
6 227 2005
6 227 2005
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5835)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (350)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (824)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- (PDF) Production and Operations Analysis, Seventh Edition Epub PopularDocument1 page(PDF) Production and Operations Analysis, Seventh Edition Epub PopularAgung Nugraha0% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Evolve 5 - Mid Term Test ReviewDocument9 pagesEvolve 5 - Mid Term Test ReviewLaiza Godoy100% (3)
- Model MH 70: Hydraulic Piston Actuator Operation and Maintenance ManualDocument35 pagesModel MH 70: Hydraulic Piston Actuator Operation and Maintenance ManualAhmed Ousama100% (3)
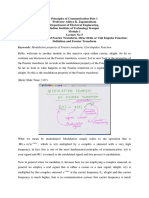
- Keywords: Modulation Property of Fourier Transform, Unit Impulse FunctionDocument16 pagesKeywords: Modulation Property of Fourier Transform, Unit Impulse FunctionghalzaiNo ratings yet
- Lec 04 PDFDocument14 pagesLec 04 PDFghalzaiNo ratings yet
- Concept Description: Joint Work Between: CRC (Canada) ETRI (Korea) UPV/EHU (Spain)Document1 pageConcept Description: Joint Work Between: CRC (Canada) ETRI (Korea) UPV/EHU (Spain)ghalzaiNo ratings yet
- Subcarrier Grouping OFDM For Visible-Light Communication SystemsDocument13 pagesSubcarrier Grouping OFDM For Visible-Light Communication SystemsghalzaiNo ratings yet
- 574 FTP Comp DHTDocument9 pages574 FTP Comp DHTghalzaiNo ratings yet
- DAJJAL 2 by Mufti Abu Lubaba Shah MansoorDocument250 pagesDAJJAL 2 by Mufti Abu Lubaba Shah MansoorInnaam Ijaz100% (1)
- ZAO CourseCatalogue 2013Document16 pagesZAO CourseCatalogue 2013ghalzaiNo ratings yet
- Attendance Sheet Digital Signal Processing BCE SP12Document2 pagesAttendance Sheet Digital Signal Processing BCE SP12ghalzaiNo ratings yet
- COMSATS Institute of Information Technology Lahore: COMSATS - Lancaster Dual Degree ProgrammeDocument1 pageCOMSATS Institute of Information Technology Lahore: COMSATS - Lancaster Dual Degree ProgrammeghalzaiNo ratings yet
- Rooms SP14 140212 0920Document9 pagesRooms SP14 140212 0920ghalzaiNo ratings yet
- Topics - Signals and SystemsDocument3 pagesTopics - Signals and SystemsghalzaiNo ratings yet
- 99ebook Com ErrataDocument12 pages99ebook Com ErrataghalzaiNo ratings yet
- Org DataDocument1 pageOrg DataghalzaiNo ratings yet
- Nyquist Stability CriterionDocument4 pagesNyquist Stability CriterionRajeev KumarNo ratings yet
- Fs 1-Episode 1Document9 pagesFs 1-Episode 1Louween Mendoza50% (2)
- Hiqmat KanthapuraDocument19 pagesHiqmat KanthapuraSohel Bangi0% (1)
- SCILOGEX SCI-L330-Pro ManualDocument14 pagesSCILOGEX SCI-L330-Pro ManualCaique Serapião de SalesNo ratings yet
- Clup Vol 2 Setoral Demographic StudyDocument61 pagesClup Vol 2 Setoral Demographic StudyIncog BasuraNo ratings yet
- Book Review: Self-Declaration of "No Plagiarism"Document3 pagesBook Review: Self-Declaration of "No Plagiarism"Movies PictureNo ratings yet
- Your Boss May Need Motivating, TooDocument3 pagesYour Boss May Need Motivating, TooegahmuliaNo ratings yet
- 2 - ComponentsDocument10 pages2 - ComponentsFaraz Electronic100% (1)
- EE420 SyllabusDocument1 pageEE420 Syllabussal1980No ratings yet
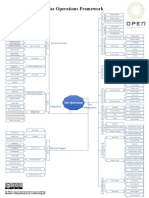
- OCP Framework - Mindmap.2019v1.4Document1 pageOCP Framework - Mindmap.2019v1.4LCNo ratings yet
- 01Document15 pages01Trishul Nath PallayNo ratings yet
- PMP Qns 41-60Document6 pagesPMP Qns 41-60longhoa1989No ratings yet
- Babylonjs GameDocument112 pagesBabylonjs GameGeorge DeacNo ratings yet
