
Chapter4 Description of Systems - Menos
Chapter4 Description of Systems - Menos
You might also like
- Kathrein Antenna Dual BandDocument4 pagesKathrein Antenna Dual BandAmine AchrafNo ratings yet
- Chapter 4Document8 pagesChapter 4GolliwogsNo ratings yet
- Systems ClassDocument53 pagesSystems ClassBhetariya PareshNo ratings yet
- Description of Systems: M. J. Roberts All Rights Reserved. Edited by Dr. Robert AklDocument43 pagesDescription of Systems: M. J. Roberts All Rights Reserved. Edited by Dr. Robert AklFaraz HumayunNo ratings yet
- Chapter 4 Signal and SystemDocument23 pagesChapter 4 Signal and Systems221151543No ratings yet
- 3a SystemsDocument22 pages3a Systems215391No ratings yet
- L3 LTI SystemsDocument28 pagesL3 LTI SystemsAnshuman PandeyNo ratings yet
- CS Lecture 3Document25 pagesCS Lecture 3sadaf asmaNo ratings yet
- Control - Linear System Theory1Document178 pagesControl - Linear System Theory1Amruth ThelkarNo ratings yet
- Chapter6 - 4 Nov 2022Document22 pagesChapter6 - 4 Nov 2022ARIFF SHAH BIN ZAINOL ARIFFIN STUDENTNo ratings yet
- Lect2 SignalProcessingDocument30 pagesLect2 SignalProcessingEng:Mostafa Morsy MohamedNo ratings yet
- EEE221 Lec2 PDFDocument62 pagesEEE221 Lec2 PDFMd. Nazmul Huda 1610805643No ratings yet
- Chapter 3 Controllability ObservabilityDocument32 pagesChapter 3 Controllability ObservabilityKawther BenNo ratings yet
- Process ConvolutionDocument72 pagesProcess ConvolutionayadmanNo ratings yet
- MIT2Document12 pagesMIT2g9ynd4gpw8No ratings yet
- Systems and Transfer FunctionDocument48 pagesSystems and Transfer FunctionhgfhgfhfNo ratings yet
- Handout 4Document20 pagesHandout 4hamza shahbazNo ratings yet
- System Modeling in The Time Domain: 2.1: What Is A Model? Why Do We Need One?Document25 pagesSystem Modeling in The Time Domain: 2.1: What Is A Model? Why Do We Need One?Justin BautistaNo ratings yet
- Continuous-Time Systems: Dept. of Electrical and Computer Engineering The University of Texas at AustinDocument24 pagesContinuous-Time Systems: Dept. of Electrical and Computer Engineering The University of Texas at AustinIr Wn IkaarinaNo ratings yet
- Chap 3 MatDocument108 pagesChap 3 MatGooftilaaAniJiraachuunkooYesusiinNo ratings yet
- Signals and Systems Unit 2: Mit-WpuDocument31 pagesSignals and Systems Unit 2: Mit-WpuZaheen KhanNo ratings yet
- ESE242 Chapter 2Document12 pagesESE242 Chapter 2olivefieraNo ratings yet
- Linear System Theory and Design: Taesam KangDocument42 pagesLinear System Theory and Design: Taesam KangFiriceNguyenNo ratings yet
- System PrototypesDocument29 pagesSystem PrototypesYgor AguiarNo ratings yet
- Quizconvolution PDFDocument1 pageQuizconvolution PDFGeorge KaragiannidisNo ratings yet
- LECTURE 4 Sytetms ClassificationDocument42 pagesLECTURE 4 Sytetms ClassificationEzzadin AbdowahabNo ratings yet
- 8-Test Input Signal Transient and Steady-State Response of 1st Abd 2nd Order SystemsDocument32 pages8-Test Input Signal Transient and Steady-State Response of 1st Abd 2nd Order SystemsAzhar AliNo ratings yet
- Lecture 1Document47 pagesLecture 1oswardNo ratings yet
- Chapter 3 SlidesDocument69 pagesChapter 3 SlidesMelfini TambaNo ratings yet
- Signal and System Lecture 2Document21 pagesSignal and System Lecture 2ali_rehman87100% (1)
- Linear Mid1Document55 pagesLinear Mid1丁飞豪No ratings yet
- Chapter 4 CT - LTI Systems + Convolution IntegralDocument20 pagesChapter 4 CT - LTI Systems + Convolution Integral蓝蓝のDoraemonNo ratings yet
- Lecture03 (Math Rep1)Document73 pagesLecture03 (Math Rep1)kajela25No ratings yet
- Oscillation For A Second-Order Neutral Differential Equation With ImpulsesDocument24 pagesOscillation For A Second-Order Neutral Differential Equation With Impulsesmanoel cristiano marreiro sampaioNo ratings yet
