
Graph Algorithms: Text Book: Introduction To Algorithms Byclrs
Graph Algorithms: Text Book: Introduction To Algorithms Byclrs
You might also like
- Cse 331 HW 1 2Document8 pagesCse 331 HW 1 2api-522855390No ratings yet
- 1.2 Graph Theory PDFDocument10 pages1.2 Graph Theory PDFdassourav545No ratings yet
- Data Structures and Algorithm Unit 5Document57 pagesData Structures and Algorithm Unit 5Akhil SinghNo ratings yet
- GraphsDocument25 pagesGraphsMR.M.MURALI KRISHNANNo ratings yet
- Graphs, DFS, BFS, SP, ST AlgorithmsDocument31 pagesGraphs, DFS, BFS, SP, ST Algorithmsnajiullah khanNo ratings yet
- Chap 22Document29 pagesChap 22frankembangNo ratings yet
- Graphs: Dr.A.Ashok Kumar Department of Computer Science Alagappa Government Arts College KaraikudiDocument24 pagesGraphs: Dr.A.Ashok Kumar Department of Computer Science Alagappa Government Arts College KaraikudiAmbrose Ashok KumarNo ratings yet
- Graph and Graph TraaversalsDocument19 pagesGraph and Graph TraaversalsgopitheprinceNo ratings yet
- Floyd-Warshall AlgorithmDocument6 pagesFloyd-Warshall Algorithmbartee000No ratings yet
- GraphsDocument21 pagesGraphsJ SIRISHA DEVINo ratings yet
- Graphs PDFDocument66 pagesGraphs PDFsudhanNo ratings yet
- Single Source Shortest PathsDocument17 pagesSingle Source Shortest PathsAnukul GangwarNo ratings yet
- Depth First Search NihaDocument8 pagesDepth First Search Nihaniha2309No ratings yet
- Graph Theory Chapter 1-2Document16 pagesGraph Theory Chapter 1-2Roozbeh BassirianNo ratings yet
- Graph Theory NotesDocument53 pagesGraph Theory Notesmazhar10325100% (1)
- Algo Mod6 GraphsDocument75 pagesAlgo Mod6 GraphsISSAM HAMADNo ratings yet
- Graphs and Graph Traversals: // From Tree To Graph // Many Programs Can Be Cast As Problems On GraphDocument36 pagesGraphs and Graph Traversals: // From Tree To Graph // Many Programs Can Be Cast As Problems On GraphTanvir AhmedNo ratings yet
- Warshall Algorithm: Algorithm, or The WFI AlgorithmDocument15 pagesWarshall Algorithm: Algorithm, or The WFI AlgorithmChintan ParmarNo ratings yet
- Lecture 7Document40 pagesLecture 7Abraham GadissaNo ratings yet
- 3 NotesDocument4 pages3 NotesCyrus LiNo ratings yet
- 08 GraphsDocument20 pages08 GraphsDave Jedidiah TibaldoNo ratings yet
- Graph Algorithms Using Depth First Search: Analysis of Algorithms Week 8, Lecture 1Document60 pagesGraph Algorithms Using Depth First Search: Analysis of Algorithms Week 8, Lecture 1Naveen KumarNo ratings yet
- אלגוריתמים- הרצאה 5 - DFS, Topological Sort and Strongly Connected ComponentsDocument10 pagesאלגוריתמים- הרצאה 5 - DFS, Topological Sort and Strongly Connected ComponentsRonNo ratings yet
- Weighted Shortest PathDocument5 pagesWeighted Shortest PathKoka NoodlesNo ratings yet
- Lecture 9: Breadth-First Search: New Unit: Graphs!Document5 pagesLecture 9: Breadth-First Search: New Unit: Graphs!Van Vy HongNo ratings yet
- 2 5-ShortestPathDocument53 pages2 5-ShortestPathhung123ka5No ratings yet
- Graphs in Data Structure Using C ProgrammingDocument79 pagesGraphs in Data Structure Using C ProgrammingKaran RoyNo ratings yet
- DFS Unit 4Document5 pagesDFS Unit 4Bhagwat Singh BhatiNo ratings yet
- Shortest Paths in A Graph: Fundamental AlgorithmsDocument28 pagesShortest Paths in A Graph: Fundamental AlgorithmsShivam PandeyNo ratings yet
