Download as pptx, pdf, or txt
You might also like
- CERTIFICATE Request Data: Student Copy InstituteDocument1 pageCERTIFICATE Request Data: Student Copy InstituteAbhishek BeraNo ratings yet
- Presentation 9 (Layout II)Document40 pagesPresentation 9 (Layout II)Weecky HunterNo ratings yet
- Advanced CFD: DR Tegegn DejeneDocument23 pagesAdvanced CFD: DR Tegegn Dejenebiruk1No ratings yet
- 7 - DE - CFD - Discretisation of Governing EquationsDocument17 pages7 - DE - CFD - Discretisation of Governing EquationsDiya ShettyNo ratings yet
- Finite Difference Discretization: Reference: Computational Fluid Dynamics by J. D. AndersonDocument40 pagesFinite Difference Discretization: Reference: Computational Fluid Dynamics by J. D. AndersonVinay KashyapNo ratings yet
- Finite Difference MethodDocument14 pagesFinite Difference MethodOMKAR PansareNo ratings yet
- Engineering Maths: Lesson 2 First Order Differential Equation - ContinuedDocument29 pagesEngineering Maths: Lesson 2 First Order Differential Equation - ContinuedAlan ChenNo ratings yet
- Partial Differential Equations and Their Classification:: Equilibrium ProblemsDocument21 pagesPartial Differential Equations and Their Classification:: Equilibrium ProblemsGovinda KabraNo ratings yet
- Finite Difference ApproximationsDocument11 pagesFinite Difference ApproximationsrockstarNo ratings yet
- Discretization of EquationDocument14 pagesDiscretization of Equationsandyengineer13No ratings yet
- ODE 03 PostedDocument81 pagesODE 03 PostedJennifer GonzalezNo ratings yet
- 32: FE Mesh Genera3on: APL705 Finite Element MethodDocument13 pages32: FE Mesh Genera3on: APL705 Finite Element MethodBendahara KibarNo ratings yet
- Week10&11 Differential EquationsDocument34 pagesWeek10&11 Differential EquationsCahaya FitrahkuNo ratings yet
- Numerical Methods in Computational Fluid Dynamics (CFD)Document40 pagesNumerical Methods in Computational Fluid Dynamics (CFD)Le QuangNo ratings yet
- 4A-Chapter4-Sec 4 1-4 2,4 4-4 5-ColorDocument43 pages4A-Chapter4-Sec 4 1-4 2,4 4-4 5-ColorAdven SimarmataNo ratings yet
- FEM3Document11 pagesFEM3Manander SInghNo ratings yet
- FenperLanjut#3-SCALING AND APPROXIMATION-2020Document15 pagesFenperLanjut#3-SCALING AND APPROXIMATION-2020Aji Ridho PangestuNo ratings yet
- 3.4 - Some Aspects of DiscretizationDocument38 pages3.4 - Some Aspects of DiscretizationAnonymous ARMtmNKLNo ratings yet
- CG Module 2 - Part1Document67 pagesCG Module 2 - Part1Nithin SSNo ratings yet
- FInite Difference MethodDocument17 pagesFInite Difference MethodARUN PRASATHNo ratings yet
- Electromagnetic TheoryDocument76 pagesElectromagnetic TheorybenoNo ratings yet
- Projective Geometry and TransformationsDocument37 pagesProjective Geometry and TransformationsyaswanthNo ratings yet
- Chapter 1 Group 6Document36 pagesChapter 1 Group 6wegeneargow11No ratings yet
- Lab 2 of RFDocument13 pagesLab 2 of RFsanaullah khanNo ratings yet
- Fem Short AnswersDocument8 pagesFem Short Answers21k95a0324No ratings yet
- Computational Fluid Dynamics and Flow LabDocument13 pagesComputational Fluid Dynamics and Flow LabAna S y Y100% (1)