- Introduction To Signals & Variables Lecture-3Document14 pagesIntroduction To Signals & Variables Lecture-3seltyNo ratings yet
- Nemecka3 TDS 01Document3 pagesNemecka3 TDS 01Karel NěmecNo ratings yet
- S&S - Week 7Document20 pagesS&S - Week 7machasong98No ratings yet
- LTI SystemsDocument14 pagesLTI SystemsSultana AyeshaNo ratings yet
- Properties of Linear, Time-Invariant (LTI) Systems: EGR 320: Signals & Systems Lecture 6: Feb. 7, 2011Document8 pagesProperties of Linear, Time-Invariant (LTI) Systems: EGR 320: Signals & Systems Lecture 6: Feb. 7, 2011MYNAMENo ratings yet
- Chapter 2 SystemDocument8 pagesChapter 2 Systemعظات روحيةNo ratings yet
- ELEC301 - Fall 2019 Homework 2Document3 pagesELEC301 - Fall 2019 Homework 2Rıdvan BalamurNo ratings yet
- Module-3 System Classification and Analysis Objective: To Understand The Concept of Systems, Classification, Signal Transmission ThroughDocument27 pagesModule-3 System Classification and Analysis Objective: To Understand The Concept of Systems, Classification, Signal Transmission ThroughMehul MayankNo ratings yet
- Automatic Control ExercisesDocument183 pagesAutomatic Control ExercisesFrancesco Vasturzo100% (1)
- Vibration AnalysisDocument18 pagesVibration AnalysisSangolla NarahariNo ratings yet
- CH 2 System and PropertiesDocument99 pagesCH 2 System and PropertiesPUSPA JOSHINo ratings yet
- Systems: Mathematical Model of A Physical ProcessDocument15 pagesSystems: Mathematical Model of A Physical ProcesszawirNo ratings yet
- EE2023 Signals & Systems Notes 2Document11 pagesEE2023 Signals & Systems Notes 2FarwaNo ratings yet
- Global Dynamics of A Predator-Prey System With Holling Type II Functional ResponseDocument12 pagesGlobal Dynamics of A Predator-Prey System With Holling Type II Functional ResponseReyna Mae MarangaNo ratings yet
- Signals & SystemsDocument55 pagesSignals & SystemsWaqas Akram GondalNo ratings yet
- Quiz On Continuous-Time ConvolutionDocument1 pageQuiz On Continuous-Time Convolutionalcabos12No ratings yet
- Control Theory, Tsrt09, TSRT06 Exercises & Solutions: 23 Mars 2021Document184 pagesControl Theory, Tsrt09, TSRT06 Exercises & Solutions: 23 Mars 2021Adel AdenaneNo ratings yet
- Chapter 6Document17 pagesChapter 6GolliwogsNo ratings yet
- Exercises For Signals and Systems (Part Four)Document3 pagesExercises For Signals and Systems (Part Four)Vincent YuchiNo ratings yet
- EECS3451 Chapter2Document24 pagesEECS3451 Chapter2nickbekiaris05No ratings yet
- Assignment 1Document4 pagesAssignment 1Ashish KushwahaNo ratings yet
- Controllability ObservDocument31 pagesControllability Observanuj kumarNo ratings yet
- KOM 3781 Discrete-Time Control Systems: Veysel GaziDocument38 pagesKOM 3781 Discrete-Time Control Systems: Veysel GaziFatih CanbolatNo ratings yet
- Stability Analysis of Periodically Switched Linear Systems Using Floquet TheoryDocument11 pagesStability Analysis of Periodically Switched Linear Systems Using Floquet TheoryTukesh SoniNo ratings yet
- Analog and Digital Control 1: Based On Lecture Notes by Jesper Sandberg ThomsenDocument43 pagesAnalog and Digital Control 1: Based On Lecture Notes by Jesper Sandberg ThomsenasdfgNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- RAK 860-930MHz 5.8dbi Fiberglass Antenna SpecificationDocument8 pagesRAK 860-930MHz 5.8dbi Fiberglass Antenna SpecificationSimbisaiNo ratings yet
- lm567c 4Document27 pageslm567c 4Adin BagindutNo ratings yet
- AD594 Thermocople AmplifierDocument8 pagesAD594 Thermocople Amplifierbakghaz_28121167No ratings yet
- Analog ModuleDocument13 pagesAnalog ModuleNgọc Đặng VănNo ratings yet
