Download as pptx, pdf, or txt
You might also like
- Final Boq Elec HotelDocument10 pagesFinal Boq Elec Hoteldamianuskrowin100% (1)
- MDC Ba 101 76Document190 pagesMDC Ba 101 76Marc MP100% (1)
- MCR2 EncoderDocument19 pagesMCR2 EncoderCarlos SolanoNo ratings yet
- User Manual of STE18-A Prepaid Keypad Single Phase Electricity MeterDocument5 pagesUser Manual of STE18-A Prepaid Keypad Single Phase Electricity MeterweliNo ratings yet
- Embedded Systems Unit 2 Part 3-1Document50 pagesEmbedded Systems Unit 2 Part 3-1Donthula LayaNo ratings yet
- Unit 2 Part 3Document50 pagesUnit 2 Part 3Anusha ChilupuriNo ratings yet
- Embedded Systems Slides FinalDocument349 pagesEmbedded Systems Slides FinalAyush SinghNo ratings yet
- 5kv InverterDocument30 pages5kv InverterOjobo BlessingNo ratings yet
- Power Electronics in Future Electrical Power GridsDocument18 pagesPower Electronics in Future Electrical Power GridsPratik PatilNo ratings yet
- Sensors and Actuator NotesDocument5 pagesSensors and Actuator NotesSatya SinhaNo ratings yet
- Line Follower RobotDocument62 pagesLine Follower RobotPraveen Khatkale PatilNo ratings yet
- 1.power-Generating Knee Strap Hints at End For BatteriesDocument23 pages1.power-Generating Knee Strap Hints at End For BatteriesSRL MECHNo ratings yet
- Fault Identification of 3-Phase Slip Ring Induction MotorDocument15 pagesFault Identification of 3-Phase Slip Ring Induction MotoraashiqeeeNo ratings yet
- SEM6 EmbeddedsystemnotesDocument40 pagesSEM6 Embeddedsystemnotesrg998482No ratings yet
- ProjectDocument17 pagesProjectnandan05No ratings yet
- (EEE Course Material) EEE 4251 Power ElectronicsDocument282 pages(EEE Course Material) EEE 4251 Power Electronicsnibbanibbi013No ratings yet
- AJJDocument10 pagesAJJmandalapu91No ratings yet
- Unit - 06: Interfacing of PIC MicrocontrollerDocument7 pagesUnit - 06: Interfacing of PIC MicrocontrollerOmkar SheteNo ratings yet
- Fault Identification of 3-Phase Slip Ring Induction MotorDocument27 pagesFault Identification of 3-Phase Slip Ring Induction MotoraashiqeeeNo ratings yet
- Sensors and ActuatorsDocument10 pagesSensors and ActuatorsEdward ChachaNo ratings yet
- Types of MotorsDocument15 pagesTypes of Motorskbp qawaNo ratings yet
- Light Follower Bot: Anurag YadavDocument16 pagesLight Follower Bot: Anurag YadavMohsin ShaikhNo ratings yet
- Design and Implementation of A 5 kVA InverterDocument22 pagesDesign and Implementation of A 5 kVA InverterscribsunilNo ratings yet
- Design and Develop An IGBT Inverter For AC Motor Drive ApplicationsDocument40 pagesDesign and Develop An IGBT Inverter For AC Motor Drive Applicationselectron1999100% (1)
- Nellore: Deparment of Electronics and Instrumentation EngineeringDocument15 pagesNellore: Deparment of Electronics and Instrumentation EngineeringGandham NagasivaNo ratings yet
- Aditya Lab 12Document19 pagesAditya Lab 12Sujeet PawarNo ratings yet
- Motor Control: (Relay, PWM, DC, and Stepper Motors)Document36 pagesMotor Control: (Relay, PWM, DC, and Stepper Motors)Ammar EhabNo ratings yet
- Mr. D.B.Krishnamurthy: Internal GuideDocument34 pagesMr. D.B.Krishnamurthy: Internal GuideSai TejaNo ratings yet
