Download as pptx, pdf, or txt
You might also like
- Assignment #1Document1 pageAssignment #1Aly Arquillano JrNo ratings yet
- Vibration Chapter02 Ver2.0Document147 pagesVibration Chapter02 Ver2.0Batuhan GünerNo ratings yet
- Beam Experiment HandoutDocument10 pagesBeam Experiment HandoutArun KumarNo ratings yet
- 1-SD Notes (I) - 1Document78 pages1-SD Notes (I) - 1Aniruddh PansambalNo ratings yet
- SCIA5202Document67 pagesSCIA52022BA19CV059 Rakshita SarangmathNo ratings yet
- Control Chapter 2 8EDocument25 pagesControl Chapter 2 8EE24089046林雯琪No ratings yet
- July 28 - Introduction To Structural Dynamics Dr. HW Huang PDFDocument52 pagesJuly 28 - Introduction To Structural Dynamics Dr. HW Huang PDFurvishNo ratings yet
- A Finite-Element Based Damage Detection Technique For Nonlinear Reinforced Concrete StructuresDocument17 pagesA Finite-Element Based Damage Detection Technique For Nonlinear Reinforced Concrete StructuresMichel Sebastian TreneauNo ratings yet
- Cen 502 End Term (2017) - PrintDocument3 pagesCen 502 End Term (2017) - Printskverma5724No ratings yet
- Structural Dynamics NotesDocument61 pagesStructural Dynamics Noteskpsd58625No ratings yet
- 107 1 NTU SDS 2 1 Fundamental PeriodDocument39 pages107 1 NTU SDS 2 1 Fundamental Period陳俊鴻No ratings yet
- Thvi Lecture 1Document46 pagesThvi Lecture 1Ricky VelascoNo ratings yet
- Waves & Oscillation - DPP 01 (Of Lec 02) - Kshitij 2.0 Physics 2024Document4 pagesWaves & Oscillation - DPP 01 (Of Lec 02) - Kshitij 2.0 Physics 2024Vipul JoshiNo ratings yet
- Smile Dynamics 3Document12 pagesSmile Dynamics 3broletmedownloaditNo ratings yet
- Modeling Viscous Damping in Nonlinear Response History Analysis of BuildingsDocument10 pagesModeling Viscous Damping in Nonlinear Response History Analysis of BuildingsBrahan SevillanoNo ratings yet
- Al Janabi2013Document14 pagesAl Janabi2013Irani GonçalvesNo ratings yet
- Soils - Deformation CalculationDocument28 pagesSoils - Deformation Calculationthomas yapiNo ratings yet
- CE ELECT 3S - Module 4.2 Story Lateral Drifts and Deflections - 380313024Document5 pagesCE ELECT 3S - Module 4.2 Story Lateral Drifts and Deflections - 380313024rance halogNo ratings yet
- Seismology Earthquake: Examination, (7h Semester) Engineering Max. Marks: 100 of Printed AttemptDocument6 pagesSeismology Earthquake: Examination, (7h Semester) Engineering Max. Marks: 100 of Printed Attemptkartikey papnoiNo ratings yet
- SD Unit 2QBDocument17 pagesSD Unit 2QBmkshiran4No ratings yet
- 1.050 Engineering Mechanics: Beam Elasticity - Derivation of Governing EquationDocument7 pages1.050 Engineering Mechanics: Beam Elasticity - Derivation of Governing EquationDilip KumarNo ratings yet
- Practical Training 02Document3 pagesPractical Training 02Sahar Aktham RashedNo ratings yet
- Vibration Ch02 BASHMAL Ver1.0 PDFDocument53 pagesVibration Ch02 BASHMAL Ver1.0 PDFإسماعيل مظفرNo ratings yet
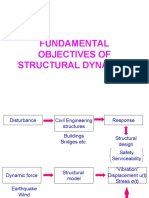
- Fundamental Objectives of Structural DynamicsDocument11 pagesFundamental Objectives of Structural DynamicsikramNo ratings yet
- Chapter 1 - Free VibrationDocument77 pagesChapter 1 - Free VibrationNaftali Junior NaukushuNo ratings yet
- Earthquake Response Analysis of A Gravity Dam Considering The RadiationDocument8 pagesEarthquake Response Analysis of A Gravity Dam Considering The RadiationKevin andres Vivas EscobarNo ratings yet
- 3191531Document16 pages3191531LUIS ISAAC LEON PARONo ratings yet
- Structural Impedance Based Damage Diagnosis by Piezo-TransducersDocument20 pagesStructural Impedance Based Damage Diagnosis by Piezo-TransducersSuman.SNo ratings yet
- Chapter 2 PPT 02Document94 pagesChapter 2 PPT 02No NameNo ratings yet
- Slides.2.dynamics Lund 2017 Tomasi PDFDocument22 pagesSlides.2.dynamics Lund 2017 Tomasi PDFAnil KumarNo ratings yet
- Post Yielding Stiffness WCEEDocument8 pagesPost Yielding Stiffness WCEEFFNo ratings yet