- MK4009GALTechnicalNotes RevADocument4 pagesMK4009GALTechnicalNotes RevAАлександр КарповNo ratings yet
- Types of Armature WindingDocument2 pagesTypes of Armature WindingCastello Akar100% (1)
- "FINE" FS-8000 Weighing IndicatorDocument4 pages"FINE" FS-8000 Weighing IndicatorjoviNo ratings yet
- Cerber61 LedDocument40 pagesCerber61 Ledred_zone0032639No ratings yet
- Practical Task 1 - Understand PC Components and PartsDocument2 pagesPractical Task 1 - Understand PC Components and PartsKhairul Afiq AbdullahNo ratings yet
- Skymasts Tetra Antenna Product Catalogue 2013Document57 pagesSkymasts Tetra Antenna Product Catalogue 2013Fabio CostaNo ratings yet
- EC8711 EMBEDDED LABORATORY Lab ManualDocument126 pagesEC8711 EMBEDDED LABORATORY Lab Manualbalabasker83% (6)
- Cell Coverage Buyers GuideDocument23 pagesCell Coverage Buyers Guidemonel_24671No ratings yet
- A Single Pass Assembler For IBM PCDocument18 pagesA Single Pass Assembler For IBM PCmb_4u67% (3)
- Gen Protection 077625-B41-SR-4122-0001-A4105-002 - 3-CDocument14 pagesGen Protection 077625-B41-SR-4122-0001-A4105-002 - 3-CRabindra SutradharNo ratings yet
- Diffpairs Cadence App Note 165Document19 pagesDiffpairs Cadence App Note 165Mallappa PatilNo ratings yet
- Niño John Jayme - CIRCUITS EXERCISE 03Document2 pagesNiño John Jayme - CIRCUITS EXERCISE 03Niño John JaymeNo ratings yet
- Installation Spa-600 PDFDocument2 pagesInstallation Spa-600 PDFHelio SilvaNo ratings yet
- 02.TAC03001-HO02-I1.6-7302 7330 ISAM Product Overview Intro HW CE PDFDocument24 pages02.TAC03001-HO02-I1.6-7302 7330 ISAM Product Overview Intro HW CE PDFSameh Eddine HachaichiNo ratings yet
- APC200 20controllerDocument5 pagesAPC200 20controllerHolly DrinovzNo ratings yet
- Agilent GSMDocument74 pagesAgilent GSMShashank PrajapatiNo ratings yet
- Tercel Isopulse HWDocument2 pagesTercel Isopulse HWNgoc Tuy Nguyen0% (1)
- SGI Prism DatasheetDocument2 pagesSGI Prism Datasheetmkatl976No ratings yet
- Literature Review On Mobile Phone DetectorDocument4 pagesLiterature Review On Mobile Phone Detectorzyfepyfej0p2100% (1)
- Kertas Penerangan 3Document23 pagesKertas Penerangan 3Amin IqmalNo ratings yet
- CPF Maintenance ManualDocument269 pagesCPF Maintenance ManualmarquezgaunaNo ratings yet
- How To Build A Touch OnDocument5 pagesHow To Build A Touch OnSolomon JanssenNo ratings yet
- DEBUGDocument11 pagesDEBUGria ramadhiyaniNo ratings yet
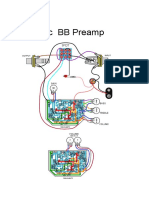
- Xotic BB Preamp: Input OutputDocument1 pageXotic BB Preamp: Input Outputjesus fuentesNo ratings yet
- Cobra Uniden Antenna Amplifiers Microphones CB Uniden Antenna Amplifiers MicrophonesDocument32 pagesCobra Uniden Antenna Amplifiers Microphones CB Uniden Antenna Amplifiers Microphonespetr lowNo ratings yet

























































































Download as ppt, pdf, or txt
You might also like
- Kathrein Antenna Dual BandDocument4 pagesKathrein Antenna Dual BandAmine AchrafNo ratings yet
- Chapter 4Document8 pagesChapter 4GolliwogsNo ratings yet
- Systems ClassDocument53 pagesSystems ClassBhetariya PareshNo ratings yet
- Description of Systems: M. J. Roberts All Rights Reserved. Edited by Dr. Robert AklDocument43 pagesDescription of Systems: M. J. Roberts All Rights Reserved. Edited by Dr. Robert AklFaraz HumayunNo ratings yet
- Chapter 4 Signal and SystemDocument23 pagesChapter 4 Signal and Systems221151543No ratings yet
- 3a SystemsDocument22 pages3a Systems215391No ratings yet
- L3 LTI SystemsDocument28 pagesL3 LTI SystemsAnshuman PandeyNo ratings yet
- CS Lecture 3Document25 pagesCS Lecture 3sadaf asmaNo ratings yet