- Skuba 2009 Extended Team Description: Abstract. This Paper Is Used To Describe The Skuba Small-Size League RobotDocument27 pagesSkuba 2009 Extended Team Description: Abstract. This Paper Is Used To Describe The Skuba Small-Size League RobotSaith Rodriguez RojasNo ratings yet
- Minor ProjectDocument12 pagesMinor ProjectKaran SahNo ratings yet
- ES Unit 2 - 3Document31 pagesES Unit 2 - 3Mahesh 8978No ratings yet
- LocoDocument28 pagesLocosuvratNo ratings yet
- Ej501 t1 Introduction To Automation System1Document86 pagesEj501 t1 Introduction To Automation System1Loga HSNo ratings yet
- Automatic Railway Gate Controller Project ReportDocument32 pagesAutomatic Railway Gate Controller Project ReportAbhijeet Pareek71% (7)
- Inverter Circuit ThoeryDocument8 pagesInverter Circuit ThoeryAbhishek SainiNo ratings yet
- Power SupplyDocument13 pagesPower SupplyAmpolitozNo ratings yet
- Stepper Motor ReportDocument13 pagesStepper Motor ReportVolda0% (2)
- Arduino 3D Wire Bending Machine: Nettur Technical Training FoundationDocument23 pagesArduino 3D Wire Bending Machine: Nettur Technical Training FoundationManoj KumarNo ratings yet
- IOT Smart Energy GridDocument10 pagesIOT Smart Energy Gridinnovative VijayawadaNo ratings yet
- AES Unit1 - SlidesDocument76 pagesAES Unit1 - SlidesOmkar KanetkarNo ratings yet
- Rescue Robot: Presented By: Supervised byDocument30 pagesRescue Robot: Presented By: Supervised byNazmul Shikder RiyadhNo ratings yet
- Building Automated Robots: Sagar N & Sanjay R III Year ECEDocument34 pagesBuilding Automated Robots: Sagar N & Sanjay R III Year ECEviswakshaNo ratings yet
- Brake Failure IndicatorDocument28 pagesBrake Failure Indicatorrishika71% (7)
- VVVFD 2Document25 pagesVVVFD 2syed42210No ratings yet
- Solar Tracking System With GSM Monitoring: Report On Stepper Motor DriverDocument30 pagesSolar Tracking System With GSM Monitoring: Report On Stepper Motor DriverRam PrasathNo ratings yet
- A Modified Sepic Converter For High-Power-FactorDocument23 pagesA Modified Sepic Converter For High-Power-FactorSana YasmeenNo ratings yet
- E - BikeDocument17 pagesE - BikeSaurabh DeshmukhNo ratings yet
- Design and Implementation of Technique of Maximum Power Utilization of Solar PanelDocument16 pagesDesign and Implementation of Technique of Maximum Power Utilization of Solar Panelg arunNo ratings yet
- Tracking and CleaningDocument18 pagesTracking and CleaningParuthi Ilam VazhuthiNo ratings yet
- Mechatronics Mid Exam and Final Question.Document26 pagesMechatronics Mid Exam and Final Question.yohanis johnNo ratings yet
- Externally Powered Prosthetic DevicesDocument17 pagesExternally Powered Prosthetic DevicesNivetha RavikumarNo ratings yet
- DC Motor Control Using 8085Document48 pagesDC Motor Control Using 8085Bhavya Wadhwa100% (3)
- DC Motor ChopperDocument7 pagesDC Motor ChopperRoberto MartinezNo ratings yet
- اردوينو pidDocument4 pagesاردوينو pidgadaNo ratings yet
- 3.automated Transformer Coil Winding MachineDocument31 pages3.automated Transformer Coil Winding Machinecelphone533No ratings yet
- Cable Line Fault Detection: Department of EEE, University Name, BangladeshDocument17 pagesCable Line Fault Detection: Department of EEE, University Name, BangladeshAmita RakhitNo ratings yet
- Propeller DisplayDocument39 pagesPropeller DisplayAswathy ChandranNo ratings yet
- Opto IsolationDocument5 pagesOpto IsolationMahendra JoshiNo ratings yet
