
Topic 6
Topic 6
You might also like
- CHEM - Student Resource - Unit 2 - Key Concept 21 - Lesson 21Document5 pagesCHEM - Student Resource - Unit 2 - Key Concept 21 - Lesson 21Caleb Gasana0% (1)
- MMAT 255: Transport Phenomena in Materials Processing: Homework Problem 6.2 (Pg. 216)Document9 pagesMMAT 255: Transport Phenomena in Materials Processing: Homework Problem 6.2 (Pg. 216)Juan Camilo Hernandez Riascos100% (1)
- 6-Modeling of Fluid SystemsDocument25 pages6-Modeling of Fluid SystemsAzhar AliNo ratings yet
- 6-Modeling of Fluid SystemsDocument7 pages6-Modeling of Fluid SystemsUsama KaleemNo ratings yet
- 8 Lecture Notes-8 BEM2053 EM218Document20 pages8 Lecture Notes-8 BEM2053 EM218Abdirisak AhmedNo ratings yet
- 4978 6-2 Radial Flow Liquids Oct07Document23 pages4978 6-2 Radial Flow Liquids Oct07Muhammad RaezaNo ratings yet
- 02 1st Order SM Modeling & ResponseDocument119 pages02 1st Order SM Modeling & ResponseTarek A-RNo ratings yet
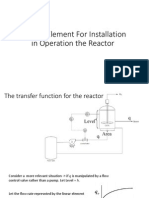
- Control Element For Installation in Operation The ReactorDocument7 pagesControl Element For Installation in Operation The ReactorHisyamuddin AliahNo ratings yet
- Chap. 5 Physical Examples of First-Order Systems-1Document25 pagesChap. 5 Physical Examples of First-Order Systems-1hmodi SaNeaNo ratings yet
- Continuity, Energy, and Momentum EquationsDocument36 pagesContinuity, Energy, and Momentum EquationsTruth RevealerNo ratings yet
- Control of Shunt Active FilterDocument31 pagesControl of Shunt Active FilterPooja VanamNo ratings yet
- Advance Fluid Mechanics: National UniversityDocument49 pagesAdvance Fluid Mechanics: National UniversityArhamNo ratings yet
- Ch. 6 The Impulse-Momentum PrincipleDocument35 pagesCh. 6 The Impulse-Momentum Principletony starkNo ratings yet
- Regimenes de FlujoDocument25 pagesRegimenes de FlujoYamal E Askoul TNo ratings yet
- Lecture 03 - The Heat Engine, 2nd and 3rd Laws of ThermodynamicsDocument22 pagesLecture 03 - The Heat Engine, 2nd and 3rd Laws of ThermodynamicsArc ZeroNo ratings yet
- Lecture 03 - The Heat Engine, 2nd and 3rd Laws of ThermodynamicsDocument22 pagesLecture 03 - The Heat Engine, 2nd and 3rd Laws of ThermodynamicsArc ZeroNo ratings yet
- Generation of Entropy To Generate Most Eligible Steam .Document43 pagesGeneration of Entropy To Generate Most Eligible Steam .atkuNo ratings yet
- Drilling - Hydraulics - Numericals PDFDocument59 pagesDrilling - Hydraulics - Numericals PDFpurabi bora100% (1)
- Liquid Level ControlDocument47 pagesLiquid Level ControlranjithkrajNo ratings yet
- Chapter 6 - 22-05-2023Document46 pagesChapter 6 - 22-05-2023garvitsrivastav2004No ratings yet
- Fluid05 CleanedDocument138 pagesFluid05 Cleanedzeljko volodarNo ratings yet
- Deliver Forces and Torques To Mechanical LoadsDocument29 pagesDeliver Forces and Torques To Mechanical LoadsMohammad BilalNo ratings yet
- Multiphase Reactors: CPE624 Faculty of Chemical EngineeringDocument38 pagesMultiphase Reactors: CPE624 Faculty of Chemical EngineeringUzuki ADNo ratings yet
- Lab Experiment 2 L Resistance and Time Constant For Liquid Level SystemDocument7 pagesLab Experiment 2 L Resistance and Time Constant For Liquid Level SystemRicky JayNo ratings yet
- Lecture 5 & 6 Dr. Mansoor - 3Document40 pagesLecture 5 & 6 Dr. Mansoor - 3mh0335053No ratings yet
- Chapter 6 - 31-05-2023Document163 pagesChapter 6 - 31-05-2023Saumitra PandeyNo ratings yet