- Montessori Nomenclature Solar SystemDocument13 pagesMontessori Nomenclature Solar SystemJulieta NavoneNo ratings yet
- Vertical Bearings Type WV: Diameter Range 125... 710 MMDocument12 pagesVertical Bearings Type WV: Diameter Range 125... 710 MMLuis CeronNo ratings yet
- Practice Questions - Scholarden12Document4 pagesPractice Questions - Scholarden12Jawed Ahmed0% (1)
- Click Here For Download: (PDF) Fundamentals of EcologyDocument2 pagesClick Here For Download: (PDF) Fundamentals of EcologySujeet KumarNo ratings yet
- Office 365 Cheat Sheet PDFDocument3 pagesOffice 365 Cheat Sheet PDFSimplicitine100% (1)
- v16 - GE-1015 Jane's Aero Engine March 2000Document11 pagesv16 - GE-1015 Jane's Aero Engine March 2000Marcelo Roberti Rocha FantaguzziNo ratings yet
- TDS - Thioseal PSDocument4 pagesTDS - Thioseal PSCristal Haze VictoriaNo ratings yet
- Lesson PlanDocument6 pagesLesson PlanMegan ResslerNo ratings yet
- Leave Scheduler SystemDocument42 pagesLeave Scheduler SystemOkunade OluwafemiNo ratings yet
- Power Point Math COTDocument39 pagesPower Point Math COTmary jean sumalinogNo ratings yet
- Laro NG LahiDocument6 pagesLaro NG LahiIlog Mark Lawrence E.No ratings yet
- Challenges and Opportunities in Practical Training - Perceptions of Clinical EducationDocument10 pagesChallenges and Opportunities in Practical Training - Perceptions of Clinical EducationJaz TagalagNo ratings yet
- Mae 5310: Combustion Fundamentals: Laminar Premixed Flames Example, Applications and CommentsDocument22 pagesMae 5310: Combustion Fundamentals: Laminar Premixed Flames Example, Applications and CommentsAlex KeaneNo ratings yet
- CHN 2 Lec - Week 12 Documentation and ReportingDocument12 pagesCHN 2 Lec - Week 12 Documentation and Reportingyuuki konnoNo ratings yet

















































































Download as ppt, pdf, or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5835)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (350)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (824)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- (PDF) Production and Operations Analysis, Seventh Edition Epub PopularDocument1 page(PDF) Production and Operations Analysis, Seventh Edition Epub PopularAgung Nugraha0% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Evolve 5 - Mid Term Test ReviewDocument9 pagesEvolve 5 - Mid Term Test ReviewLaiza Godoy100% (3)
- Model MH 70: Hydraulic Piston Actuator Operation and Maintenance ManualDocument35 pagesModel MH 70: Hydraulic Piston Actuator Operation and Maintenance ManualAhmed Ousama100% (3)
- Keywords: Modulation Property of Fourier Transform, Unit Impulse FunctionDocument16 pagesKeywords: Modulation Property of Fourier Transform, Unit Impulse FunctionghalzaiNo ratings yet
- Lec 04 PDFDocument14 pagesLec 04 PDFghalzaiNo ratings yet
- Concept Description: Joint Work Between: CRC (Canada) ETRI (Korea) UPV/EHU (Spain)Document1 pageConcept Description: Joint Work Between: CRC (Canada) ETRI (Korea) UPV/EHU (Spain)ghalzaiNo ratings yet
- Subcarrier Grouping OFDM For Visible-Light Communication SystemsDocument13 pagesSubcarrier Grouping OFDM For Visible-Light Communication SystemsghalzaiNo ratings yet
- 574 FTP Comp DHTDocument9 pages574 FTP Comp DHTghalzaiNo ratings yet
- DAJJAL 2 by Mufti Abu Lubaba Shah MansoorDocument250 pagesDAJJAL 2 by Mufti Abu Lubaba Shah MansoorInnaam Ijaz100% (1)
- ZAO CourseCatalogue 2013Document16 pagesZAO CourseCatalogue 2013ghalzaiNo ratings yet