- Unit 2 Combinational Logic DesignDocument249 pagesUnit 2 Combinational Logic DesignsharvarictamaneNo ratings yet
- 05 Computer VisionDocument64 pages05 Computer VisionmohamedNo ratings yet
- 3.1 Numerical Methods For ODEDocument36 pages3.1 Numerical Methods For ODEBikash HalderNo ratings yet
- Analysis of Numerical Schemes - IITMDocument32 pagesAnalysis of Numerical Schemes - IITMAchuta Murali Karthik VankayalaNo ratings yet
- Fuzzy Numbers & Fuzzy EquationDocument51 pagesFuzzy Numbers & Fuzzy Equationvpkvikas100% (1)
- CFD at Chapter-3Document22 pagesCFD at Chapter-3Pawan KumarNo ratings yet
- CFD and It'S Applications: Presented By: Mohit Nigam SC-B, CFD Division, HR Wing, NSTLDocument56 pagesCFD and It'S Applications: Presented By: Mohit Nigam SC-B, CFD Division, HR Wing, NSTLHN DasNo ratings yet
- MAE 640 Lec5Document17 pagesMAE 640 Lec5kostas.sierros9374No ratings yet
- PRESENTATION Computational Fluid Dynamics (CFD) IntroductionDocument67 pagesPRESENTATION Computational Fluid Dynamics (CFD) IntroductionSalvador Vargas-DiazNo ratings yet
- Topological Sorting: Directed Acyclic GraphDocument22 pagesTopological Sorting: Directed Acyclic Graphmark edwardsNo ratings yet
- Finite Difference WikipediaDocument6 pagesFinite Difference Wikipedialetter_ashish4444No ratings yet
- Slope of A Tangent Line and DerivativeDocument29 pagesSlope of A Tangent Line and DerivativeSherra Mae BagoodNo ratings yet
- Numerics Chapter 6 Numerical Diffentaion and IntegrationDocument48 pagesNumerics Chapter 6 Numerical Diffentaion and Integrationabelt1327No ratings yet
- Discretization TechniquesDocument29 pagesDiscretization TechniquesRahis Pal SinghNo ratings yet
- Aghdam 2014Document20 pagesAghdam 2014Vafa MirzaeiNo ratings yet
- FEM PresentationDocument75 pagesFEM PresentationGooftilaaAniJiraachuunkooYesusiinNo ratings yet
- Applications of Linear AlgebraDocument45 pagesApplications of Linear AlgebraSisitha100% (1)
- Chap1 PDFDocument16 pagesChap1 PDFJuan FelipeNo ratings yet
- Co2-S5 - Phase DifferenceDocument14 pagesCo2-S5 - Phase DifferencemohammedsaniyaamrinNo ratings yet
- Partitioning PDFDocument11 pagesPartitioning PDFRockeyNo ratings yet
- Wavelet Transform TheoryDocument29 pagesWavelet Transform TheoryIrfan ShaikNo ratings yet
- Last Time: - Many, Many Modeling TechniquesDocument23 pagesLast Time: - Many, Many Modeling TechniquesksNo ratings yet
- Vector CalculusDocument52 pagesVector CalculusYeri KimNo ratings yet
- Limitations of Polygonal Meshes - Planar Facets - Fixed Resolution - Deformation Is DifficultDocument21 pagesLimitations of Polygonal Meshes - Planar Facets - Fixed Resolution - Deformation Is DifficultPriyanka GuptaNo ratings yet
- Review of Discrete Fourier Transform: Cwliu@twins - Ee.nctu - Edu.twDocument46 pagesReview of Discrete Fourier Transform: Cwliu@twins - Ee.nctu - Edu.twhakkem bNo ratings yet
- Analog Devices and Circuits: Prof D John Pradeep VITDocument31 pagesAnalog Devices and Circuits: Prof D John Pradeep VITNilanjan BanerjeeNo ratings yet
- Solute Transport Numerical MethodsDocument22 pagesSolute Transport Numerical Methodsbong109No ratings yet