- Mathematical Models of Physical SystemsDocument5 pagesMathematical Models of Physical SystemsAmitava BiswasNo ratings yet
- 9 - Basic Design Equations For Multiphase ReactorsDocument32 pages9 - Basic Design Equations For Multiphase ReactorssepticmoneyNo ratings yet
- Lec1920 AnimatedDocument46 pagesLec1920 AnimatedHarry HarrisNo ratings yet
- Tutorial 3Document4 pagesTutorial 3Vaibhav JaiswalNo ratings yet
- Fundamentals Adiabatic Reactors: Energy BalanceDocument33 pagesFundamentals Adiabatic Reactors: Energy BalanceVALENTINA ROSALES MORANo ratings yet
- Model QP 21ch52Document4 pagesModel QP 21ch52RochakNo ratings yet
- CH 11 Compressible FlowDocument76 pagesCH 11 Compressible FlowEssa RasanNo ratings yet
- Energy Balance Fundamentals Adiabatic ReactorsDocument34 pagesEnergy Balance Fundamentals Adiabatic ReactorskhunafaNo ratings yet
- Part 5: Advanced Control + Case StudiesDocument52 pagesPart 5: Advanced Control + Case StudiestahermohNo ratings yet
- 2.5 Hydraulic Design of Urban Drainage SystemsDocument42 pages2.5 Hydraulic Design of Urban Drainage SystemsRashmi SahooNo ratings yet
- Chapter 1 SlidesDocument13 pagesChapter 1 SlidesMohammed AlshangitiNo ratings yet
- PDF 21Document20 pagesPDF 21Sandip JagdaleNo ratings yet
- Boundary Layer & SeparationDocument7 pagesBoundary Layer & SeparationRehan SharmaNo ratings yet
- Unit-I Basic Concepts and Laws of ThermodynamicsDocument96 pagesUnit-I Basic Concepts and Laws of ThermodynamicssomasundaramrNo ratings yet
- MECH 3408 Mechanics of Fluids: Fluid Kinematics Dr. Jiyun Song Office: HW7-01 Email: Jsong90@hku - HKDocument23 pagesMECH 3408 Mechanics of Fluids: Fluid Kinematics Dr. Jiyun Song Office: HW7-01 Email: Jsong90@hku - HKYang Woo SeongNo ratings yet
- Bab 01Document39 pagesBab 01FendyNo ratings yet
- First LawDocument43 pagesFirst Lawviratbansal001No ratings yet
- 6AI1 Process Control Systems PDFDocument3 pages6AI1 Process Control Systems PDFMoumi PanditNo ratings yet
- Hydraulic Systems Use A Liquid As The Working Fluid - Pneumatic Systems Use Air or Other GasesDocument34 pagesHydraulic Systems Use A Liquid As The Working Fluid - Pneumatic Systems Use Air or Other Gasesataberk-ozkayaNo ratings yet
- perrycollins,+Jang+Fall+2016 ErrataDocument6 pagesperrycollins,+Jang+Fall+2016 ErrataMd Mainul Hsoen ImonNo ratings yet
- Physrevb.24.218 (Pfeuty)Document12 pagesPhysrevb.24.218 (Pfeuty)João Armando Sandron GaldinoNo ratings yet
- Chemical Reaction Engineering (CRE) Is TheDocument35 pagesChemical Reaction Engineering (CRE) Is TheFarah Talib Al-sudaniNo ratings yet
- Chapter - 6 - Pengantar KonveksiDocument46 pagesChapter - 6 - Pengantar KonveksiAldy GustaNo ratings yet
- Qahtani Ch04Document41 pagesQahtani Ch04Hammad PervezNo ratings yet
- 5 EnergyDocument33 pages5 Energysmithson JoeNo ratings yet
- Irjet V3i8413 PDFDocument5 pagesIrjet V3i8413 PDFyalllikNo ratings yet
- Lecture 8 Phase EquilibriumDocument24 pagesLecture 8 Phase EquilibriumiB13eNo ratings yet
- Chap. 6-3Document48 pagesChap. 6-3Nadeem ShaukatNo ratings yet
- Process Control: Pcchp4Document25 pagesProcess Control: Pcchp4Can TekinalpNo ratings yet
- Low Speed Aerodynamics ASE 320: Lecture 8: Control Volumes and Reynolds Transport TheoremDocument14 pagesLow Speed Aerodynamics ASE 320: Lecture 8: Control Volumes and Reynolds Transport TheoremMert BağrıyanıkNo ratings yet
