
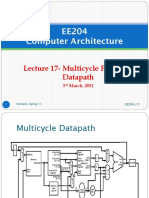
Multicycle Approach Part 2
Multicycle Approach Part 2
You might also like
- TX TagDocument3 pagesTX TagrwoodzzNo ratings yet
- DJM-750MK2: DJ MixerDocument66 pagesDJM-750MK2: DJ MixerPaul CampbellNo ratings yet
- EE-2110 - Formula Sheet: RLC Circuit (Natural Response)Document2 pagesEE-2110 - Formula Sheet: RLC Circuit (Natural Response)vinodkkeee100% (1)
- Solution Manual For LabVIEW For Engineers 136094295 PDFDocument12 pagesSolution Manual For LabVIEW For Engineers 136094295 PDFAyesha TahirNo ratings yet
- Liebherr Parts CatalogDocument615 pagesLiebherr Parts CatalogAnonymous HMRzHd80% (5)
- RTN For SRC Instructions 1-BusDocument5 pagesRTN For SRC Instructions 1-Busprofessor_cuongNo ratings yet
- QRC0001H RVCT v2.1 ThumbDocument4 pagesQRC0001H RVCT v2.1 ThumbhisriharibabuNo ratings yet
- Gas-Insulated Switchgear (GIS) : All Rights ReservedDocument24 pagesGas-Insulated Switchgear (GIS) : All Rights ReservedSARAVANANo ratings yet
- Computer Organization: Engr. Sana ElahiDocument24 pagesComputer Organization: Engr. Sana ElahiAyesha TahirNo ratings yet
- Arm Instruction 2 - 001Document26 pagesArm Instruction 2 - 001Ankit SanghviNo ratings yet
- L02 Branch Prediction V2021Document82 pagesL02 Branch Prediction V2021fjuopregheru5734No ratings yet
- CS 61C: Great Ideas in Computer Architecture Lecture 13: PipeliningDocument47 pagesCS 61C: Great Ideas in Computer Architecture Lecture 13: Pipelininganon_192140810No ratings yet
- Basic Computer OrganizationInstruction CycleDocument8 pagesBasic Computer OrganizationInstruction CycleHARI HARAN REDDYNo ratings yet
- Flowchart 16Document4 pagesFlowchart 16amit1650No ratings yet
- LCD162C# DatenblattDocument8 pagesLCD162C# Datenblattgeorgschmied100% (1)
- SImple CPU DesignDocument19 pagesSImple CPU DesignMustafa NasserNo ratings yet
- Multicycle DatapathDocument23 pagesMulticycle DatapathGIRINATH RNo ratings yet
- This DatapathDocument15 pagesThis DatapathSadaf HameedNo ratings yet
- Basic Computer OrganizationTiming and Control UnitDocument12 pagesBasic Computer OrganizationTiming and Control UnitHARI HARAN REDDYNo ratings yet
- 3 RISC + PipelinesDocument55 pages3 RISC + PipelinesOanaMaria92100% (1)
- Report Lab 7Document4 pagesReport Lab 7DUY VÕ BẢONo ratings yet
- TT8 5 DisintegrateDocument143 pagesTT8 5 DisintegrateAnkit AggarwalNo ratings yet
- CM MipsDocument8 pagesCM MipsBelaid ZinbiNo ratings yet
- Chapter SevenDocument29 pagesChapter Sevenremi1989No ratings yet
- Preparation For MidtermDocument30 pagesPreparation For MidtermTNo ratings yet
- L3-L4 MIPS AssemblyDocument27 pagesL3-L4 MIPS Assemblyf20212909No ratings yet
- 2005 Spring Exam2 SolDocument6 pages2005 Spring Exam2 SolNipun HarshaNo ratings yet
- Riscv User IsaDocument9 pagesRiscv User IsaNita EduardNo ratings yet
- Experiment 1: Pre-Lab Report: 1) Orcad SimulationDocument19 pagesExperiment 1: Pre-Lab Report: 1) Orcad SimulationasmaaNo ratings yet
- Statika Excel BagusDocument11 pagesStatika Excel BagusWindiNo ratings yet