- Control - Linear System Theory1Document178 pagesControl - Linear System Theory1Amruth ThelkarNo ratings yet
- Chapter6 - 4 Nov 2022Document22 pagesChapter6 - 4 Nov 2022ARIFF SHAH BIN ZAINOL ARIFFIN STUDENTNo ratings yet
- Lect2 SignalProcessingDocument30 pagesLect2 SignalProcessingEng:Mostafa Morsy MohamedNo ratings yet
- EEE221 Lec2 PDFDocument62 pagesEEE221 Lec2 PDFMd. Nazmul Huda 1610805643No ratings yet
- Chapter 3 Controllability ObservabilityDocument32 pagesChapter 3 Controllability ObservabilityKawther BenNo ratings yet
- Process ConvolutionDocument72 pagesProcess ConvolutionayadmanNo ratings yet
- MIT2Document12 pagesMIT2g9ynd4gpw8No ratings yet
- Systems and Transfer FunctionDocument48 pagesSystems and Transfer FunctionhgfhgfhfNo ratings yet
- Handout 4Document20 pagesHandout 4hamza shahbazNo ratings yet
- System Modeling in The Time Domain: 2.1: What Is A Model? Why Do We Need One?Document25 pagesSystem Modeling in The Time Domain: 2.1: What Is A Model? Why Do We Need One?Justin BautistaNo ratings yet
- Continuous-Time Systems: Dept. of Electrical and Computer Engineering The University of Texas at AustinDocument24 pagesContinuous-Time Systems: Dept. of Electrical and Computer Engineering The University of Texas at AustinIr Wn IkaarinaNo ratings yet
- Chap 3 MatDocument108 pagesChap 3 MatGooftilaaAniJiraachuunkooYesusiinNo ratings yet
- Signals and Systems Unit 2: Mit-WpuDocument31 pagesSignals and Systems Unit 2: Mit-WpuZaheen KhanNo ratings yet
- ESE242 Chapter 2Document12 pagesESE242 Chapter 2olivefieraNo ratings yet
- Linear System Theory and Design: Taesam KangDocument42 pagesLinear System Theory and Design: Taesam KangFiriceNguyenNo ratings yet
- System PrototypesDocument29 pagesSystem PrototypesYgor AguiarNo ratings yet
- Quizconvolution PDFDocument1 pageQuizconvolution PDFGeorge KaragiannidisNo ratings yet
- LECTURE 4 Sytetms ClassificationDocument42 pagesLECTURE 4 Sytetms ClassificationEzzadin AbdowahabNo ratings yet
- 8-Test Input Signal Transient and Steady-State Response of 1st Abd 2nd Order SystemsDocument32 pages8-Test Input Signal Transient and Steady-State Response of 1st Abd 2nd Order SystemsAzhar AliNo ratings yet
- Lecture 1Document47 pagesLecture 1oswardNo ratings yet
- Chapter 3 SlidesDocument69 pagesChapter 3 SlidesMelfini TambaNo ratings yet
- Signal and System Lecture 2Document21 pagesSignal and System Lecture 2ali_rehman87100% (1)
- Linear Mid1Document55 pagesLinear Mid1丁飞豪No ratings yet
- Chapter 4 CT - LTI Systems + Convolution IntegralDocument20 pagesChapter 4 CT - LTI Systems + Convolution Integral蓝蓝のDoraemonNo ratings yet
- Lecture03 (Math Rep1)Document73 pagesLecture03 (Math Rep1)kajela25No ratings yet
- Oscillation For A Second-Order Neutral Differential Equation With ImpulsesDocument24 pagesOscillation For A Second-Order Neutral Differential Equation With Impulsesmanoel cristiano marreiro sampaioNo ratings yet
- Introduction To Signals & Variables Lecture-3Document14 pagesIntroduction To Signals & Variables Lecture-3seltyNo ratings yet
- Nemecka3 TDS 01Document3 pagesNemecka3 TDS 01Karel NěmecNo ratings yet
- S&S - Week 7Document20 pagesS&S - Week 7machasong98No ratings yet
- LTI SystemsDocument14 pagesLTI SystemsSultana AyeshaNo ratings yet
- Properties of Linear, Time-Invariant (LTI) Systems: EGR 320: Signals & Systems Lecture 6: Feb. 7, 2011Document8 pagesProperties of Linear, Time-Invariant (LTI) Systems: EGR 320: Signals & Systems Lecture 6: Feb. 7, 2011MYNAMENo ratings yet
- Chapter 2 SystemDocument8 pagesChapter 2 Systemعظات روحيةNo ratings yet
- ELEC301 - Fall 2019 Homework 2Document3 pagesELEC301 - Fall 2019 Homework 2Rıdvan BalamurNo ratings yet