- Module89108 - 8647 - 4703440 - DITRUC1-Digraph Paths and SUbgraphsDocument25 pagesModule89108 - 8647 - 4703440 - DITRUC1-Digraph Paths and SUbgraphsSsteven John LavariasNo ratings yet
- 2019BMC IreneLo GraphTheory Handout 0Document14 pages2019BMC IreneLo GraphTheory Handout 0Phạm Hải ĐăngNo ratings yet
- Graph Theory: Introduction. Distance in Graphs. TreesDocument40 pagesGraph Theory: Introduction. Distance in Graphs. TreesRaluca RomanovNo ratings yet
- Algorithms and Computations Complexity: Single-Source Shortest PathsDocument12 pagesAlgorithms and Computations Complexity: Single-Source Shortest PathskhilNo ratings yet
- Lect05 Graph Shortest PathDocument7 pagesLect05 Graph Shortest PathAnthony-Dimitri ANo ratings yet
- Unit5 GraphsDocument40 pagesUnit5 GraphsInnovation SRINo ratings yet
- Elementary Graph Algorithms: Manoj Agnihotri M.Tech I.T Dept of CSE ACET AmritsarDocument58 pagesElementary Graph Algorithms: Manoj Agnihotri M.Tech I.T Dept of CSE ACET Amritsarkshitij1993No ratings yet
- Fig.1: A Typical Illustration of A GraphDocument11 pagesFig.1: A Typical Illustration of A Graphyousef tamerNo ratings yet
- Dr. Issam Alhadid Modification Date 4/3/2019Document75 pagesDr. Issam Alhadid Modification Date 4/3/2019ISSAM HAMADNo ratings yet
- Dfsand BfsDocument12 pagesDfsand BfsComputerScience DepartmentNo ratings yet
- Basics of Graph TheoryDocument31 pagesBasics of Graph Theorypurijatin100% (3)
- Data Structures and Algorithms (BCO 002A) UNIT-5Document64 pagesData Structures and Algorithms (BCO 002A) UNIT-5Priyansh DuveyNo ratings yet
- GraphsDocument39 pagesGraphsAtul SareenNo ratings yet
- Camino Mas CortoDocument17 pagesCamino Mas CortoDiego Muñoz CarrascoNo ratings yet
- Connectivity: PathsDocument7 pagesConnectivity: PathsNitin AgrawalNo ratings yet
- DSGTChap 6 Graph TheoryDocument54 pagesDSGTChap 6 Graph Theoryabcyz141608No ratings yet
- M222 GraphsDocument17 pagesM222 GraphspeuyNo ratings yet
- CS214 DS2022 Lec 13 - Graphs Part1Document71 pagesCS214 DS2022 Lec 13 - Graphs Part1azer elsaiedNo ratings yet
- Week 1-2: Graphs and SubgraphsDocument13 pagesWeek 1-2: Graphs and SubgraphsJohn ChanNo ratings yet
- Computer Science Exam Help: ProblemsDocument9 pagesComputer Science Exam Help: ProblemsProgramming Exam Help100% (1)
- Chap 24Document33 pagesChap 24hsohshNo ratings yet
- Graph-Theory PDF EbookDocument7 pagesGraph-Theory PDF EbookSudipto RoyNo ratings yet
- Graph Algorithms: CSE5311 - Lectures by Prof. Chris DingDocument12 pagesGraph Algorithms: CSE5311 - Lectures by Prof. Chris DingjawafuhajNo ratings yet
- T-79 4202 Solutions 4Document4 pagesT-79 4202 Solutions 4bobopowerNo ratings yet
- Algorithm Exam HelpDocument6 pagesAlgorithm Exam HelpProgramming Exam HelpNo ratings yet
- Adc 10Document42 pagesAdc 10ati atiNo ratings yet
- Unit 2 AlgorithmDocument39 pagesUnit 2 AlgorithmSubisha M SudhakarNo ratings yet
- MAT214ALecture4 3Document5 pagesMAT214ALecture4 3goflux pwnsNo ratings yet
- Laplacian Eigenvectors and Eigenvalues and AlmostDocument10 pagesLaplacian Eigenvectors and Eigenvalues and Almostmla01No ratings yet
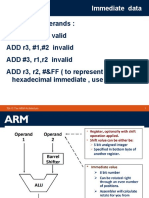
