Download as pptx, pdf, or txt
You might also like
- Chapter 1 - Real NumbersDocument18 pagesChapter 1 - Real Numbersdeep_72No ratings yet
- 9.3-4: Phase Plane PortraitsDocument9 pages9.3-4: Phase Plane PortraitsAnonymous XgZHEFQdNo ratings yet
- Solving Equations Unit PlanDocument10 pagesSolving Equations Unit Planapi-253299522No ratings yet
- (Vasile Cîrtoaje) Mathematical Inequalities Vol 2Document477 pages(Vasile Cîrtoaje) Mathematical Inequalities Vol 2Gheorghe Lobonţ100% (1)
- Rational Functions Lesson PlanDocument4 pagesRational Functions Lesson Planapi-40167813467% (3)
- Combinatorics Problem SetDocument4 pagesCombinatorics Problem Setdoney_78100% (1)
- Chap 2Document58 pagesChap 2Breezy Buzy OnNo ratings yet
- Chap 2 Nonlinear Finite Element Analysis Procedures: Nam-Ho KimDocument55 pagesChap 2 Nonlinear Finite Element Analysis Procedures: Nam-Ho KimVijay Kumar PolimeruNo ratings yet
- Chap 2 Nonlinear Finite Element Analysis Procedures: Nam-Ho KimDocument55 pagesChap 2 Nonlinear Finite Element Analysis Procedures: Nam-Ho KimSarah CrawfordNo ratings yet
- MEF en Mécanique Non Linéaire Chapitre 1: Non-Linéarité en MécaniqueDocument48 pagesMEF en Mécanique Non Linéaire Chapitre 1: Non-Linéarité en MécaniqueChiheb BaNo ratings yet
- MEF en Mécanique Non Linéaire: Khalil - Mansouri@enit - Utm.tnDocument36 pagesMEF en Mécanique Non Linéaire: Khalil - Mansouri@enit - Utm.tnChiheb BaNo ratings yet
- 12 FemDocument84 pages12 FemLohit BattuNo ratings yet
- Chapter 1c - Mech ProperDocument63 pagesChapter 1c - Mech PropermaiNo ratings yet
- 8 FieldsDocument17 pages8 FieldsSuvankar DasNo ratings yet
- Sbe10 10 Simple RegressionDocument100 pagesSbe10 10 Simple RegressionRAMANo ratings yet
- Lecture 3 FEAShapeFunctions1DDocument24 pagesLecture 3 FEAShapeFunctions1DatilolaNo ratings yet
- Stability of Nonlinear SystemsDocument34 pagesStability of Nonlinear SystemsAmgad_A_Salama_239No ratings yet
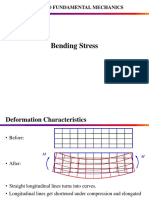
- Bending Stress PDFDocument26 pagesBending Stress PDFRio ChanNo ratings yet
- Vibrations of Continuous SystemsDocument27 pagesVibrations of Continuous SystemslalbaghNo ratings yet
- Singular Value DecompositionDocument24 pagesSingular Value DecompositionDevansh DwivediNo ratings yet
- Linear Regression PartADocument34 pagesLinear Regression PartAAkshay kashyapNo ratings yet
- Chap 3 FEA For Nonlinear Elastic Problems: Nam-Ho KimDocument137 pagesChap 3 FEA For Nonlinear Elastic Problems: Nam-Ho KimBruno RibeiroNo ratings yet
- Euler Bernoulli EquationDocument16 pagesEuler Bernoulli EquationBoon FuiNo ratings yet
- Fundamentals of Engineering Review For Dynamics: Dr.'s Yannitell (Retired) & DR Waggenspack Mewagg@me - Lsu.eduDocument43 pagesFundamentals of Engineering Review For Dynamics: Dr.'s Yannitell (Retired) & DR Waggenspack Mewagg@me - Lsu.eduLalo RubioNo ratings yet
- Chap 3Document137 pagesChap 3Breezy Buzy OnNo ratings yet
- Simple Linear RegressionDocument43 pagesSimple Linear RegressionLiona PatriciaNo ratings yet
- Classification by EigenvaluesDocument6 pagesClassification by EigenvaluessandorNo ratings yet
- Deleted Tpoics in MathDocument1 pageDeleted Tpoics in MathGaurav Kumar YadavNo ratings yet
- Lec4 Numerical ModelDocument26 pagesLec4 Numerical ModelNoorLiana MahmudNo ratings yet