- First Law of Thermodynamics Applied To ProcessesDocument43 pagesFirst Law of Thermodynamics Applied To ProcessesDavid ChikuseNo ratings yet
- C.6 Feedback Linearization PDFDocument4 pagesC.6 Feedback Linearization PDFFatihNo ratings yet
- Chapter2 Well TestingDocument88 pagesChapter2 Well TestingSebastiánRodríguezNo ratings yet
- Chapter 1 - Part 2 - 2Document10 pagesChapter 1 - Part 2 - 2حسن كميت hassankomeit lNo ratings yet
- Wind Pressures On A 6m Cube PDFDocument12 pagesWind Pressures On A 6m Cube PDFJosue Martinez LiwarekNo ratings yet
- PP A113 A158 PV PLUS Rev 001Document46 pagesPP A113 A158 PV PLUS Rev 001Ivan MaltsevNo ratings yet
- CH 10 Process IdentificationDocument31 pagesCH 10 Process IdentificationMohammad YounesNo ratings yet
- Filter Ion ExchangeDocument10 pagesFilter Ion Exchangemanjunath hrNo ratings yet
- Practice Problems Set 3Document5 pagesPractice Problems Set 3Shashwat Singh JamwalNo ratings yet
- AMR Active Magnetic Regenerative Refrige PDFDocument9 pagesAMR Active Magnetic Regenerative Refrige PDFsanath santhoshNo ratings yet
- Review of LadleDocument6 pagesReview of Ladlezsmith100% (1)
- Flow Over WeirsDocument13 pagesFlow Over WeirsIwuoha Maxrofuzo ChibuezeNo ratings yet
- Klinkenberg EffectDocument4 pagesKlinkenberg EffectQaiser Hafeez89% (9)
- Mass Transfer QuestionDocument3 pagesMass Transfer QuestionAz Zahra AzmiNo ratings yet
- Guided NotesDocument6 pagesGuided Notesapi-449009978No ratings yet
- Item Size Qty S.N O: Packing ListDocument18 pagesItem Size Qty S.N O: Packing ListMurali DharanNo ratings yet
- Heat Exchangers & Waste Heat RecoveryDocument30 pagesHeat Exchangers & Waste Heat RecoveryrsahayNo ratings yet
- Compiled Correlation For Shell Side Heat Transfer CoefficientDocument20 pagesCompiled Correlation For Shell Side Heat Transfer Coefficientscranderi100% (1)
- Losses of Turbo MachineryDocument15 pagesLosses of Turbo MachineryOld Oromo music museumNo ratings yet
- Squeeze Without Tool Engineering Risk AnalysisDocument2 pagesSqueeze Without Tool Engineering Risk AnalysisIbnu HasanNo ratings yet
- Mitsubishi Electric PUHY-P YKB-A1 Service Parts EngDocument25 pagesMitsubishi Electric PUHY-P YKB-A1 Service Parts EngBranko VeskovicNo ratings yet
- Introduction To Well Testing and Interpretation: WCP1 CourseDocument51 pagesIntroduction To Well Testing and Interpretation: WCP1 Courserabahnali75% (12)
- Documents - MX DPV Vertical Multistage Pumps 60 HZ Technical Data DP PumpsDocument80 pagesDocuments - MX DPV Vertical Multistage Pumps 60 HZ Technical Data DP PumpsAnonymous ItzBhUGoi100% (1)
- 03 Sname Integrated Simulation System For PropellerDocument16 pages03 Sname Integrated Simulation System For PropellerJ T Mendonça SantosNo ratings yet
- Dimensional AnalysisDocument50 pagesDimensional Analysism_alodat6144No ratings yet
- Conduits ASSIGNMENTDocument12 pagesConduits ASSIGNMENTishaq kazeemNo ratings yet
- Integrating AI Into Chemical EngineeringDocument11 pagesIntegrating AI Into Chemical EngineeringGeorges HachemNo ratings yet
- Sharp Crested WeirDocument7 pagesSharp Crested WeirAizuddinNo ratings yet
- Nguyen PDFDocument245 pagesNguyen PDFNur AishaNo ratings yet
- TemperatureDocument6 pagesTemperatureNur Khairiah Daimah SanupinNo ratings yet
- ULTRAFILTRATIONDocument22 pagesULTRAFILTRATIONpragati dwivedi100% (2)
- Statement of Grades: Subject NameDocument13 pagesStatement of Grades: Subject NameAnkit KumarNo ratings yet






















































