- Immediate Operands: ADD r3, r3, #1 Valid ADD r3, #1,#2 Invalid ADD #3, r1, r2 Invalid ADD r3, r2, #&FF (To Represent Hexadecimal Immediate, Use &)Document23 pagesImmediate Operands: ADD r3, r3, #1 Valid ADD r3, #1,#2 Invalid ADD #3, r1, r2 Invalid ADD r3, r2, #&FF (To Represent Hexadecimal Immediate, Use &)Rohith ThurlapatiNo ratings yet
- Lecture8 ARMDocument16 pagesLecture8 ARMRohith ThurlapatiNo ratings yet
- Embedded SystemsDocument23 pagesEmbedded SystemsRohith ThurlapatiNo ratings yet
- Lecture5 ARMDocument39 pagesLecture5 ARMRohith ThurlapatiNo ratings yet
- Thumb InstructionDocument52 pagesThumb InstructionRohith ThurlapatiNo ratings yet
- Branch Instructions: Branch: B Label Branch With Link: BL Subroutine - LabelDocument7 pagesBranch Instructions: Branch: B Label Branch With Link: BL Subroutine - LabelRohith ThurlapatiNo ratings yet
- Lecture1 ARMDocument25 pagesLecture1 ARMRohith ThurlapatiNo ratings yet
- Agenda: Introduction To ARM LTD Programmers Model Instruction Sets System Design Development ToolsDocument25 pagesAgenda: Introduction To ARM LTD Programmers Model Instruction Sets System Design Development ToolsRohith ThurlapatiNo ratings yet
- Lecture6 ARMDocument50 pagesLecture6 ARMRohith ThurlapatiNo ratings yet
- Enhanced Detection Algorithm Bacnet For Congestion: Random EarlyDocument4 pagesEnhanced Detection Algorithm Bacnet For Congestion: Random EarlyRohith ThurlapatiNo ratings yet
- Volatility CubeDocument16 pagesVolatility CubevferretNo ratings yet
- Form 3 Opener Exam Term 1 2020 Math-1Document15 pagesForm 3 Opener Exam Term 1 2020 Math-1MOHAMMED EL-HAJINo ratings yet
- Determination of A Mining Cutoff Grade Strategy Based On An Iterative Factor PDFDocument5 pagesDetermination of A Mining Cutoff Grade Strategy Based On An Iterative Factor PDFRenzo MurilloNo ratings yet
- MSC TCS Syllabi 2009Document91 pagesMSC TCS Syllabi 2009Aruna RenganathanNo ratings yet
- Camp General Emilio Aguinaldo High School: First Quarter Grade 9 Mathematics Week 1Document16 pagesCamp General Emilio Aguinaldo High School: First Quarter Grade 9 Mathematics Week 1Dexter SaladinoNo ratings yet
- Physics - Basic General Relativity (Benjamin McKay, U of Utah, 2001) PDFDocument24 pagesPhysics - Basic General Relativity (Benjamin McKay, U of Utah, 2001) PDFAmitanshu PandaNo ratings yet
- RD Sharma Class 8 Maths Chapter 8 Division of Algebraic Expressions PDFDocument34 pagesRD Sharma Class 8 Maths Chapter 8 Division of Algebraic Expressions PDFSavitaNo ratings yet
- Trigonometry Double Angle IdentitiesDocument21 pagesTrigonometry Double Angle IdentitiesMordecai NyashaNo ratings yet
- Homework # 7 Solutions: Math 111, Fall 2014 Instructor: Dr. Doreen de LeonDocument4 pagesHomework # 7 Solutions: Math 111, Fall 2014 Instructor: Dr. Doreen de Leonandrian maulanaNo ratings yet
- Chapter 2 - P2 PDFDocument41 pagesChapter 2 - P2 PDFDr-Rabia Almamalook100% (1)
- Add Math SPM Trial 2018 Perlis P2&Ans PDFDocument36 pagesAdd Math SPM Trial 2018 Perlis P2&Ans PDFKataba MyTutorNo ratings yet
- The Principles of ArithmeticsDocument378 pagesThe Principles of ArithmeticsRené Wester100% (1)
- PB3 StandardDocument6 pagesPB3 StandardSumitNo ratings yet
- Permutation and CombinationDocument17 pagesPermutation and CombinationKeppy AricangoyNo ratings yet
- Tutorial On Stochastic Differential EquationsDocument27 pagesTutorial On Stochastic Differential EquationsPranav ChandraNo ratings yet