- 4 GLM 24064Document19 pages4 GLM 24064api-3700809No ratings yet
- DatasheetDocument248 pagesDatasheetRajesh MauryaNo ratings yet
- Lecture 21Document10 pagesLecture 21VINAYNo ratings yet
- Lutz ModificationDocument4 pagesLutz Modificationivan bolañosNo ratings yet
- 4 - Processor (Multi Cycle)Document42 pages4 - Processor (Multi Cycle)xuanzzkNo ratings yet
- FA21 Lec16 2021-11-06 UART ProgrammingDocument17 pagesFA21 Lec16 2021-11-06 UART ProgrammingMahreenNo ratings yet
- Ac PDFDocument192 pagesAc PDFAnkan BhuniaNo ratings yet
- Risc-16 Sequential ImplementationDocument11 pagesRisc-16 Sequential ImplementationlamtalsiNo ratings yet
- Falcon-E: Introduction: (I.e., 4 Byte Chunks)Document61 pagesFalcon-E: Introduction: (I.e., 4 Byte Chunks)hamza abbasNo ratings yet
- Department of Collegiate and Technical Education: ARM Controller (V Semester) Electronics & Communication EngineeringDocument34 pagesDepartment of Collegiate and Technical Education: ARM Controller (V Semester) Electronics & Communication EngineeringAbhishek G MNo ratings yet
- HW2 Carch 2023 SolDocument7 pagesHW2 Carch 2023 SolSXNo ratings yet
- Electrical 4Document2 pagesElectrical 4Puran Singh LabanaNo ratings yet
- EE-2110 - Formula SheetDocument2 pagesEE-2110 - Formula Sheetberickson_14No ratings yet
- Electrical and Computer Engineering Department CPE 221 01 Test 2 Solution Spring 2016Document5 pagesElectrical and Computer Engineering Department CPE 221 01 Test 2 Solution Spring 2016Kyra LathonNo ratings yet
- Cs61c 2022fa l12 Risc V Formats IIDocument36 pagesCs61c 2022fa l12 Risc V Formats IIa11718phatNo ratings yet
- Lec17-Multicycle Processor DatapathDocument21 pagesLec17-Multicycle Processor DatapathAnonymous tbEoUfvNo ratings yet
- LCD DatasheetDocument17 pagesLCD DatasheetJuan SánchezNo ratings yet
- TUTORIAL 5 Datapath For R Format, I Format and J Format: For ALU, Load/store, Branch and JumpDocument1 pageTUTORIAL 5 Datapath For R Format, I Format and J Format: For ALU, Load/store, Branch and JumpEric LeonardoNo ratings yet
- Mchunu Lindokuhle CO2 Pre-PracDocument10 pagesMchunu Lindokuhle CO2 Pre-PracLungani MthethwaNo ratings yet
- RiSC PipeDocument9 pagesRiSC PipeAir Oddy Air OddyNo ratings yet
- The University of Alabama in Huntsville: r2 r1 Not r1, r2Document5 pagesThe University of Alabama in Huntsville: r2 r1 Not r1, r2Kyra LathonNo ratings yet
- Lect 07 Processordesign PDFDocument55 pagesLect 07 Processordesign PDFMo LêNo ratings yet
- An Instructional Processor Design Using VHDL and An FpgaDocument10 pagesAn Instructional Processor Design Using VHDL and An FpgaRezwan KhanNo ratings yet
- Exp-9 RLCDocument2 pagesExp-9 RLCSwaroop MallickNo ratings yet
- TI TI: PLC Modem PLC ModemDocument9 pagesTI TI: PLC Modem PLC ModemHyundianto AgNo ratings yet
- ARM 16thumb InstructionSet PDFDocument3 pagesARM 16thumb InstructionSet PDFGabriel Rivera MoralesNo ratings yet
- Product Specifications: Displaytech LTDDocument20 pagesProduct Specifications: Displaytech LTDPwter KovacsNo ratings yet
- Fetch-Execute Cycle: Minggu 1 Arsitektur KomputerDocument12 pagesFetch-Execute Cycle: Minggu 1 Arsitektur KomputerRyan SaputraNo ratings yet
