-200bkaplan452No ratings yet
- Garmin GNS 530 MANUAL PDFDocument47 pagesGarmin GNS 530 MANUAL PDFjozoce100% (1)
- B787 Communications OKDocument101 pagesB787 Communications OKابن كتاب ساميNo ratings yet
- CLASS TEST 01 Module 13Document1 pageCLASS TEST 01 Module 13Pravin HandeNo ratings yet
- Combitest419Document4 pagesCombitest419cipriancordeaNo ratings yet
- Jeppview For Windows: List of Pages in This Trip KitDocument16 pagesJeppview For Windows: List of Pages in This Trip KitRichard RiveraNo ratings yet
- Abreviations and Acronyms: Abbreviation DescriptionDocument13 pagesAbreviations and Acronyms: Abbreviation DescriptionrajNo ratings yet
- Sbgrkmia PDF 1627683240Document60 pagesSbgrkmia PDF 1627683240gamer p3p3gamerNo ratings yet
- Ils Concept Rev2Document180 pagesIls Concept Rev2Basu Dev AryalNo ratings yet
- Basis of Design ReportDocument49 pagesBasis of Design ReportshaggysamNo ratings yet
- Sistemi Ils (Instrument Landing Systems) E Mls (Microwave Landing Systems)Document44 pagesSistemi Ils (Instrument Landing Systems) E Mls (Microwave Landing Systems)Puneetha MadhuNo ratings yet
- DakarDocument19 pagesDakaroussamaborjNo ratings yet
- MMMX PDFDocument12 pagesMMMX PDFFelipe Valverde ChavezNo ratings yet
- Kdenkphl PDF 1708701535Document26 pagesKdenkphl PDF 1708701535bielpwkNo ratings yet
- Isi-00.00.00228 23may2018Document135 pagesIsi-00.00.00228 23may2018Do Gyi50% (2)
- Creative Flying TechniquesDocument16 pagesCreative Flying TechniquesAntonio PereiraNo ratings yet
- Met How Valley State Airport Final Alps Cope of WorkDocument12 pagesMet How Valley State Airport Final Alps Cope of WorkBrulin GJNo ratings yet
- ECS Avionics RF Assemblies: High Performance / Proven Reliability Key FeaturesDocument4 pagesECS Avionics RF Assemblies: High Performance / Proven Reliability Key FeaturesrafiNo ratings yet
- Ki 825 ManualDocument63 pagesKi 825 ManualTomas Kyso KyselicaNo ratings yet
- Aerodrome Op Min EASADocument16 pagesAerodrome Op Min EASAjaved iqbalNo ratings yet
- F 16 Landing TutorialDocument21 pagesF 16 Landing TutorialzenoxianNo ratings yet
- d8f f2 (July2015)Document26 pagesd8f f2 (July2015)dushroxNo ratings yet













































































































Download as pptx, pdf, or txt
You might also like
- AW139 Training Notes b2Document1,958 pagesAW139 Training Notes b2pbubs94% (34)
- Understand Lido ChartsDocument106 pagesUnderstand Lido ChartsВлад Пряников75% (4)
- Cessna Sovereign Primus-Epic (Honeywell) - Forward FitDocument6 pagesCessna Sovereign Primus-Epic (Honeywell) - Forward Fitgambit_zeta67% (3)
- Navedtra 14339Document54 pagesNavedtra 14339Blaze123xNo ratings yet
- Basic Radar Principles and General CharacteristicsDocument3 pagesBasic Radar Principles and General CharacteristicsankushbhasinNo ratings yet
- Eppo 01-2020Document23 pagesEppo 01-2020Tweed3A100% (1)
- A318/A319/A320/A321 (CFM56) : General Familiarization CourseDocument146 pagesA318/A319/A320/A321 (CFM56) : General Familiarization CourseRaby Abidi100% (1)
- Navigational-Aids PDFDocument121 pagesNavigational-Aids PDFBianca QuizonNo ratings yet
- Navigational AidsDocument171 pagesNavigational AidsKairos100% (3)
- Ee455 Chapter6 Pulsed Radar 1668493538Document34 pagesEe455 Chapter6 Pulsed Radar 1668493538Enes AktaşNo ratings yet
- Radar NotesDocument33 pagesRadar Notesrica_esclada100% (1)
- Radar & Sar Remote SensingDocument11 pagesRadar & Sar Remote SensingParag Jyoti DuttaNo ratings yet
- Unit 1Document43 pagesUnit 1Tammaneni NavyaNo ratings yet
- Navigational Aids Questions: AnswersDocument15 pagesNavigational Aids Questions: AnswersDenaiya Watton LeehNo ratings yet