- Digital Signal ProcessingDocument23 pagesDigital Signal Processingrozan haqiNo ratings yet
- Basic Aspects of DiscretizationDocument56 pagesBasic Aspects of DiscretizationSuta VijayaNo ratings yet
- Extrapolation and InterpolationDocument37 pagesExtrapolation and InterpolationbromikeseriesNo ratings yet
- Lecture5, Root LocusDocument45 pagesLecture5, Root LocusHannah TalindaNo ratings yet
- 1 Partial Differential EquationsDocument44 pages1 Partial Differential EquationsMariel Palisoc100% (2)
- Geometric Primitives and TransformationsDocument35 pagesGeometric Primitives and TransformationssaranrajNo ratings yet
- Week01 - Introduction To NumericalDocument48 pagesWeek01 - Introduction To NumericalInunHazwaniKhairuddinNo ratings yet
- Transcripts Procedure LetterDocument1 pageTranscripts Procedure LetterAbhishek BeraNo ratings yet
- Conquer The Sky!: Full Professional Airline Pilot ProgramDocument12 pagesConquer The Sky!: Full Professional Airline Pilot ProgramAbhishek BeraNo ratings yet
- Click Link To Download Sab (Take From Home)Document13 pagesClick Link To Download Sab (Take From Home)Abhishek BeraNo ratings yet
- Mobile Services: Your Account Summary This Month'S ChargesDocument4 pagesMobile Services: Your Account Summary This Month'S ChargesAbhishek BeraNo ratings yet
- Commercial Pilot Entrance Syllabus: IGRUA CPL Test Syllabus For MathematicsDocument3 pagesCommercial Pilot Entrance Syllabus: IGRUA CPL Test Syllabus For MathematicsAbhishek Bera100% (1)
- Satellite Orbit and Constellation Design-1Document53 pagesSatellite Orbit and Constellation Design-1Abhishek BeraNo ratings yet
- AFCAT Model Question Paper-IVDocument8 pagesAFCAT Model Question Paper-IVnixsNo ratings yet
- Dr. Sreenadh Chevula, PH.D.: Space Mechanics (Eas457)Document18 pagesDr. Sreenadh Chevula, PH.D.: Space Mechanics (Eas457)Abhishek BeraNo ratings yet
- TPS and Materials Used in Re-Entry VehiclesDocument13 pagesTPS and Materials Used in Re-Entry VehiclesAbhishek Bera100% (1)
- Module-IV: Macro Mechanical Behavior of LaminateDocument143 pagesModule-IV: Macro Mechanical Behavior of LaminateAbhishek BeraNo ratings yet
- MCMproblems PDFDocument15 pagesMCMproblems PDFAbhishek BeraNo ratings yet
- Laplace Table PDFDocument2 pagesLaplace Table PDFAjit PanjaNo ratings yet
- Boyce ODEch 3 S 5 P 16Document2 pagesBoyce ODEch 3 S 5 P 16Jimmi NadapdapNo ratings yet
- Lesson 1 Part 1 Introduction To Differential EquationsDocument22 pagesLesson 1 Part 1 Introduction To Differential EquationsAlexah Marie BibatNo ratings yet
- Notes-MAT 111-1Document159 pagesNotes-MAT 111-1selva kumarNo ratings yet
- MTH101: Calculus I Lecture 6: Differentiation Formulas: International Burch UniversityDocument17 pagesMTH101: Calculus I Lecture 6: Differentiation Formulas: International Burch Universitylu cucuNo ratings yet
- More On The Cauchy-Riemann Equations: Ryan C. DailedaDocument15 pagesMore On The Cauchy-Riemann Equations: Ryan C. DailedaKay Chan SothearaNo ratings yet
- Student Solutions Manual: Boundary Value ProblemsDocument10 pagesStudent Solutions Manual: Boundary Value ProblemsshivanshNo ratings yet