- CEI SD 100 Structural Dynamics LR01newDocument24 pagesCEI SD 100 Structural Dynamics LR01newSahar Aktham RashedNo ratings yet
- Nonlinear Dynamics of A Duffing-Like Negative StifDocument13 pagesNonlinear Dynamics of A Duffing-Like Negative StifPietro TestaNo ratings yet
- CSE40418-Week 1Document70 pagesCSE40418-Week 1Michael WaYNo ratings yet
- ContentServer PDFDocument15 pagesContentServer PDFLUIS ISAAC LEON PARONo ratings yet
- MEMB343 Final Exams 2019-2020-1 PDFDocument8 pagesMEMB343 Final Exams 2019-2020-1 PDFRubanraj RajendrenNo ratings yet
- Bouc-Wen Model of Hysteretic Damping: Procedia Engineering December 2017Document8 pagesBouc-Wen Model of Hysteretic Damping: Procedia Engineering December 2017Jesús Rodríguez RodríguezNo ratings yet
- Seminar Assignments Structural Dynamics AssignmentsDocument38 pagesSeminar Assignments Structural Dynamics Assignmentslithiumabc100% (1)
- Nonlinear Seismic Analysis and Vulnerability Evaluation of A Masonry Building by Means of The SAP2000 (Pasticier, Et Al. 2007)Document19 pagesNonlinear Seismic Analysis and Vulnerability Evaluation of A Masonry Building by Means of The SAP2000 (Pasticier, Et Al. 2007)Jose ManuelNo ratings yet
- No. of Unknown Reactions or Internal Forces No. of Equilibrium EquationsDocument25 pagesNo. of Unknown Reactions or Internal Forces No. of Equilibrium EquationsNawfal AlgheziNo ratings yet
- Nonlinear Impact Response of Doubly Curved Composite ShellsDocument6 pagesNonlinear Impact Response of Doubly Curved Composite ShellsVenkata Swamy Naidu NeigapulaNo ratings yet
- Unit IiDocument17 pagesUnit IiAshlin AarthiNo ratings yet
- FCE 401 Chapter 1 and 2Document34 pagesFCE 401 Chapter 1 and 2carl ingariNo ratings yet
- Acta Technica Napocensis: Evaluation of The Level of Performance For The Vibrating Screens Based On Dynamic ParametersDocument6 pagesActa Technica Napocensis: Evaluation of The Level of Performance For The Vibrating Screens Based On Dynamic ParametersNitu MarilenaNo ratings yet
- Journal of Sound and Vibration 1997 - v199 33-50Document18 pagesJournal of Sound and Vibration 1997 - v199 33-50Franco VillanuevaNo ratings yet
- W08-Mesoscale DynamicsDocument14 pagesW08-Mesoscale DynamicsMuco İboNo ratings yet
- Formulation of Equation of Motion: X - in Order To Identify Forces InducedDocument19 pagesFormulation of Equation of Motion: X - in Order To Identify Forces InducedK Divakara RaoNo ratings yet
- Structural Dynamics Exam - 2008Document5 pagesStructural Dynamics Exam - 2008yusufhargeyNo ratings yet
- Flat Slab by FemDocument8 pagesFlat Slab by Femanuj kumarNo ratings yet
- A New Foundation Model For Dynamic Analysis of Beams On Nonlinear Foundation Subjected To A Moving MassDocument8 pagesA New Foundation Model For Dynamic Analysis of Beams On Nonlinear Foundation Subjected To A Moving MassLUIS DIEGO PANTOJA HORNANo ratings yet
- Timoshenko Beam Theory Exact Solution For Bending, Second-Order Analysis, and StabilityDocument22 pagesTimoshenko Beam Theory Exact Solution For Bending, Second-Order Analysis, and StabilityTrươngVănMếnNo ratings yet
- Scs 2004004Document12 pagesScs 2004004daisymanuval1998No ratings yet
- CalibofMag 2012 PDFDocument4 pagesCalibofMag 2012 PDFShrikant RaoNo ratings yet
- Seismic Behavior of Long-Span Connected Structures Under Multi-Supported and Multi-Dimensional Earthquake ExcitationsDocument6 pagesSeismic Behavior of Long-Span Connected Structures Under Multi-Supported and Multi-Dimensional Earthquake Excitationsgorgika papandNo ratings yet
- Consistent Mass MatrixDocument56 pagesConsistent Mass MatrixRamesh GantiNo ratings yet
- (Lecture - 1) Dynamics of Structures Chapter 1Document40 pages(Lecture - 1) Dynamics of Structures Chapter 1Masood Ahmed50% (2)
- 13 PisanoDocument124 pages13 PisanoArgaardNo ratings yet