- LEC2 - EM Wave Reflection, The RCS, Methods of Coordinates Measurement (Erasmus)Document32 pagesLEC2 - EM Wave Reflection, The RCS, Methods of Coordinates Measurement (Erasmus)Eduard IbanisteanuNo ratings yet
- Surveillance Systems Course OutlineDocument36 pagesSurveillance Systems Course OutlinemogenoordiinNo ratings yet
- RadarDocument17 pagesRadarAnindya Mukul100% (2)
- Chapter 1: Introduction: The Name Radar Stands For Radio Detection and RangingDocument37 pagesChapter 1: Introduction: The Name Radar Stands For Radio Detection and RangingrajeevNo ratings yet
- Report File: Hf/Ndb-Bijawasan AsmgcsDocument18 pagesReport File: Hf/Ndb-Bijawasan AsmgcsArshilgeniNo ratings yet
- Notes 1 Basics of RadarDocument18 pagesNotes 1 Basics of RadarPranava K BhatNo ratings yet
- Project ProposalDocument19 pagesProject ProposalSougat Dhungel100% (2)
- Unit-I: Introduction To RadarDocument17 pagesUnit-I: Introduction To Radarraza sulemanNo ratings yet
- Radar: AVTE 326Document53 pagesRadar: AVTE 326Fitzpatrick Cunanan100% (1)
- Radar Theory and Principles Part 1 - SlidesDocument143 pagesRadar Theory and Principles Part 1 - SlidesAndi Mario MbpNo ratings yet
- What Is Radar and How Is It UsedDocument73 pagesWhat Is Radar and How Is It UsedAhmed ShahNo ratings yet
- Radar Unit1Document10 pagesRadar Unit1Mummana Mohan ShankarNo ratings yet
- Unit-5 RADARs PptsDocument146 pagesUnit-5 RADARs PptsRam KalvaNo ratings yet
- Radar TheoryDocument51 pagesRadar TheoryMuhammad ShoaibNo ratings yet
- An Introduction To Radar Communication System: Quaid-e-Awam University of Engineering & Technology NawabshahDocument36 pagesAn Introduction To Radar Communication System: Quaid-e-Awam University of Engineering & Technology NawabshahHaseeb AhmedNo ratings yet
- Topic 4 Radar FundamentalsDocument127 pagesTopic 4 Radar FundamentalsMuhammad Haziq afnan Bin Mohd SarNo ratings yet
- Radar Manual2019Document24 pagesRadar Manual2019UNCLE STATIONARYNo ratings yet
- Types of Anechoic Chamber 1.rectangular 2.taperedDocument14 pagesTypes of Anechoic Chamber 1.rectangular 2.taperedabhilasha-tiwari-7650No ratings yet
- Unit 7 Radar: StructureDocument28 pagesUnit 7 Radar: StructureParminder singh parmarNo ratings yet
- AJB 30203: Radar Principles: Assoc. Prof. Ts. Dr. Harlisya Harun Harlisya@unikl - Edu.myDocument39 pagesAJB 30203: Radar Principles: Assoc. Prof. Ts. Dr. Harlisya Harun Harlisya@unikl - Edu.myMuhammad HaziqNo ratings yet
- Radar & NavigationDocument57 pagesRadar & NavigationAnandu KrishnaNo ratings yet
- Rs Notes Pdf1Document248 pagesRs Notes Pdf1himeshemraan100% (1)
- EE Unit-4Document15 pagesEE Unit-4Srishabh DeoNo ratings yet
- Bridge Equipment: Capt. S. Swaroop Nautical Faculty B. SC Nautical Science Semester - VDocument48 pagesBridge Equipment: Capt. S. Swaroop Nautical Faculty B. SC Nautical Science Semester - VMayankNo ratings yet
- Semester Project Presentation: Electronics Based DevicesDocument34 pagesSemester Project Presentation: Electronics Based DevicesNabil AbdullahNo ratings yet
- B.,Eqpmnt Sem V-23Document299 pagesB.,Eqpmnt Sem V-23PrasathNo ratings yet
- Radar EquationDocument18 pagesRadar EquationzakiNo ratings yet
- Group 5&6 Radar Systems - NaviDocument9 pagesGroup 5&6 Radar Systems - NaviDaniel TamisenNo ratings yet
- Concept of Microwave Remote SensingDocument53 pagesConcept of Microwave Remote Sensingsg.gis279No ratings yet
- Radar: Basic Principle-Radar Is ADocument5 pagesRadar: Basic Principle-Radar Is AkdchourasiaNo ratings yet
- An Introduction To Radar: Long orDocument2 pagesAn Introduction To Radar: Long orOmbasNo ratings yet
- 23 2 ET V1 S1 - Radar Basics PDFDocument74 pages23 2 ET V1 S1 - Radar Basics PDFShailendra SinghNo ratings yet