- D. EquationsDocument39 pagesD. Equationsmumtaz aliNo ratings yet
- B.Tech. AIDS (R2019)Document190 pagesB.Tech. AIDS (R2019)Poornima.BNo ratings yet
- FoldableDocument2 pagesFoldableapi-261139685No ratings yet
- (Chapman and Hall - CRC Numerical Analysis and Scientific Computation Series) Stenger F.-Handbook of Sinc Numerical methods-CRC (2010) PDFDocument482 pages(Chapman and Hall - CRC Numerical Analysis and Scientific Computation Series) Stenger F.-Handbook of Sinc Numerical methods-CRC (2010) PDFFelipe Dilho100% (1)
- Ecc3012 Topic1 deDocument36 pagesEcc3012 Topic1 de周天乐No ratings yet
- ESE III DCHE, R - 17 (Responses)Document1 pageESE III DCHE, R - 17 (Responses)devraj raikarNo ratings yet
- Series Solutions: Bessel Functions, Legendre Polynomials: WWW Problems and SolutionsDocument6 pagesSeries Solutions: Bessel Functions, Legendre Polynomials: WWW Problems and SolutionsAtoy ValdezNo ratings yet
- Guidelines For The Method of Undetermined CoefficientsDocument6 pagesGuidelines For The Method of Undetermined CoefficientsSandipan SahaNo ratings yet
- M2 - Mid Sem IDocument2 pagesM2 - Mid Sem IHiten AhujaNo ratings yet
- Applied Maths - IIIDocument1 pageApplied Maths - IIIskyend_512100% (1)
- SYLLABIBAgEnggDegree PDFDocument38 pagesSYLLABIBAgEnggDegree PDFmadhusudanNo ratings yet
- Chapter 1 Advanced Differentiation: Example 1 SolutionDocument16 pagesChapter 1 Advanced Differentiation: Example 1 SolutionNur amirahNo ratings yet
- Principles of Managerial Economics (Free Ebook)Document81 pagesPrinciples of Managerial Economics (Free Ebook)ChareeeNo ratings yet
- Bernoullis EquationDocument2 pagesBernoullis EquationMoktar Pandarat Maca-arab100% (1)
- B.tech CSE Syllabus 2020-24-09-Apr-20 VNDocument191 pagesB.tech CSE Syllabus 2020-24-09-Apr-20 VNsatyam sharmaNo ratings yet
- 151 Implicit Differentiation Second DerivativesDocument7 pages151 Implicit Differentiation Second DerivativesEsa KhanNo ratings yet
- Ps Trigonometric Equations-IDocument3 pagesPs Trigonometric Equations-IAtulNo ratings yet
- Numerical Methods For Ordinary Differential Equations: A Thesis Submitted For The Degree ofDocument167 pagesNumerical Methods For Ordinary Differential Equations: A Thesis Submitted For The Degree ofnisa wahidatulNo ratings yet
- Differential EquationsDocument4 pagesDifferential Equationssandhya ganesanNo ratings yet
- Partial Differential Equations: MST209 Mathematical Methods and ModelsDocument32 pagesPartial Differential Equations: MST209 Mathematical Methods and Modelschristos032No ratings yet
- 1 - 8 Find The General Solution of Each Equation: Exercises B-4.1Document3 pages1 - 8 Find The General Solution of Each Equation: Exercises B-4.1Asad WadudNo ratings yet
- Homogenization of Biharmonic Equations in Domains Perforated With Tiny HolesDocument36 pagesHomogenization of Biharmonic Equations in Domains Perforated With Tiny HolesChristina JonesNo ratings yet
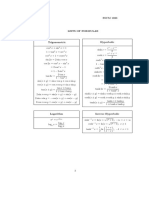
- List of Formulae Trigo-Sscm1023Document3 pagesList of Formulae Trigo-Sscm1023aieyinHengNo ratings yet