- Surveying & Measurement: Accuracy and PrecisionDocument38 pagesSurveying & Measurement: Accuracy and PrecisionRodel Pacantes Ba-onNo ratings yet
- G10 Mathematics - 1st Periodic Test Oct 2022Document3 pagesG10 Mathematics - 1st Periodic Test Oct 2022Joy Marie Claire JumliNo ratings yet
- Lecture 3 Prob I If 2016Document44 pagesLecture 3 Prob I If 2016Mobasher MessiNo ratings yet
- Random VariablesDocument18 pagesRandom Variablesrashi jainNo ratings yet
- SSCDocument4 pagesSSCThirupathaiahNo ratings yet
- Module 5 Grade 10 FinalDocument9 pagesModule 5 Grade 10 FinalSandy CarbonillaNo ratings yet
- 01 - Unit and DimensionDocument3 pages01 - Unit and DimensionArijit MondalNo ratings yet
- Assignment 1: Compsci 1Jc3 Introduction To Computational Thinking Fall 2020Document5 pagesAssignment 1: Compsci 1Jc3 Introduction To Computational Thinking Fall 2020RamaDinakaranNo ratings yet
- QMI Assign 3 PDFDocument4 pagesQMI Assign 3 PDFRaza KhanNo ratings yet
- Mathematics: Quarter 1 - Module 2: Whole Numbers Up To 100 000Document20 pagesMathematics: Quarter 1 - Module 2: Whole Numbers Up To 100 000Jobelle Canlas100% (1)
- 6th Maths EM Term 1 Exam 2022 Original Question Paper Tenkasi District English Medium PDF DownloadDocument2 pages6th Maths EM Term 1 Exam 2022 Original Question Paper Tenkasi District English Medium PDF DownloadNepetimNo ratings yet
- Syllabus CFD For Aerospace ApplicationsDocument2 pagesSyllabus CFD For Aerospace ApplicationsMohammad Fazlur RahmanNo ratings yet
- Linear Diophantine EquationsDocument5 pagesLinear Diophantine EquationsAtharv GuptaNo ratings yet


































































































Download as pptx, pdf, or txt
You might also like
- Cse 331 HW 1 2Document8 pagesCse 331 HW 1 2api-522855390No ratings yet
- 1.2 Graph Theory PDFDocument10 pages1.2 Graph Theory PDFdassourav545No ratings yet
- Data Structures and Algorithm Unit 5Document57 pagesData Structures and Algorithm Unit 5Akhil SinghNo ratings yet
- GraphsDocument25 pagesGraphsMR.M.MURALI KRISHNANNo ratings yet
- Graphs, DFS, BFS, SP, ST AlgorithmsDocument31 pagesGraphs, DFS, BFS, SP, ST Algorithmsnajiullah khanNo ratings yet
- Chap 22Document29 pagesChap 22frankembangNo ratings yet
- Graphs: Dr.A.Ashok Kumar Department of Computer Science Alagappa Government Arts College KaraikudiDocument24 pagesGraphs: Dr.A.Ashok Kumar Department of Computer Science Alagappa Government Arts College KaraikudiAmbrose Ashok KumarNo ratings yet
- Graph and Graph TraaversalsDocument19 pagesGraph and Graph TraaversalsgopitheprinceNo ratings yet
- Floyd-Warshall AlgorithmDocument6 pagesFloyd-Warshall Algorithmbartee000No ratings yet
- GraphsDocument21 pagesGraphsJ SIRISHA DEVINo ratings yet
- Graphs PDFDocument66 pagesGraphs PDFsudhanNo ratings yet
- Single Source Shortest PathsDocument17 pagesSingle Source Shortest PathsAnukul GangwarNo ratings yet
- Depth First Search NihaDocument8 pagesDepth First Search Nihaniha2309No ratings yet
- Graph Theory Chapter 1-2Document16 pagesGraph Theory Chapter 1-2Roozbeh BassirianNo ratings yet
- Graph Theory NotesDocument53 pagesGraph Theory Notesmazhar10325100% (1)