- Attendance Sheet Digital Signal Processing BCE SP12Document2 pagesAttendance Sheet Digital Signal Processing BCE SP12ghalzaiNo ratings yet
- COMSATS Institute of Information Technology Lahore: COMSATS - Lancaster Dual Degree ProgrammeDocument1 pageCOMSATS Institute of Information Technology Lahore: COMSATS - Lancaster Dual Degree ProgrammeghalzaiNo ratings yet
- Rooms SP14 140212 0920Document9 pagesRooms SP14 140212 0920ghalzaiNo ratings yet
- Topics - Signals and SystemsDocument3 pagesTopics - Signals and SystemsghalzaiNo ratings yet
- 99ebook Com ErrataDocument12 pages99ebook Com ErrataghalzaiNo ratings yet
- Org DataDocument1 pageOrg DataghalzaiNo ratings yet
- Nyquist Stability CriterionDocument4 pagesNyquist Stability CriterionRajeev KumarNo ratings yet
- Fs 1-Episode 1Document9 pagesFs 1-Episode 1Louween Mendoza50% (2)
- Hiqmat KanthapuraDocument19 pagesHiqmat KanthapuraSohel Bangi0% (1)
- SCILOGEX SCI-L330-Pro ManualDocument14 pagesSCILOGEX SCI-L330-Pro ManualCaique Serapião de SalesNo ratings yet
- Clup Vol 2 Setoral Demographic StudyDocument61 pagesClup Vol 2 Setoral Demographic StudyIncog BasuraNo ratings yet
- Book Review: Self-Declaration of "No Plagiarism"Document3 pagesBook Review: Self-Declaration of "No Plagiarism"Movies PictureNo ratings yet
- Your Boss May Need Motivating, TooDocument3 pagesYour Boss May Need Motivating, TooegahmuliaNo ratings yet
- 2 - ComponentsDocument10 pages2 - ComponentsFaraz Electronic100% (1)
- EE420 SyllabusDocument1 pageEE420 Syllabussal1980No ratings yet
- OCP Framework - Mindmap.2019v1.4Document1 pageOCP Framework - Mindmap.2019v1.4LCNo ratings yet
- 01Document15 pages01Trishul Nath PallayNo ratings yet
- PMP Qns 41-60Document6 pagesPMP Qns 41-60longhoa1989No ratings yet
- Babylonjs GameDocument112 pagesBabylonjs GameGeorge DeacNo ratings yet
- Montessori Nomenclature Solar SystemDocument13 pagesMontessori Nomenclature Solar SystemJulieta NavoneNo ratings yet
- Vertical Bearings Type WV: Diameter Range 125... 710 MMDocument12 pagesVertical Bearings Type WV: Diameter Range 125... 710 MMLuis CeronNo ratings yet
- Practice Questions - Scholarden12Document4 pagesPractice Questions - Scholarden12Jawed Ahmed0% (1)
- Click Here For Download: (PDF) Fundamentals of EcologyDocument2 pagesClick Here For Download: (PDF) Fundamentals of EcologySujeet KumarNo ratings yet
- Office 365 Cheat Sheet PDFDocument3 pagesOffice 365 Cheat Sheet PDFSimplicitine100% (1)
- v16 - GE-1015 Jane's Aero Engine March 2000Document11 pagesv16 - GE-1015 Jane's Aero Engine March 2000Marcelo Roberti Rocha FantaguzziNo ratings yet
- TDS - Thioseal PSDocument4 pagesTDS - Thioseal PSCristal Haze VictoriaNo ratings yet
- Lesson PlanDocument6 pagesLesson PlanMegan ResslerNo ratings yet
- Leave Scheduler SystemDocument42 pagesLeave Scheduler SystemOkunade OluwafemiNo ratings yet
- Power Point Math COTDocument39 pagesPower Point Math COTmary jean sumalinogNo ratings yet
- Laro NG LahiDocument6 pagesLaro NG LahiIlog Mark Lawrence E.No ratings yet
- Challenges and Opportunities in Practical Training - Perceptions of Clinical EducationDocument10 pagesChallenges and Opportunities in Practical Training - Perceptions of Clinical EducationJaz TagalagNo ratings yet
- Mae 5310: Combustion Fundamentals: Laminar Premixed Flames Example, Applications and CommentsDocument22 pagesMae 5310: Combustion Fundamentals: Laminar Premixed Flames Example, Applications and CommentsAlex KeaneNo ratings yet
- CHN 2 Lec - Week 12 Documentation and ReportingDocument12 pagesCHN 2 Lec - Week 12 Documentation and Reportingyuuki konnoNo ratings yet