Download as ppt, pdf, or txt
You might also like
- CHEM - Student Resource - Unit 2 - Key Concept 21 - Lesson 21Document5 pagesCHEM - Student Resource - Unit 2 - Key Concept 21 - Lesson 21Caleb Gasana0% (1)
- MMAT 255: Transport Phenomena in Materials Processing: Homework Problem 6.2 (Pg. 216)Document9 pagesMMAT 255: Transport Phenomena in Materials Processing: Homework Problem 6.2 (Pg. 216)Juan Camilo Hernandez Riascos100% (1)
- 6-Modeling of Fluid SystemsDocument25 pages6-Modeling of Fluid SystemsAzhar AliNo ratings yet
- 6-Modeling of Fluid SystemsDocument7 pages6-Modeling of Fluid SystemsUsama KaleemNo ratings yet
- 8 Lecture Notes-8 BEM2053 EM218Document20 pages8 Lecture Notes-8 BEM2053 EM218Abdirisak AhmedNo ratings yet
- 4978 6-2 Radial Flow Liquids Oct07Document23 pages4978 6-2 Radial Flow Liquids Oct07Muhammad RaezaNo ratings yet
- 02 1st Order SM Modeling & ResponseDocument119 pages02 1st Order SM Modeling & ResponseTarek A-RNo ratings yet
- Control Element For Installation in Operation The ReactorDocument7 pagesControl Element For Installation in Operation The ReactorHisyamuddin AliahNo ratings yet
- Chap. 5 Physical Examples of First-Order Systems-1Document25 pagesChap. 5 Physical Examples of First-Order Systems-1hmodi SaNeaNo ratings yet
- Continuity, Energy, and Momentum EquationsDocument36 pagesContinuity, Energy, and Momentum EquationsTruth RevealerNo ratings yet
- Control of Shunt Active FilterDocument31 pagesControl of Shunt Active FilterPooja VanamNo ratings yet
- Advance Fluid Mechanics: National UniversityDocument49 pagesAdvance Fluid Mechanics: National UniversityArhamNo ratings yet
- Ch. 6 The Impulse-Momentum PrincipleDocument35 pagesCh. 6 The Impulse-Momentum Principletony starkNo ratings yet
- Regimenes de FlujoDocument25 pagesRegimenes de FlujoYamal E Askoul TNo ratings yet
- Lecture 03 - The Heat Engine, 2nd and 3rd Laws of ThermodynamicsDocument22 pagesLecture 03 - The Heat Engine, 2nd and 3rd Laws of ThermodynamicsArc ZeroNo ratings yet
- Lecture 03 - The Heat Engine, 2nd and 3rd Laws of ThermodynamicsDocument22 pagesLecture 03 - The Heat Engine, 2nd and 3rd Laws of ThermodynamicsArc ZeroNo ratings yet
- Generation of Entropy To Generate Most Eligible Steam .Document43 pagesGeneration of Entropy To Generate Most Eligible Steam .atkuNo ratings yet
- Drilling - Hydraulics - Numericals PDFDocument59 pagesDrilling - Hydraulics - Numericals PDFpurabi bora100% (1)
- Liquid Level ControlDocument47 pagesLiquid Level ControlranjithkrajNo ratings yet
- Chapter 6 - 22-05-2023Document46 pagesChapter 6 - 22-05-2023garvitsrivastav2004No ratings yet
- Fluid05 CleanedDocument138 pagesFluid05 Cleanedzeljko volodarNo ratings yet
- Deliver Forces and Torques To Mechanical LoadsDocument29 pagesDeliver Forces and Torques To Mechanical LoadsMohammad BilalNo ratings yet
- Multiphase Reactors: CPE624 Faculty of Chemical EngineeringDocument38 pagesMultiphase Reactors: CPE624 Faculty of Chemical EngineeringUzuki ADNo ratings yet
- Lab Experiment 2 L Resistance and Time Constant For Liquid Level SystemDocument7 pagesLab Experiment 2 L Resistance and Time Constant For Liquid Level SystemRicky JayNo ratings yet
- Lecture 5 & 6 Dr. Mansoor - 3Document40 pagesLecture 5 & 6 Dr. Mansoor - 3mh0335053No ratings yet
- Chapter 6 - 31-05-2023Document163 pagesChapter 6 - 31-05-2023Saumitra PandeyNo ratings yet