- 07-12-16 - SR - IIT-IZ-CO-SPARK - RPTA-13 - 2015 - P1 - Key & Sol'sDocument13 pages07-12-16 - SR - IIT-IZ-CO-SPARK - RPTA-13 - 2015 - P1 - Key & Sol'sfocusonyourgoaldreamiitbombayNo ratings yet
- FFT Imp ButterflyDocument14 pagesFFT Imp ButterflyFarhaNazneenNo ratings yet
- Midterm Solutions Mar 30Document6 pagesMidterm Solutions Mar 30Sahil SethNo ratings yet
- VSD 2021 HW1 Explanation Ver1.2Document24 pagesVSD 2021 HW1 Explanation Ver1.2N26112372崔哲瑋No ratings yet
- ROUTING INFORMATION PROTOCOL: RIP DYNAMIC ROUTING LAB CONFIGURATIONFrom EverandROUTING INFORMATION PROTOCOL: RIP DYNAMIC ROUTING LAB CONFIGURATIONNo ratings yet
- Digital Signal ProcessingDocument39 pagesDigital Signal ProcessingAyesha TahirNo ratings yet
- Cloud ComputingDocument24 pagesCloud ComputingAyesha TahirNo ratings yet
- Quiz 2 Solution Solve Following MCQS: (Clo 2) (Plo 2) (10 Marks)Document2 pagesQuiz 2 Solution Solve Following MCQS: (Clo 2) (Plo 2) (10 Marks)Ayesha TahirNo ratings yet
- CH4 Special-Purpose DiodesDocument28 pagesCH4 Special-Purpose DiodesAyesha TahirNo ratings yet
- Mathematical Statistics: Prof. Dr. M. Junaid MughalDocument24 pagesMathematical Statistics: Prof. Dr. M. Junaid MughalAyesha TahirNo ratings yet
- Chapter 3Document19 pagesChapter 3Ayesha TahirNo ratings yet
- Computer Organization: Engr. Sana ElahiDocument24 pagesComputer Organization: Engr. Sana ElahiAyesha TahirNo ratings yet
- Design Process 1Document23 pagesDesign Process 1Ayesha TahirNo ratings yet
- TVSS UL Spec 1449Document2 pagesTVSS UL Spec 1449nbashir786No ratings yet
- Manual Peugeot 206Document200 pagesManual Peugeot 206galih sputroNo ratings yet
- A400Document112 pagesA400qlab001No ratings yet
- Kenwood VR407 RecDocument40 pagesKenwood VR407 Recv8limitedNo ratings yet
- Micro-Controller 8051 Based Obstacle Avoider RobotDocument17 pagesMicro-Controller 8051 Based Obstacle Avoider RobotMirza Abdul Waris40% (5)
- Juk - DLN 5410N 7Document36 pagesJuk - DLN 5410N 7RHoskaNo ratings yet
- Schiller Intertrack 8100t 8100td 8100 D Brochure SpecsDocument2 pagesSchiller Intertrack 8100t 8100td 8100 D Brochure SpecsSergio PérezNo ratings yet
- Open & Short Circuit TestDocument8 pagesOpen & Short Circuit Testmaheswari MNo ratings yet
- Centrifugal Horizontal Volute Casing Pumps Series NT According To DIN EN 733Document29 pagesCentrifugal Horizontal Volute Casing Pumps Series NT According To DIN EN 733شادي العزبيNo ratings yet
- Blower Double Impeller bl520002 Technical Data Sheet en v3Document2 pagesBlower Double Impeller bl520002 Technical Data Sheet en v3Docu CenterNo ratings yet
- Li-Ion Accu ChargerDocument3 pagesLi-Ion Accu ChargervdwuNo ratings yet
- Giacomini PDFDocument52 pagesGiacomini PDFLavzNo ratings yet
- D017/D018/D019 /D020/D084/D085 Service Manual: Downloaded From Manuals Search EngineDocument1,271 pagesD017/D018/D019 /D020/D084/D085 Service Manual: Downloaded From Manuals Search EngineTây ĐặngNo ratings yet
- Design Guide VPLDocument28 pagesDesign Guide VPLKHA120096 StudentNo ratings yet