- Considerations in The Design of Passive Active andDocument9 pagesConsiderations in The Design of Passive Active andAya KhalifaNo ratings yet
- Análisis Comparativo de Dos Modelos para Análisis SísmicoDocument5 pagesAnálisis Comparativo de Dos Modelos para Análisis SísmicoYorman LPNo ratings yet
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11From EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11No ratings yet
- 3 Secondary Recovery (1) .PPT Ok OkDocument36 pages3 Secondary Recovery (1) .PPT Ok OkEslam Atif AzkolNo ratings yet
- Theodolite Traversing, Purpose and Principles of Theodolite TraversingDocument15 pagesTheodolite Traversing, Purpose and Principles of Theodolite Traversingsiyamsanker100% (1)
- Plasma 120 SDocument36 pagesPlasma 120 SRade RadojkovicNo ratings yet
- 143 749 Specification Sheet Multiphase Wet Gas Meter 1Document2 pages143 749 Specification Sheet Multiphase Wet Gas Meter 1YLW-BEKASINo ratings yet
- Thermozorb Heatless Regenerative Air Dryer: TZ22 - TZ142Document2 pagesThermozorb Heatless Regenerative Air Dryer: TZ22 - TZ142Емил ГавриловNo ratings yet
- Power Generation by Using Piezoelectric Transducer With Bending Mechanism SupportDocument6 pagesPower Generation by Using Piezoelectric Transducer With Bending Mechanism SupportIAES IJPEDSNo ratings yet
- MTC PipeDocument1 pageMTC PipeMathavan ABMNo ratings yet
- Local Buckling Tests On Cold-Formed Steel Beams by Yu 2003Document11 pagesLocal Buckling Tests On Cold-Formed Steel Beams by Yu 2003fahmi aballiNo ratings yet
- LSS A286Document2 pagesLSS A286anhntran4850No ratings yet
- Solid Dispersion PolymorphismDocument37 pagesSolid Dispersion PolymorphismAmey KamtheNo ratings yet
- Lesson Plan in Uniqueness of EarthDocument2 pagesLesson Plan in Uniqueness of EarthAnn NecdoteNo ratings yet
- Amity International School Noida Science RevisionDocument4 pagesAmity International School Noida Science RevisionArchanaGuptaNo ratings yet
- Brochure UCL ENG 2018Document12 pagesBrochure UCL ENG 2018ashumishra007No ratings yet
- HW - 7 Sol PDFDocument10 pagesHW - 7 Sol PDFrailgunNo ratings yet
- Excalibur 308/308H-16, 308L-16Document2 pagesExcalibur 308/308H-16, 308L-16Swapnil ModakNo ratings yet
- Plane Stress LoadingDocument19 pagesPlane Stress LoadingAjeet Kumar100% (1)
- Modifying The Physicochemical and Electrical PDocument6 pagesModifying The Physicochemical and Electrical PW ZuoNo ratings yet
- Design of Shaft PDFDocument5 pagesDesign of Shaft PDFAnonymous oTrMzaNo ratings yet
- Distillation Processes: June 2014Document29 pagesDistillation Processes: June 2014Najmi NasirNo ratings yet
- Introducing VRayDocument69 pagesIntroducing VRaymariusfar1No ratings yet
- Journal of Alloys and Compounds: Dongyu Fang, Kui Lin, Tao Xue, Can Cui, Xiaoping Chen, Pei Yao, Huijun LiDocument7 pagesJournal of Alloys and Compounds: Dongyu Fang, Kui Lin, Tao Xue, Can Cui, Xiaoping Chen, Pei Yao, Huijun LiMurtaza SieamNo ratings yet
- Ship Hull Vibration NAME 431Document17 pagesShip Hull Vibration NAME 431Ashik Mahmud TuhinNo ratings yet
- Development of High Torque Gear Using Powder MetallurgyDocument13 pagesDevelopment of High Torque Gear Using Powder MetallurgyArunKumarNo ratings yet
- 15A03602 Design of Machine Members - IIDocument2 pages15A03602 Design of Machine Members - IIJagannath CherkuNo ratings yet
- Structural Solutions of Wood-Concrete Floors UsingDocument13 pagesStructural Solutions of Wood-Concrete Floors UsingRasak AdepojuNo ratings yet
- H2 EmbrittlementDocument57 pagesH2 EmbrittlementrodneyrlrNo ratings yet
- Exploration of Crude PetroleumDocument13 pagesExploration of Crude PetroleumUsman IsrarNo ratings yet
- Beam DeflectionDocument30 pagesBeam DeflectiontruptiNo ratings yet
- TT XXDocument5 pagesTT XXAsees SachdevNo ratings yet
- Models - Mixer.centrifugal PumpDocument22 pagesModels - Mixer.centrifugal Pumpcarlos tNo ratings yet