- Mathematical Models of Physical SystemsDocument5 pagesMathematical Models of Physical SystemsAmitava BiswasNo ratings yet
- 9 - Basic Design Equations For Multiphase ReactorsDocument32 pages9 - Basic Design Equations For Multiphase ReactorssepticmoneyNo ratings yet
- Lec1920 AnimatedDocument46 pagesLec1920 AnimatedHarry HarrisNo ratings yet
- Tutorial 3Document4 pagesTutorial 3Vaibhav JaiswalNo ratings yet
- Fundamentals Adiabatic Reactors: Energy BalanceDocument33 pagesFundamentals Adiabatic Reactors: Energy BalanceVALENTINA ROSALES MORANo ratings yet
- Model QP 21ch52Document4 pagesModel QP 21ch52RochakNo ratings yet
- CH 11 Compressible FlowDocument76 pagesCH 11 Compressible FlowEssa RasanNo ratings yet
- Energy Balance Fundamentals Adiabatic ReactorsDocument34 pagesEnergy Balance Fundamentals Adiabatic ReactorskhunafaNo ratings yet
- Part 5: Advanced Control + Case StudiesDocument52 pagesPart 5: Advanced Control + Case StudiestahermohNo ratings yet
- 2.5 Hydraulic Design of Urban Drainage SystemsDocument42 pages2.5 Hydraulic Design of Urban Drainage SystemsRashmi SahooNo ratings yet
- Chapter 1 SlidesDocument13 pagesChapter 1 SlidesMohammed AlshangitiNo ratings yet
- PDF 21Document20 pagesPDF 21Sandip JagdaleNo ratings yet
- Boundary Layer & SeparationDocument7 pagesBoundary Layer & SeparationRehan SharmaNo ratings yet
- Unit-I Basic Concepts and Laws of ThermodynamicsDocument96 pagesUnit-I Basic Concepts and Laws of ThermodynamicssomasundaramrNo ratings yet
- MECH 3408 Mechanics of Fluids: Fluid Kinematics Dr. Jiyun Song Office: HW7-01 Email: Jsong90@hku - HKDocument23 pagesMECH 3408 Mechanics of Fluids: Fluid Kinematics Dr. Jiyun Song Office: HW7-01 Email: Jsong90@hku - HKYang Woo SeongNo ratings yet
- Bab 01Document39 pagesBab 01FendyNo ratings yet
- First LawDocument43 pagesFirst Lawviratbansal001No ratings yet
- 6AI1 Process Control Systems PDFDocument3 pages6AI1 Process Control Systems PDFMoumi PanditNo ratings yet
- Hydraulic Systems Use A Liquid As The Working Fluid - Pneumatic Systems Use Air or Other GasesDocument34 pagesHydraulic Systems Use A Liquid As The Working Fluid - Pneumatic Systems Use Air or Other Gasesataberk-ozkayaNo ratings yet
- perrycollins,+Jang+Fall+2016 ErrataDocument6 pagesperrycollins,+Jang+Fall+2016 ErrataMd Mainul Hsoen ImonNo ratings yet
- Physrevb.24.218 (Pfeuty)Document12 pagesPhysrevb.24.218 (Pfeuty)João Armando Sandron GaldinoNo ratings yet
- Chemical Reaction Engineering (CRE) Is TheDocument35 pagesChemical Reaction Engineering (CRE) Is TheFarah Talib Al-sudaniNo ratings yet
- Chapter - 6 - Pengantar KonveksiDocument46 pagesChapter - 6 - Pengantar KonveksiAldy GustaNo ratings yet
- Qahtani Ch04Document41 pagesQahtani Ch04Hammad PervezNo ratings yet
- 5 EnergyDocument33 pages5 Energysmithson JoeNo ratings yet
- Irjet V3i8413 PDFDocument5 pagesIrjet V3i8413 PDFyalllikNo ratings yet
- Lecture 8 Phase EquilibriumDocument24 pagesLecture 8 Phase EquilibriumiB13eNo ratings yet
- Chap. 6-3Document48 pagesChap. 6-3Nadeem ShaukatNo ratings yet
- Process Control: Pcchp4Document25 pagesProcess Control: Pcchp4Can TekinalpNo ratings yet
- Low Speed Aerodynamics ASE 320: Lecture 8: Control Volumes and Reynolds Transport TheoremDocument14 pagesLow Speed Aerodynamics ASE 320: Lecture 8: Control Volumes and Reynolds Transport TheoremMert BağrıyanıkNo ratings yet