- Selector Box, Ball and Socket JointsDocument2 pagesSelector Box, Ball and Socket Jointskaswade BrianNo ratings yet
- Bender A-Isometer IR425 User ManualDocument4 pagesBender A-Isometer IR425 User Manualbarroco.polvoaNo ratings yet
- Operating Instructions: Ospa Bluecontrol-Pilot Iii Web Light Control - DMXDocument8 pagesOperating Instructions: Ospa Bluecontrol-Pilot Iii Web Light Control - DMXGentiana FeliciaNo ratings yet
- Technical Report Writing (Exercise)Document2 pagesTechnical Report Writing (Exercise)ZubaidahNo ratings yet
- En Hartox Remote Control RM 90GO! RM 70GO! ManualDocument21 pagesEn Hartox Remote Control RM 90GO! RM 70GO! Manualandrew stablesNo ratings yet
- PM Checklist Quarterly (PM 3 M) : Current DateDocument50 pagesPM Checklist Quarterly (PM 3 M) : Current DateImam HadiNo ratings yet
- Battery Applications & SpecificationsDocument35 pagesBattery Applications & SpecificationsAli mohammadNo ratings yet
- Pareto CAT777E Januari-Maret 2019Document518 pagesPareto CAT777E Januari-Maret 2019SARTONO INDO FRANSNo ratings yet
- MC 10209675 0001Document13 pagesMC 10209675 0001Олег ПетровскийNo ratings yet
- EN 44-3 Dual-Temperature Chillers PlantsDocument12 pagesEN 44-3 Dual-Temperature Chillers PlantsJose Pedro CostaNo ratings yet
- Data Sheet B11R 6x2 Euro 6 EN 2020Document4 pagesData Sheet B11R 6x2 Euro 6 EN 2020Juan Manuel Villanueva uraccahuaNo ratings yet
- BYD SEAL Product GuideDocument35 pagesBYD SEAL Product GuidegeowahahaNo ratings yet
































































































Download as pptx, pdf, or txt
You might also like
- TX TagDocument3 pagesTX TagrwoodzzNo ratings yet
- DJM-750MK2: DJ MixerDocument66 pagesDJM-750MK2: DJ MixerPaul CampbellNo ratings yet
- EE-2110 - Formula Sheet: RLC Circuit (Natural Response)Document2 pagesEE-2110 - Formula Sheet: RLC Circuit (Natural Response)vinodkkeee100% (1)
- Solution Manual For LabVIEW For Engineers 136094295 PDFDocument12 pagesSolution Manual For LabVIEW For Engineers 136094295 PDFAyesha TahirNo ratings yet
- Liebherr Parts CatalogDocument615 pagesLiebherr Parts CatalogAnonymous HMRzHd80% (5)
- RTN For SRC Instructions 1-BusDocument5 pagesRTN For SRC Instructions 1-Busprofessor_cuongNo ratings yet
- QRC0001H RVCT v2.1 ThumbDocument4 pagesQRC0001H RVCT v2.1 ThumbhisriharibabuNo ratings yet
- Gas-Insulated Switchgear (GIS) : All Rights ReservedDocument24 pagesGas-Insulated Switchgear (GIS) : All Rights ReservedSARAVANANo ratings yet
- Computer Organization: Engr. Sana ElahiDocument24 pagesComputer Organization: Engr. Sana ElahiAyesha TahirNo ratings yet
- Arm Instruction 2 - 001Document26 pagesArm Instruction 2 - 001Ankit SanghviNo ratings yet
- L02 Branch Prediction V2021Document82 pagesL02 Branch Prediction V2021fjuopregheru5734No ratings yet
- CS 61C: Great Ideas in Computer Architecture Lecture 13: PipeliningDocument47 pagesCS 61C: Great Ideas in Computer Architecture Lecture 13: Pipelininganon_192140810No ratings yet