- T, Then The Range May Be Determined by The SimpleDocument5 pagesT, Then The Range May Be Determined by The SimpleSathiya NarayananNo ratings yet
- Synthetic Aperture Radar Systems - Laboratory HandbookDocument58 pagesSynthetic Aperture Radar Systems - Laboratory HandbookMirel PaunNo ratings yet
- RadarDocument32 pagesRadarpmbrahvee115No ratings yet
- Rna MaterialDocument147 pagesRna MaterialShivani SaxenaNo ratings yet
- Radar and Sensor Systems Basic Principle of OperationDocument16 pagesRadar and Sensor Systems Basic Principle of OperationJeff Mirondo KibalyaNo ratings yet
- Radar Fundamentals 2Document56 pagesRadar Fundamentals 2Chandan MishraNo ratings yet
- RadarDocument12 pagesRadarghunnu0777No ratings yet
- Power Point Presentation RadarDocument22 pagesPower Point Presentation Radarathar malikNo ratings yet
- Introduction To Radar: SupervisorDocument35 pagesIntroduction To Radar: Supervisorsree479100% (1)
- Radar ArpaDocument35 pagesRadar Arpaaaroneguia1No ratings yet
- Radar Presentation 01Document30 pagesRadar Presentation 01cozdim100% (5)
- Implementation of Range Compression For Synthetic Aperture Radar Using Virtex-Ii XC2V3000Document26 pagesImplementation of Range Compression For Synthetic Aperture Radar Using Virtex-Ii XC2V3000Sunil PillaiNo ratings yet
- MODULE 1.1 PPT Radar EngineeringDocument6 pagesMODULE 1.1 PPT Radar EngineeringNausheen RainaNo ratings yet
- Radar Theory and Principles - Notes To SlidesDocument14 pagesRadar Theory and Principles - Notes To SlidesSii Olog-olog PlonkNo ratings yet
- Radar (Electronics) - Britannica Online Encyclopedia PDFDocument12 pagesRadar (Electronics) - Britannica Online Encyclopedia PDFJitendra PanwarNo ratings yet
- An Electronic System That Uses Reflected Electromagnetic Energy To Detect The Presence and Position of Objects Invisible To The EyeDocument3 pagesAn Electronic System That Uses Reflected Electromagnetic Energy To Detect The Presence and Position of Objects Invisible To The EyeTensaiNo ratings yet
- Multispectral Imaging: Unlocking the Spectrum: Advancements in Computer VisionFrom EverandMultispectral Imaging: Unlocking the Spectrum: Advancements in Computer VisionNo ratings yet
- Nvsu FR Icd 02Document7 pagesNvsu FR Icd 02jimmyboyjrNo ratings yet
- Review 1 Coms Quiz #6Document71 pagesReview 1 Coms Quiz #6jimmyboyjrNo ratings yet
- Navigational AidsDocument1 pageNavigational AidsjimmyboyjrNo ratings yet
- Getting Started Matlab Lesson 1Document6 pagesGetting Started Matlab Lesson 1jimmyboyjrNo ratings yet
- Review 2018 Comms Quiz 1Document2 pagesReview 2018 Comms Quiz 1jimmyboyjrNo ratings yet
- Soil Moisture Sensor Technical Manual PDFDocument4 pagesSoil Moisture Sensor Technical Manual PDFjimmyboyjrNo ratings yet
- DLL All Subjects 2 q4 w1 d1Document8 pagesDLL All Subjects 2 q4 w1 d1jimmyboyjrNo ratings yet
- Selecting A Research TopicDocument1 pageSelecting A Research TopicjimmyboyjrNo ratings yet
- Objective:: Generation of Basic Signals Using MatlabDocument2 pagesObjective:: Generation of Basic Signals Using MatlabjimmyboyjrNo ratings yet
- Methods of ResearchDocument43 pagesMethods of ResearchjimmyboyjrNo ratings yet
- DLL All Subjects 2 q4 w1 d2Document9 pagesDLL All Subjects 2 q4 w1 d2jimmyboyjrNo ratings yet
- Electronic Devices and Circuits: Engr. Jimmy Carter B. Nilo, RECE August 2018Document17 pagesElectronic Devices and Circuits: Engr. Jimmy Carter B. Nilo, RECE August 2018jimmyboyjrNo ratings yet
- Kindergarten DLL Week 30Document4 pagesKindergarten DLL Week 30jimmyboyjr100% (1)
- Basic Computer TroubleshootingDocument28 pagesBasic Computer TroubleshootingjimmyboyjrNo ratings yet
- Lec 1Document35 pagesLec 1jimmyboyjrNo ratings yet