- Deflection of BeamsDocument29 pagesDeflection of Beamsyarendogan360No ratings yet
- RegressionDocument3 pagesRegressionrohitpatil222No ratings yet
- Curve FittingDocument48 pagesCurve FittingNi Putu Indira MelilaNo ratings yet
- Development of Beam EquationsDocument61 pagesDevelopment of Beam Equations4091 Varun SharmaNo ratings yet
- Dynamic Analysis Using FeaDocument114 pagesDynamic Analysis Using FeaDr P Ravinder ReddyNo ratings yet
- Differential Equations: Also Known As Engineering Analysis or EngianaDocument66 pagesDifferential Equations: Also Known As Engineering Analysis or EngianaPatrice Pauline TamoriaNo ratings yet
- Femppt 130313204553 Phpapp01Document38 pagesFemppt 130313204553 Phpapp01srinivasNo ratings yet
- Lec21 EdgeDetectionDocument45 pagesLec21 EdgeDetectionAbburi KumarNo ratings yet
- Regression: Building Experimental ModelsDocument47 pagesRegression: Building Experimental ModelsOnur KirpiciNo ratings yet
- Trigonometric Fourier Series: - OutlineDocument23 pagesTrigonometric Fourier Series: - OutlineBoy KerenzNo ratings yet
- Simple RegressionDocument27 pagesSimple Regressionalemu ayeneNo ratings yet
- 1-Stress and Deflection PresentationDocument25 pages1-Stress and Deflection PresentationJulien ChanNo ratings yet
- Singular Value DecompositionDocument24 pagesSingular Value DecompositionGurleen KaurNo ratings yet
- Chap 4 Finite Element Analysis of Beams and FramesDocument45 pagesChap 4 Finite Element Analysis of Beams and FramesBejil ShresthaNo ratings yet
- Lecture 1-IntroductionDocument7 pagesLecture 1-Introductionelkhouly882No ratings yet
- Least Squares: ORE 766 Numerical Methods in Ocean Engineering Instructor: Eva Marie NosalDocument24 pagesLeast Squares: ORE 766 Numerical Methods in Ocean Engineering Instructor: Eva Marie NosalDenis Constantin Ilie-AblachimNo ratings yet
- Beam and FramesDocument70 pagesBeam and Framesbhetuwalamrit17No ratings yet
- Topic 3BDocument75 pagesTopic 3BMuhammad Hamza Bin TahirNo ratings yet
- 18 Kinematics PDFDocument8 pages18 Kinematics PDFWR ciptoNo ratings yet
- Sessions 18 19 - Regression - SLR MLRDocument70 pagesSessions 18 19 - Regression - SLR MLRjeevanboda.738No ratings yet
- Laplace Transform and Its Application: Prepare By: Mayur PrajapatiDocument24 pagesLaplace Transform and Its Application: Prepare By: Mayur Prajapatifares noureddineNo ratings yet
- ME2 Class Test 1 Sample & Solns0Document6 pagesME2 Class Test 1 Sample & Solns0kakaNo ratings yet
- Stability and Instability of Solitons in Inhomogeneous MediaDocument95 pagesStability and Instability of Solitons in Inhomogeneous MediaAgus Dwi PriyantoNo ratings yet
- Lecture 4Document107 pagesLecture 4Kedir ShiferawNo ratings yet
- Robotics: Fall Semester 2019Document23 pagesRobotics: Fall Semester 2019Saad Ikram CheemaNo ratings yet
- chp7 PDFDocument21 pageschp7 PDFDaniel 01No ratings yet
- Menter RANSDocument57 pagesMenter RANSMohamed OudaNo ratings yet
- LSDYNA Basic NotesDocument83 pagesLSDYNA Basic NotesJayDeep Khajure100% (1)
- Correlation & RegressionDocument24 pagesCorrelation & RegressionAnsh TalwarNo ratings yet
- Vision8featureextraction 28harris Sift 29Document42 pagesVision8featureextraction 28harris Sift 29Muhammad Ikmal Bin MudaNo ratings yet