- Algo Mod6 GraphsDocument75 pagesAlgo Mod6 GraphsISSAM HAMADNo ratings yet
- Graphs and Graph Traversals: // From Tree To Graph // Many Programs Can Be Cast As Problems On GraphDocument36 pagesGraphs and Graph Traversals: // From Tree To Graph // Many Programs Can Be Cast As Problems On GraphTanvir AhmedNo ratings yet
- Warshall Algorithm: Algorithm, or The WFI AlgorithmDocument15 pagesWarshall Algorithm: Algorithm, or The WFI AlgorithmChintan ParmarNo ratings yet
- Lecture 7Document40 pagesLecture 7Abraham GadissaNo ratings yet
- 3 NotesDocument4 pages3 NotesCyrus LiNo ratings yet
- 08 GraphsDocument20 pages08 GraphsDave Jedidiah TibaldoNo ratings yet
- Graph Algorithms Using Depth First Search: Analysis of Algorithms Week 8, Lecture 1Document60 pagesGraph Algorithms Using Depth First Search: Analysis of Algorithms Week 8, Lecture 1Naveen KumarNo ratings yet
- אלגוריתמים- הרצאה 5 - DFS, Topological Sort and Strongly Connected ComponentsDocument10 pagesאלגוריתמים- הרצאה 5 - DFS, Topological Sort and Strongly Connected ComponentsRonNo ratings yet
- Weighted Shortest PathDocument5 pagesWeighted Shortest PathKoka NoodlesNo ratings yet
- Lecture 9: Breadth-First Search: New Unit: Graphs!Document5 pagesLecture 9: Breadth-First Search: New Unit: Graphs!Van Vy HongNo ratings yet
- 2 5-ShortestPathDocument53 pages2 5-ShortestPathhung123ka5No ratings yet
- Graphs in Data Structure Using C ProgrammingDocument79 pagesGraphs in Data Structure Using C ProgrammingKaran RoyNo ratings yet
- DFS Unit 4Document5 pagesDFS Unit 4Bhagwat Singh BhatiNo ratings yet
- Shortest Paths in A Graph: Fundamental AlgorithmsDocument28 pagesShortest Paths in A Graph: Fundamental AlgorithmsShivam PandeyNo ratings yet
- Module89108 - 8647 - 4703440 - DITRUC1-Digraph Paths and SUbgraphsDocument25 pagesModule89108 - 8647 - 4703440 - DITRUC1-Digraph Paths and SUbgraphsSsteven John LavariasNo ratings yet
- 2019BMC IreneLo GraphTheory Handout 0Document14 pages2019BMC IreneLo GraphTheory Handout 0Phạm Hải ĐăngNo ratings yet
- Graph Theory: Introduction. Distance in Graphs. TreesDocument40 pagesGraph Theory: Introduction. Distance in Graphs. TreesRaluca RomanovNo ratings yet
- Algorithms and Computations Complexity: Single-Source Shortest PathsDocument12 pagesAlgorithms and Computations Complexity: Single-Source Shortest PathskhilNo ratings yet
- Lect05 Graph Shortest PathDocument7 pagesLect05 Graph Shortest PathAnthony-Dimitri ANo ratings yet
- Unit5 GraphsDocument40 pagesUnit5 GraphsInnovation SRINo ratings yet
- Elementary Graph Algorithms: Manoj Agnihotri M.Tech I.T Dept of CSE ACET AmritsarDocument58 pagesElementary Graph Algorithms: Manoj Agnihotri M.Tech I.T Dept of CSE ACET Amritsarkshitij1993No ratings yet
- Fig.1: A Typical Illustration of A GraphDocument11 pagesFig.1: A Typical Illustration of A Graphyousef tamerNo ratings yet
- Dr. Issam Alhadid Modification Date 4/3/2019Document75 pagesDr. Issam Alhadid Modification Date 4/3/2019ISSAM HAMADNo ratings yet
- Dfsand BfsDocument12 pagesDfsand BfsComputerScience DepartmentNo ratings yet
- Basics of Graph TheoryDocument31 pagesBasics of Graph Theorypurijatin100% (3)
- Data Structures and Algorithms (BCO 002A) UNIT-5Document64 pagesData Structures and Algorithms (BCO 002A) UNIT-5Priyansh DuveyNo ratings yet