- First Law of Thermodynamics Applied To ProcessesDocument43 pagesFirst Law of Thermodynamics Applied To ProcessesDavid ChikuseNo ratings yet
- C.6 Feedback Linearization PDFDocument4 pagesC.6 Feedback Linearization PDFFatihNo ratings yet
- Chapter2 Well TestingDocument88 pagesChapter2 Well TestingSebastiánRodríguezNo ratings yet
- Chapter 1 - Part 2 - 2Document10 pagesChapter 1 - Part 2 - 2حسن كميت hassankomeit lNo ratings yet
- Wind Pressures On A 6m Cube PDFDocument12 pagesWind Pressures On A 6m Cube PDFJosue Martinez LiwarekNo ratings yet
- PP A113 A158 PV PLUS Rev 001Document46 pagesPP A113 A158 PV PLUS Rev 001Ivan MaltsevNo ratings yet
- CH 10 Process IdentificationDocument31 pagesCH 10 Process IdentificationMohammad YounesNo ratings yet
- Filter Ion ExchangeDocument10 pagesFilter Ion Exchangemanjunath hrNo ratings yet
- Practice Problems Set 3Document5 pagesPractice Problems Set 3Shashwat Singh JamwalNo ratings yet
- AMR Active Magnetic Regenerative Refrige PDFDocument9 pagesAMR Active Magnetic Regenerative Refrige PDFsanath santhoshNo ratings yet
- Review of LadleDocument6 pagesReview of Ladlezsmith100% (1)
- Flow Over WeirsDocument13 pagesFlow Over WeirsIwuoha Maxrofuzo ChibuezeNo ratings yet
- Klinkenberg EffectDocument4 pagesKlinkenberg EffectQaiser Hafeez89% (9)
- Mass Transfer QuestionDocument3 pagesMass Transfer QuestionAz Zahra AzmiNo ratings yet
- Guided NotesDocument6 pagesGuided Notesapi-449009978No ratings yet
- Item Size Qty S.N O: Packing ListDocument18 pagesItem Size Qty S.N O: Packing ListMurali DharanNo ratings yet
- Heat Exchangers & Waste Heat RecoveryDocument30 pagesHeat Exchangers & Waste Heat RecoveryrsahayNo ratings yet
- Compiled Correlation For Shell Side Heat Transfer CoefficientDocument20 pagesCompiled Correlation For Shell Side Heat Transfer Coefficientscranderi100% (1)
- Losses of Turbo MachineryDocument15 pagesLosses of Turbo MachineryOld Oromo music museumNo ratings yet
- Squeeze Without Tool Engineering Risk AnalysisDocument2 pagesSqueeze Without Tool Engineering Risk AnalysisIbnu HasanNo ratings yet
- Mitsubishi Electric PUHY-P YKB-A1 Service Parts EngDocument25 pagesMitsubishi Electric PUHY-P YKB-A1 Service Parts EngBranko VeskovicNo ratings yet
- Introduction To Well Testing and Interpretation: WCP1 CourseDocument51 pagesIntroduction To Well Testing and Interpretation: WCP1 Courserabahnali75% (12)
- Documents - MX DPV Vertical Multistage Pumps 60 HZ Technical Data DP PumpsDocument80 pagesDocuments - MX DPV Vertical Multistage Pumps 60 HZ Technical Data DP PumpsAnonymous ItzBhUGoi100% (1)
- 03 Sname Integrated Simulation System For PropellerDocument16 pages03 Sname Integrated Simulation System For PropellerJ T Mendonça SantosNo ratings yet
- Dimensional AnalysisDocument50 pagesDimensional Analysism_alodat6144No ratings yet
- Conduits ASSIGNMENTDocument12 pagesConduits ASSIGNMENTishaq kazeemNo ratings yet
- Integrating AI Into Chemical EngineeringDocument11 pagesIntegrating AI Into Chemical EngineeringGeorges HachemNo ratings yet
- Sharp Crested WeirDocument7 pagesSharp Crested WeirAizuddinNo ratings yet
- Nguyen PDFDocument245 pagesNguyen PDFNur AishaNo ratings yet
- TemperatureDocument6 pagesTemperatureNur Khairiah Daimah SanupinNo ratings yet
- ULTRAFILTRATIONDocument22 pagesULTRAFILTRATIONpragati dwivedi100% (2)
- Statement of Grades: Subject NameDocument13 pagesStatement of Grades: Subject NameAnkit KumarNo ratings yet