- Basic Computer OrganizationInstruction CycleDocument8 pagesBasic Computer OrganizationInstruction CycleHARI HARAN REDDYNo ratings yet
- Flowchart 16Document4 pagesFlowchart 16amit1650No ratings yet
- LCD162C# DatenblattDocument8 pagesLCD162C# Datenblattgeorgschmied100% (1)
- SImple CPU DesignDocument19 pagesSImple CPU DesignMustafa NasserNo ratings yet
- Multicycle DatapathDocument23 pagesMulticycle DatapathGIRINATH RNo ratings yet
- This DatapathDocument15 pagesThis DatapathSadaf HameedNo ratings yet
- Basic Computer OrganizationTiming and Control UnitDocument12 pagesBasic Computer OrganizationTiming and Control UnitHARI HARAN REDDYNo ratings yet
- 3 RISC + PipelinesDocument55 pages3 RISC + PipelinesOanaMaria92100% (1)
- Report Lab 7Document4 pagesReport Lab 7DUY VÕ BẢONo ratings yet
- TT8 5 DisintegrateDocument143 pagesTT8 5 DisintegrateAnkit AggarwalNo ratings yet
- CM MipsDocument8 pagesCM MipsBelaid ZinbiNo ratings yet
- Chapter SevenDocument29 pagesChapter Sevenremi1989No ratings yet
- Preparation For MidtermDocument30 pagesPreparation For MidtermTNo ratings yet
- L3-L4 MIPS AssemblyDocument27 pagesL3-L4 MIPS Assemblyf20212909No ratings yet
- 2005 Spring Exam2 SolDocument6 pages2005 Spring Exam2 SolNipun HarshaNo ratings yet
- Riscv User IsaDocument9 pagesRiscv User IsaNita EduardNo ratings yet
- Experiment 1: Pre-Lab Report: 1) Orcad SimulationDocument19 pagesExperiment 1: Pre-Lab Report: 1) Orcad SimulationasmaaNo ratings yet
- Statika Excel BagusDocument11 pagesStatika Excel BagusWindiNo ratings yet
- 4 GLM 24064Document19 pages4 GLM 24064api-3700809No ratings yet
- DatasheetDocument248 pagesDatasheetRajesh MauryaNo ratings yet
- Lecture 21Document10 pagesLecture 21VINAYNo ratings yet
- Lutz ModificationDocument4 pagesLutz Modificationivan bolañosNo ratings yet
- 4 - Processor (Multi Cycle)Document42 pages4 - Processor (Multi Cycle)xuanzzkNo ratings yet
- FA21 Lec16 2021-11-06 UART ProgrammingDocument17 pagesFA21 Lec16 2021-11-06 UART ProgrammingMahreenNo ratings yet
- Ac PDFDocument192 pagesAc PDFAnkan BhuniaNo ratings yet
- Risc-16 Sequential ImplementationDocument11 pagesRisc-16 Sequential ImplementationlamtalsiNo ratings yet
- Falcon-E: Introduction: (I.e., 4 Byte Chunks)Document61 pagesFalcon-E: Introduction: (I.e., 4 Byte Chunks)hamza abbasNo ratings yet
- Department of Collegiate and Technical Education: ARM Controller (V Semester) Electronics & Communication EngineeringDocument34 pagesDepartment of Collegiate and Technical Education: ARM Controller (V Semester) Electronics & Communication EngineeringAbhishek G MNo ratings yet
- HW2 Carch 2023 SolDocument7 pagesHW2 Carch 2023 SolSXNo ratings yet
- Electrical 4Document2 pagesElectrical 4Puran Singh LabanaNo ratings yet
- EE-2110 - Formula SheetDocument2 pagesEE-2110 - Formula Sheetberickson_14No ratings yet
- Electrical and Computer Engineering Department CPE 221 01 Test 2 Solution Spring 2016Document5 pagesElectrical and Computer Engineering Department CPE 221 01 Test 2 Solution Spring 2016Kyra LathonNo ratings yet