- GraphsDocument39 pagesGraphsAtul SareenNo ratings yet
- Camino Mas CortoDocument17 pagesCamino Mas CortoDiego Muñoz CarrascoNo ratings yet
- Connectivity: PathsDocument7 pagesConnectivity: PathsNitin AgrawalNo ratings yet
- DSGTChap 6 Graph TheoryDocument54 pagesDSGTChap 6 Graph Theoryabcyz141608No ratings yet
- M222 GraphsDocument17 pagesM222 GraphspeuyNo ratings yet
- CS214 DS2022 Lec 13 - Graphs Part1Document71 pagesCS214 DS2022 Lec 13 - Graphs Part1azer elsaiedNo ratings yet
- Week 1-2: Graphs and SubgraphsDocument13 pagesWeek 1-2: Graphs and SubgraphsJohn ChanNo ratings yet
- Computer Science Exam Help: ProblemsDocument9 pagesComputer Science Exam Help: ProblemsProgramming Exam Help100% (1)
- Chap 24Document33 pagesChap 24hsohshNo ratings yet
- Graph-Theory PDF EbookDocument7 pagesGraph-Theory PDF EbookSudipto RoyNo ratings yet
- Graph Algorithms: CSE5311 - Lectures by Prof. Chris DingDocument12 pagesGraph Algorithms: CSE5311 - Lectures by Prof. Chris DingjawafuhajNo ratings yet
- T-79 4202 Solutions 4Document4 pagesT-79 4202 Solutions 4bobopowerNo ratings yet
- Algorithm Exam HelpDocument6 pagesAlgorithm Exam HelpProgramming Exam HelpNo ratings yet
- Adc 10Document42 pagesAdc 10ati atiNo ratings yet
- Unit 2 AlgorithmDocument39 pagesUnit 2 AlgorithmSubisha M SudhakarNo ratings yet
- MAT214ALecture4 3Document5 pagesMAT214ALecture4 3goflux pwnsNo ratings yet
- Laplacian Eigenvectors and Eigenvalues and AlmostDocument10 pagesLaplacian Eigenvectors and Eigenvalues and Almostmla01No ratings yet
- Immediate Operands: ADD r3, r3, #1 Valid ADD r3, #1,#2 Invalid ADD #3, r1, r2 Invalid ADD r3, r2, #&FF (To Represent Hexadecimal Immediate, Use &)Document23 pagesImmediate Operands: ADD r3, r3, #1 Valid ADD r3, #1,#2 Invalid ADD #3, r1, r2 Invalid ADD r3, r2, #&FF (To Represent Hexadecimal Immediate, Use &)Rohith ThurlapatiNo ratings yet
- Lecture8 ARMDocument16 pagesLecture8 ARMRohith ThurlapatiNo ratings yet
- Embedded SystemsDocument23 pagesEmbedded SystemsRohith ThurlapatiNo ratings yet
- Lecture5 ARMDocument39 pagesLecture5 ARMRohith ThurlapatiNo ratings yet
- Thumb InstructionDocument52 pagesThumb InstructionRohith ThurlapatiNo ratings yet
- Branch Instructions: Branch: B Label Branch With Link: BL Subroutine - LabelDocument7 pagesBranch Instructions: Branch: B Label Branch With Link: BL Subroutine - LabelRohith ThurlapatiNo ratings yet
- Lecture1 ARMDocument25 pagesLecture1 ARMRohith ThurlapatiNo ratings yet
- Agenda: Introduction To ARM LTD Programmers Model Instruction Sets System Design Development ToolsDocument25 pagesAgenda: Introduction To ARM LTD Programmers Model Instruction Sets System Design Development ToolsRohith ThurlapatiNo ratings yet
- Lecture6 ARMDocument50 pagesLecture6 ARMRohith ThurlapatiNo ratings yet
- Enhanced Detection Algorithm Bacnet For Congestion: Random EarlyDocument4 pagesEnhanced Detection Algorithm Bacnet For Congestion: Random EarlyRohith ThurlapatiNo ratings yet
- Volatility CubeDocument16 pagesVolatility CubevferretNo ratings yet
- Form 3 Opener Exam Term 1 2020 Math-1Document15 pagesForm 3 Opener Exam Term 1 2020 Math-1MOHAMMED EL-HAJINo ratings yet
- Determination of A Mining Cutoff Grade Strategy Based On An Iterative Factor PDFDocument5 pagesDetermination of A Mining Cutoff Grade Strategy Based On An Iterative Factor PDFRenzo MurilloNo ratings yet