- Control Theory 31 PDFDocument44 pagesControl Theory 31 PDFAmit TiwaryNo ratings yet
- Solar InverterDocument20 pagesSolar InverterHacker 123No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- ARM Lab Question BankDocument3 pagesARM Lab Question Bankbalajibs203285No ratings yet
- Module 5 PDFDocument35 pagesModule 5 PDFbalajibs203285No ratings yet
- Embedded System Design Concepts Module-4: Characteristics & Quality Attributes of Embedded SystemsDocument14 pagesEmbedded System Design Concepts Module-4: Characteristics & Quality Attributes of Embedded Systemsbalajibs203285No ratings yet
- ACES M3 Notes0001 PDFDocument57 pagesACES M3 Notes0001 PDFbalajibs203285No ratings yet
- Introduction To Embedded Systems Session - ViDocument26 pagesIntroduction To Embedded Systems Session - Vibalajibs203285No ratings yet
- Sri Sairam College of EngineeringDocument5 pagesSri Sairam College of Engineeringbalajibs203285No ratings yet
- Embedded System Components: Module-3Document40 pagesEmbedded System Components: Module-3balajibs203285No ratings yet
- Introduction To Embedded Systems Session - IvDocument17 pagesIntroduction To Embedded Systems Session - Ivbalajibs203285No ratings yet
- Introduction To Embedded Systems Module - 3Document30 pagesIntroduction To Embedded Systems Module - 3balajibs203285No ratings yet
- HDL LAB Manual - OneDocument93 pagesHDL LAB Manual - Onebalajibs203285No ratings yet
- Introduction To Embedded Systems Session - ViiDocument15 pagesIntroduction To Embedded Systems Session - Viibalajibs203285No ratings yet
- Balaji Conference PaperDocument6 pagesBalaji Conference Paperbalajibs203285No ratings yet
- Introduction To Embedded Systems Session - IiiDocument11 pagesIntroduction To Embedded Systems Session - Iiibalajibs203285No ratings yet
- Introduction To Embedded Systems Session - IiDocument14 pagesIntroduction To Embedded Systems Session - Iibalajibs203285No ratings yet
- VTU Distribution of Marks For M.tech and Be ProjectDocument2 pagesVTU Distribution of Marks For M.tech and Be Projectbalajibs203285No ratings yet
- Wireless Paging Using Zigbee in Wireless Personal Area Network (Wpan)Document4 pagesWireless Paging Using Zigbee in Wireless Personal Area Network (Wpan)balajibs203285No ratings yet
- Microwave & Radar (10ec54) Problems. Keep It Ready and Study Well. All The Best. Microwave and Radar (Questions) June/July 2016 (10EC54)Document11 pagesMicrowave & Radar (10ec54) Problems. Keep It Ready and Study Well. All The Best. Microwave and Radar (Questions) June/July 2016 (10EC54)balajibs203285No ratings yet
- Format For Submission of UG/PG Project ReportDocument1 pageFormat For Submission of UG/PG Project Reportbalajibs203285No ratings yet
- Integrated Solar Energy Harvesting and Storage: Balaji B.S. I Semester, M.Tech SJBIT, Bangalore - 60Document22 pagesIntegrated Solar Energy Harvesting and Storage: Balaji B.S. I Semester, M.Tech SJBIT, Bangalore - 60balajibs203285No ratings yet
- RTS QPDocument6 pagesRTS QPbalajibs203285No ratings yet
- Current Source and SinkDocument3 pagesCurrent Source and Sinkbalajibs203285No ratings yet
- THC enDocument8 pagesTHC enchompink6900No ratings yet
- Investigation of Two MPPT Techniques For Solar PV System-A Comparative AnalysisDocument5 pagesInvestigation of Two MPPT Techniques For Solar PV System-A Comparative AnalysiserpublicationNo ratings yet