- Cs61c 2022fa l12 Risc V Formats IIDocument36 pagesCs61c 2022fa l12 Risc V Formats IIa11718phatNo ratings yet
- Lec17-Multicycle Processor DatapathDocument21 pagesLec17-Multicycle Processor DatapathAnonymous tbEoUfvNo ratings yet
- LCD DatasheetDocument17 pagesLCD DatasheetJuan SánchezNo ratings yet
- TUTORIAL 5 Datapath For R Format, I Format and J Format: For ALU, Load/store, Branch and JumpDocument1 pageTUTORIAL 5 Datapath For R Format, I Format and J Format: For ALU, Load/store, Branch and JumpEric LeonardoNo ratings yet
- Mchunu Lindokuhle CO2 Pre-PracDocument10 pagesMchunu Lindokuhle CO2 Pre-PracLungani MthethwaNo ratings yet
- RiSC PipeDocument9 pagesRiSC PipeAir Oddy Air OddyNo ratings yet
- The University of Alabama in Huntsville: r2 r1 Not r1, r2Document5 pagesThe University of Alabama in Huntsville: r2 r1 Not r1, r2Kyra LathonNo ratings yet
- Lect 07 Processordesign PDFDocument55 pagesLect 07 Processordesign PDFMo LêNo ratings yet
- An Instructional Processor Design Using VHDL and An FpgaDocument10 pagesAn Instructional Processor Design Using VHDL and An FpgaRezwan KhanNo ratings yet
- Exp-9 RLCDocument2 pagesExp-9 RLCSwaroop MallickNo ratings yet
- TI TI: PLC Modem PLC ModemDocument9 pagesTI TI: PLC Modem PLC ModemHyundianto AgNo ratings yet
- ARM 16thumb InstructionSet PDFDocument3 pagesARM 16thumb InstructionSet PDFGabriel Rivera MoralesNo ratings yet
- Product Specifications: Displaytech LTDDocument20 pagesProduct Specifications: Displaytech LTDPwter KovacsNo ratings yet
- Fetch-Execute Cycle: Minggu 1 Arsitektur KomputerDocument12 pagesFetch-Execute Cycle: Minggu 1 Arsitektur KomputerRyan SaputraNo ratings yet
- 07-12-16 - SR - IIT-IZ-CO-SPARK - RPTA-13 - 2015 - P1 - Key & Sol'sDocument13 pages07-12-16 - SR - IIT-IZ-CO-SPARK - RPTA-13 - 2015 - P1 - Key & Sol'sfocusonyourgoaldreamiitbombayNo ratings yet
- FFT Imp ButterflyDocument14 pagesFFT Imp ButterflyFarhaNazneenNo ratings yet
- Midterm Solutions Mar 30Document6 pagesMidterm Solutions Mar 30Sahil SethNo ratings yet
- VSD 2021 HW1 Explanation Ver1.2Document24 pagesVSD 2021 HW1 Explanation Ver1.2N26112372崔哲瑋No ratings yet
- ROUTING INFORMATION PROTOCOL: RIP DYNAMIC ROUTING LAB CONFIGURATIONFrom EverandROUTING INFORMATION PROTOCOL: RIP DYNAMIC ROUTING LAB CONFIGURATIONNo ratings yet
- Digital Signal ProcessingDocument39 pagesDigital Signal ProcessingAyesha TahirNo ratings yet
- Cloud ComputingDocument24 pagesCloud ComputingAyesha TahirNo ratings yet
- Quiz 2 Solution Solve Following MCQS: (Clo 2) (Plo 2) (10 Marks)Document2 pagesQuiz 2 Solution Solve Following MCQS: (Clo 2) (Plo 2) (10 Marks)Ayesha TahirNo ratings yet
- CH4 Special-Purpose DiodesDocument28 pagesCH4 Special-Purpose DiodesAyesha TahirNo ratings yet
- Mathematical Statistics: Prof. Dr. M. Junaid MughalDocument24 pagesMathematical Statistics: Prof. Dr. M. Junaid MughalAyesha TahirNo ratings yet
- Chapter 3Document19 pagesChapter 3Ayesha TahirNo ratings yet
- Computer Organization: Engr. Sana ElahiDocument24 pagesComputer Organization: Engr. Sana ElahiAyesha TahirNo ratings yet