- 2017 Level II SS 3 Quantitative Methods (Lecture)Document10 pages2017 Level II SS 3 Quantitative Methods (Lecture)haoyuting426No ratings yet
- Laplace Transform and Its Application: Prepare By: Mayur PrajapatiDocument24 pagesLaplace Transform and Its Application: Prepare By: Mayur PrajapatiNirmal PanchalNo ratings yet
- Laplace TransformDocument7 pagesLaplace TransformTpk TpkNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Quarter Plan ActivitiesfinalDocument7 pagesQuarter Plan ActivitiesfinalVanessa Pangan KellerNo ratings yet
- Assignment Unit 6 LESSON 7 Using Inverse Properties To Simplify and Graphing Parent Logarithmic Functions-1Document2 pagesAssignment Unit 6 LESSON 7 Using Inverse Properties To Simplify and Graphing Parent Logarithmic Functions-1Haley VogtNo ratings yet
- HW 6Document3 pagesHW 6dunglh.bi12-108No ratings yet
- Significant Figures (Definition, Examples, Types, Rules, Rounding Off)Document14 pagesSignificant Figures (Definition, Examples, Types, Rules, Rounding Off)Aftab AhmadNo ratings yet
- SG Bab 06 MM F1Document3 pagesSG Bab 06 MM F1ALLYZA BINTI MOHAMED ADIB MoeNo ratings yet
- Locally Compact GroupsDocument49 pagesLocally Compact GroupsMojano De la MagdalenaNo ratings yet
- Solutions - A Concise Course in Algebraic TopologyDocument12 pagesSolutions - A Concise Course in Algebraic TopologyNoel BantonNo ratings yet
- Comparison Between Genetic Algorithms and Particle Swarm OptimizationDocument2 pagesComparison Between Genetic Algorithms and Particle Swarm OptimizationGNANAPRAKASHNo ratings yet
- Revision Test 1Document2 pagesRevision Test 1vrinda dandwaniNo ratings yet
- Topology & Metric Space Pi AIM-1Document110 pagesTopology & Metric Space Pi AIM-1rahul0% (1)
- Faculty of Computer Science and Information Technology: Algebra (BIC10303)Document4 pagesFaculty of Computer Science and Information Technology: Algebra (BIC10303)HuayszeNo ratings yet
- Keypoints Algebra 1 ADocument3 pagesKeypoints Algebra 1 AtnezkiNo ratings yet
- Crazy DerivativesDocument4 pagesCrazy Derivativesapi-249709617No ratings yet
- Ee5121 Tutorial 1Document2 pagesEe5121 Tutorial 1ananNo ratings yet
- Questions and Answers PrecalculusDocument273 pagesQuestions and Answers PrecalculusOrlando Mota100% (1)
- MSC MathDocument18 pagesMSC MathHafeez Khan TareenNo ratings yet
- Discrete Structures: The Basics of CountingDocument82 pagesDiscrete Structures: The Basics of CountingRaniya MuqadasNo ratings yet
- SHMDocument8 pagesSHMSamindra AthavaNo ratings yet
- Full Download Book Engineering Mathematics I PDFDocument41 pagesFull Download Book Engineering Mathematics I PDFjohn.jackson254100% (24)
- Math PeriodicalDocument2 pagesMath PeriodicalleicatapangNo ratings yet
- ECON 4035 - Excel GuideDocument13 pagesECON 4035 - Excel GuideRosario Rivera NegrónNo ratings yet
- About The Cover Euler and The Konigsberg Bridges ADocument8 pagesAbout The Cover Euler and The Konigsberg Bridges AKashito's VinhNo ratings yet
- Chapter 10-REDUCTION BLOCK DIAGRAMDocument14 pagesChapter 10-REDUCTION BLOCK DIAGRAMpnroslinda91% (23)
- 2201 07346Document6 pages2201 07346MarcyNo ratings yet
- 2015 WQ Cs 171 Quiz 4Document2 pages2015 WQ Cs 171 Quiz 4amsdfiNo ratings yet