- Kenwood SpeakerDocument2 pagesKenwood Speakerlogistics1949No ratings yet
- UC625 Instruction Manual Rev 20Document69 pagesUC625 Instruction Manual Rev 20freddysh4330No ratings yet
- Internal Voltages of Loaded Machines Under Fault Conditions: I JX V EDocument29 pagesInternal Voltages of Loaded Machines Under Fault Conditions: I JX V EDipta DuttaNo ratings yet
- BFGS User Manual 6Document17 pagesBFGS User Manual 6hevenessa0% (1)
- Plasma Pioneer Pdp-433peDocument108 pagesPlasma Pioneer Pdp-433peMaya Tes100% (1)
- 41hz Audio Ai Amp 1bDocument13 pages41hz Audio Ai Amp 1bCotie JonesNo ratings yet
- Make Life Electric: Niumobilityindonesia Niumobilityindonesia Niuindonesia - IdDocument12 pagesMake Life Electric: Niumobilityindonesia Niumobilityindonesia Niuindonesia - IdImonix RofNo ratings yet
- AP2610-20 - Install 9034544-01Document2 pagesAP2610-20 - Install 9034544-01CartoonXNo ratings yet
- Vocabulario Tecnico de HerramientasDocument8 pagesVocabulario Tecnico de HerramientasEMMANUEL MARTINEZ BUENONo ratings yet
- 2010 Edition Power Cables and Wires Technical Manual PDFDocument183 pages2010 Edition Power Cables and Wires Technical Manual PDFbigbang100% (1)
- Qcs 2014 - Sec21 p4 - Motor StartersDocument6 pagesQcs 2014 - Sec21 p4 - Motor StarterschandraNo ratings yet
- 1035 Press Laminating Machine 1 - P61A-L42N V1.0 - ENGDocument285 pages1035 Press Laminating Machine 1 - P61A-L42N V1.0 - ENGHugo Enrique Ramirez RamirezNo ratings yet
- Assignment by Electrical Mentor: Author: BNSS Shankar, M.Tech (IITK)Document12 pagesAssignment by Electrical Mentor: Author: BNSS Shankar, M.Tech (IITK)anjaneyuluNo ratings yet
- P Ch-15 Electrostatic+Potential+and+CapacitanceDocument10 pagesP Ch-15 Electrostatic+Potential+and+Capacitancemysoftinfo.incNo ratings yet
- EIM 2nd Quarter ExamDocument4 pagesEIM 2nd Quarter ExamAura Gahera100% (1)
- VOL V-Electrical PDFDocument450 pagesVOL V-Electrical PDFGenci GjergjaniNo ratings yet
- s1957 Mru Main PanelDocument2 pagess1957 Mru Main PanelMOHIT SHARMANo ratings yet
- 8RY 800 001-SF6密度继电器说明书 (ABB)Document8 pages8RY 800 001-SF6密度继电器说明书 (ABB)Trần Văn HiếuNo ratings yet
- Proportional Directional Valves, Pilot Operated, With Electrical Position Feedback and Integrated Electronics (OBE)Document24 pagesProportional Directional Valves, Pilot Operated, With Electrical Position Feedback and Integrated Electronics (OBE)Jose Antonio Martinez PasionNo ratings yet
- Sunways STS-7 - 11KTL DatasheetDocument2 pagesSunways STS-7 - 11KTL DatasheetLone RangerNo ratings yet
- Clause 7.2.8. Enclosure Tightness Test at Ambient TemperatureDocument1 pageClause 7.2.8. Enclosure Tightness Test at Ambient Temperaturelnhoang.fgroupNo ratings yet
- PCS 902 CatalogueDocument3 pagesPCS 902 CatalogueMạc DavidNo ratings yet
- L-4 (DK) (Pe) ( (Ee) Nptel) 1Document5 pagesL-4 (DK) (Pe) ( (Ee) Nptel) 1GagneNo ratings yet
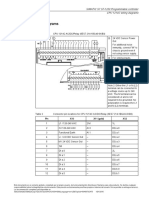
- SIMATIC S7 S7-1200 Programmable Controller - CPU 1214C Wiring DiagramsDocument4 pagesSIMATIC S7 S7-1200 Programmable Controller - CPU 1214C Wiring DiagramsJavier Barberis50% (4)
- TC Electronic Blood Moon PhaserDocument2 pagesTC Electronic Blood Moon PhaserMac MiñaNo ratings yet