- Design Process 1Document23 pagesDesign Process 1Ayesha TahirNo ratings yet
- TVSS UL Spec 1449Document2 pagesTVSS UL Spec 1449nbashir786No ratings yet
- Manual Peugeot 206Document200 pagesManual Peugeot 206galih sputroNo ratings yet
- A400Document112 pagesA400qlab001No ratings yet
- Kenwood VR407 RecDocument40 pagesKenwood VR407 Recv8limitedNo ratings yet
- Micro-Controller 8051 Based Obstacle Avoider RobotDocument17 pagesMicro-Controller 8051 Based Obstacle Avoider RobotMirza Abdul Waris40% (5)
- Juk - DLN 5410N 7Document36 pagesJuk - DLN 5410N 7RHoskaNo ratings yet
- Schiller Intertrack 8100t 8100td 8100 D Brochure SpecsDocument2 pagesSchiller Intertrack 8100t 8100td 8100 D Brochure SpecsSergio PérezNo ratings yet
- Open & Short Circuit TestDocument8 pagesOpen & Short Circuit Testmaheswari MNo ratings yet
- Centrifugal Horizontal Volute Casing Pumps Series NT According To DIN EN 733Document29 pagesCentrifugal Horizontal Volute Casing Pumps Series NT According To DIN EN 733شادي العزبيNo ratings yet
- Blower Double Impeller bl520002 Technical Data Sheet en v3Document2 pagesBlower Double Impeller bl520002 Technical Data Sheet en v3Docu CenterNo ratings yet
- Li-Ion Accu ChargerDocument3 pagesLi-Ion Accu ChargervdwuNo ratings yet
- Giacomini PDFDocument52 pagesGiacomini PDFLavzNo ratings yet
- D017/D018/D019 /D020/D084/D085 Service Manual: Downloaded From Manuals Search EngineDocument1,271 pagesD017/D018/D019 /D020/D084/D085 Service Manual: Downloaded From Manuals Search EngineTây ĐặngNo ratings yet
- Design Guide VPLDocument28 pagesDesign Guide VPLKHA120096 StudentNo ratings yet
- Selector Box, Ball and Socket JointsDocument2 pagesSelector Box, Ball and Socket Jointskaswade BrianNo ratings yet
- Bender A-Isometer IR425 User ManualDocument4 pagesBender A-Isometer IR425 User Manualbarroco.polvoaNo ratings yet
- Operating Instructions: Ospa Bluecontrol-Pilot Iii Web Light Control - DMXDocument8 pagesOperating Instructions: Ospa Bluecontrol-Pilot Iii Web Light Control - DMXGentiana FeliciaNo ratings yet
- Technical Report Writing (Exercise)Document2 pagesTechnical Report Writing (Exercise)ZubaidahNo ratings yet
- En Hartox Remote Control RM 90GO! RM 70GO! ManualDocument21 pagesEn Hartox Remote Control RM 90GO! RM 70GO! Manualandrew stablesNo ratings yet
- PM Checklist Quarterly (PM 3 M) : Current DateDocument50 pagesPM Checklist Quarterly (PM 3 M) : Current DateImam HadiNo ratings yet
- Battery Applications & SpecificationsDocument35 pagesBattery Applications & SpecificationsAli mohammadNo ratings yet
- Pareto CAT777E Januari-Maret 2019Document518 pagesPareto CAT777E Januari-Maret 2019SARTONO INDO FRANSNo ratings yet
- MC 10209675 0001Document13 pagesMC 10209675 0001Олег ПетровскийNo ratings yet
- EN 44-3 Dual-Temperature Chillers PlantsDocument12 pagesEN 44-3 Dual-Temperature Chillers PlantsJose Pedro CostaNo ratings yet
- Data Sheet B11R 6x2 Euro 6 EN 2020Document4 pagesData Sheet B11R 6x2 Euro 6 EN 2020Juan Manuel Villanueva uraccahuaNo ratings yet
- BYD SEAL Product GuideDocument35 pagesBYD SEAL Product GuidegeowahahaNo ratings yet