- MSC TCS Syllabi 2009Document91 pagesMSC TCS Syllabi 2009Aruna RenganathanNo ratings yet
- Camp General Emilio Aguinaldo High School: First Quarter Grade 9 Mathematics Week 1Document16 pagesCamp General Emilio Aguinaldo High School: First Quarter Grade 9 Mathematics Week 1Dexter SaladinoNo ratings yet
- Physics - Basic General Relativity (Benjamin McKay, U of Utah, 2001) PDFDocument24 pagesPhysics - Basic General Relativity (Benjamin McKay, U of Utah, 2001) PDFAmitanshu PandaNo ratings yet
- RD Sharma Class 8 Maths Chapter 8 Division of Algebraic Expressions PDFDocument34 pagesRD Sharma Class 8 Maths Chapter 8 Division of Algebraic Expressions PDFSavitaNo ratings yet
- Trigonometry Double Angle IdentitiesDocument21 pagesTrigonometry Double Angle IdentitiesMordecai NyashaNo ratings yet
- Homework # 7 Solutions: Math 111, Fall 2014 Instructor: Dr. Doreen de LeonDocument4 pagesHomework # 7 Solutions: Math 111, Fall 2014 Instructor: Dr. Doreen de Leonandrian maulanaNo ratings yet
- Chapter 2 - P2 PDFDocument41 pagesChapter 2 - P2 PDFDr-Rabia Almamalook100% (1)
- Add Math SPM Trial 2018 Perlis P2&Ans PDFDocument36 pagesAdd Math SPM Trial 2018 Perlis P2&Ans PDFKataba MyTutorNo ratings yet
- The Principles of ArithmeticsDocument378 pagesThe Principles of ArithmeticsRené Wester100% (1)
- PB3 StandardDocument6 pagesPB3 StandardSumitNo ratings yet
- Permutation and CombinationDocument17 pagesPermutation and CombinationKeppy AricangoyNo ratings yet
- Tutorial On Stochastic Differential EquationsDocument27 pagesTutorial On Stochastic Differential EquationsPranav ChandraNo ratings yet
- Surveying & Measurement: Accuracy and PrecisionDocument38 pagesSurveying & Measurement: Accuracy and PrecisionRodel Pacantes Ba-onNo ratings yet
- G10 Mathematics - 1st Periodic Test Oct 2022Document3 pagesG10 Mathematics - 1st Periodic Test Oct 2022Joy Marie Claire JumliNo ratings yet
- Lecture 3 Prob I If 2016Document44 pagesLecture 3 Prob I If 2016Mobasher MessiNo ratings yet
- Random VariablesDocument18 pagesRandom Variablesrashi jainNo ratings yet
- SSCDocument4 pagesSSCThirupathaiahNo ratings yet
- Module 5 Grade 10 FinalDocument9 pagesModule 5 Grade 10 FinalSandy CarbonillaNo ratings yet
- 01 - Unit and DimensionDocument3 pages01 - Unit and DimensionArijit MondalNo ratings yet
- Assignment 1: Compsci 1Jc3 Introduction To Computational Thinking Fall 2020Document5 pagesAssignment 1: Compsci 1Jc3 Introduction To Computational Thinking Fall 2020RamaDinakaranNo ratings yet
- QMI Assign 3 PDFDocument4 pagesQMI Assign 3 PDFRaza KhanNo ratings yet
- Mathematics: Quarter 1 - Module 2: Whole Numbers Up To 100 000Document20 pagesMathematics: Quarter 1 - Module 2: Whole Numbers Up To 100 000Jobelle Canlas100% (1)
- 6th Maths EM Term 1 Exam 2022 Original Question Paper Tenkasi District English Medium PDF DownloadDocument2 pages6th Maths EM Term 1 Exam 2022 Original Question Paper Tenkasi District English Medium PDF DownloadNepetimNo ratings yet
- Syllabus CFD For Aerospace ApplicationsDocument2 pagesSyllabus CFD For Aerospace ApplicationsMohammad Fazlur RahmanNo ratings yet
- Linear Diophantine EquationsDocument5 pagesLinear Diophantine EquationsAtharv GuptaNo ratings yet