- DLL All Subjects 2 q4 w1 d3Document8 pagesDLL All Subjects 2 q4 w1 d3jimmyboyjrNo ratings yet
- Work Instruction: Verification of Analog Multitester (VOM)Document2 pagesWork Instruction: Verification of Analog Multitester (VOM)jimmyboyjrNo ratings yet
- Biag Ni Lam-Ang (Summary)Document3 pagesBiag Ni Lam-Ang (Summary)jimmyboyjrNo ratings yet
- 2n3055 Collector Characteristic CurveDocument3 pages2n3055 Collector Characteristic CurvejimmyboyjrNo ratings yet
- Research Design: Prepared By: Bimago, Jerome D. Bucsan, Danny Boy E. Bumanghat, Allen Bryan D. Bondoc, Jomar TDocument8 pagesResearch Design: Prepared By: Bimago, Jerome D. Bucsan, Danny Boy E. Bumanghat, Allen Bryan D. Bondoc, Jomar TjimmyboyjrNo ratings yet
- Correlation Survey and Longitudinal Survey Reporters Jim Aquino Jeftee Basatan Janel Biete Sharewin BaluddaDocument12 pagesCorrelation Survey and Longitudinal Survey Reporters Jim Aquino Jeftee Basatan Janel Biete Sharewin BaluddajimmyboyjrNo ratings yet
- The NBC 461 Guidelines For CceDocument25 pagesThe NBC 461 Guidelines For CcejimmyboyjrNo ratings yet
- 9013Document4 pages9013jimmyboyjrNo ratings yet
- VHHH Jeppesen ChartDocument94 pagesVHHH Jeppesen ChartTony Wong0% (1)
- Airports Authority of India (Aai) Training Report PDFDocument44 pagesAirports Authority of India (Aai) Training Report PDFpouninguang kameiNo ratings yet
- France PBN and GNSS StrategyDocument28 pagesFrance PBN and GNSS StrategyDmitriy MatenchookNo ratings yet
- C-141C Dash 1 005 1 - 151-200Document52 pagesC-141C Dash 1 005 1 - 151-200bkaplan452No ratings yet
- Garmin GNS 530 MANUAL PDFDocument47 pagesGarmin GNS 530 MANUAL PDFjozoce100% (1)
- B787 Communications OKDocument101 pagesB787 Communications OKابن كتاب ساميNo ratings yet
- CLASS TEST 01 Module 13Document1 pageCLASS TEST 01 Module 13Pravin HandeNo ratings yet
- Combitest419Document4 pagesCombitest419cipriancordeaNo ratings yet
- Jeppview For Windows: List of Pages in This Trip KitDocument16 pagesJeppview For Windows: List of Pages in This Trip KitRichard RiveraNo ratings yet
- Abreviations and Acronyms: Abbreviation DescriptionDocument13 pagesAbreviations and Acronyms: Abbreviation DescriptionrajNo ratings yet
- Sbgrkmia PDF 1627683240Document60 pagesSbgrkmia PDF 1627683240gamer p3p3gamerNo ratings yet
- Ils Concept Rev2Document180 pagesIls Concept Rev2Basu Dev AryalNo ratings yet
- Basis of Design ReportDocument49 pagesBasis of Design ReportshaggysamNo ratings yet
- Sistemi Ils (Instrument Landing Systems) E Mls (Microwave Landing Systems)Document44 pagesSistemi Ils (Instrument Landing Systems) E Mls (Microwave Landing Systems)Puneetha MadhuNo ratings yet
- DakarDocument19 pagesDakaroussamaborjNo ratings yet
- MMMX PDFDocument12 pagesMMMX PDFFelipe Valverde ChavezNo ratings yet
- Kdenkphl PDF 1708701535Document26 pagesKdenkphl PDF 1708701535bielpwkNo ratings yet
- Isi-00.00.00228 23may2018Document135 pagesIsi-00.00.00228 23may2018Do Gyi50% (2)
- Creative Flying TechniquesDocument16 pagesCreative Flying TechniquesAntonio PereiraNo ratings yet
- Met How Valley State Airport Final Alps Cope of WorkDocument12 pagesMet How Valley State Airport Final Alps Cope of WorkBrulin GJNo ratings yet
- ECS Avionics RF Assemblies: High Performance / Proven Reliability Key FeaturesDocument4 pagesECS Avionics RF Assemblies: High Performance / Proven Reliability Key FeaturesrafiNo ratings yet
- Ki 825 ManualDocument63 pagesKi 825 ManualTomas Kyso KyselicaNo ratings yet
- Aerodrome Op Min EASADocument16 pagesAerodrome Op Min EASAjaved iqbalNo ratings yet
- F 16 Landing TutorialDocument21 pagesF 16 Landing TutorialzenoxianNo ratings yet
- d8f f2 (July2015)Document26 pagesd8f f2 (July2015)dushroxNo ratings yet