- Module-3 System Classification and Analysis Objective: To Understand The Concept of Systems, Classification, Signal Transmission ThroughDocument27 pagesModule-3 System Classification and Analysis Objective: To Understand The Concept of Systems, Classification, Signal Transmission ThroughMehul MayankNo ratings yet
- Automatic Control ExercisesDocument183 pagesAutomatic Control ExercisesFrancesco Vasturzo100% (1)
- Vibration AnalysisDocument18 pagesVibration AnalysisSangolla NarahariNo ratings yet
- CH 2 System and PropertiesDocument99 pagesCH 2 System and PropertiesPUSPA JOSHINo ratings yet
- Systems: Mathematical Model of A Physical ProcessDocument15 pagesSystems: Mathematical Model of A Physical ProcesszawirNo ratings yet
- EE2023 Signals & Systems Notes 2Document11 pagesEE2023 Signals & Systems Notes 2FarwaNo ratings yet
- Global Dynamics of A Predator-Prey System With Holling Type II Functional ResponseDocument12 pagesGlobal Dynamics of A Predator-Prey System With Holling Type II Functional ResponseReyna Mae MarangaNo ratings yet
- Signals & SystemsDocument55 pagesSignals & SystemsWaqas Akram GondalNo ratings yet
- Quiz On Continuous-Time ConvolutionDocument1 pageQuiz On Continuous-Time Convolutionalcabos12No ratings yet
- Control Theory, Tsrt09, TSRT06 Exercises & Solutions: 23 Mars 2021Document184 pagesControl Theory, Tsrt09, TSRT06 Exercises & Solutions: 23 Mars 2021Adel AdenaneNo ratings yet
- Chapter 6Document17 pagesChapter 6GolliwogsNo ratings yet
- Exercises For Signals and Systems (Part Four)Document3 pagesExercises For Signals and Systems (Part Four)Vincent YuchiNo ratings yet
- EECS3451 Chapter2Document24 pagesEECS3451 Chapter2nickbekiaris05No ratings yet
- Assignment 1Document4 pagesAssignment 1Ashish KushwahaNo ratings yet
- Controllability ObservDocument31 pagesControllability Observanuj kumarNo ratings yet
- KOM 3781 Discrete-Time Control Systems: Veysel GaziDocument38 pagesKOM 3781 Discrete-Time Control Systems: Veysel GaziFatih CanbolatNo ratings yet
- Stability Analysis of Periodically Switched Linear Systems Using Floquet TheoryDocument11 pagesStability Analysis of Periodically Switched Linear Systems Using Floquet TheoryTukesh SoniNo ratings yet
- Analog and Digital Control 1: Based On Lecture Notes by Jesper Sandberg ThomsenDocument43 pagesAnalog and Digital Control 1: Based On Lecture Notes by Jesper Sandberg ThomsenasdfgNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- RAK 860-930MHz 5.8dbi Fiberglass Antenna SpecificationDocument8 pagesRAK 860-930MHz 5.8dbi Fiberglass Antenna SpecificationSimbisaiNo ratings yet
- lm567c 4Document27 pageslm567c 4Adin BagindutNo ratings yet
- AD594 Thermocople AmplifierDocument8 pagesAD594 Thermocople Amplifierbakghaz_28121167No ratings yet
- Analog ModuleDocument13 pagesAnalog ModuleNgọc Đặng VănNo ratings yet
- MK4009GALTechnicalNotes RevADocument4 pagesMK4009GALTechnicalNotes RevAАлександр КарповNo ratings yet
- Types of Armature WindingDocument2 pagesTypes of Armature WindingCastello Akar100% (1)
- "FINE" FS-8000 Weighing IndicatorDocument4 pages"FINE" FS-8000 Weighing IndicatorjoviNo ratings yet
- Cerber61 LedDocument40 pagesCerber61 Ledred_zone0032639No ratings yet
- Practical Task 1 - Understand PC Components and PartsDocument2 pagesPractical Task 1 - Understand PC Components and PartsKhairul Afiq AbdullahNo ratings yet
- Skymasts Tetra Antenna Product Catalogue 2013Document57 pagesSkymasts Tetra Antenna Product Catalogue 2013Fabio CostaNo ratings yet
- EC8711 EMBEDDED LABORATORY Lab ManualDocument126 pagesEC8711 EMBEDDED LABORATORY Lab Manualbalabasker83% (6)
- Cell Coverage Buyers GuideDocument23 pagesCell Coverage Buyers Guidemonel_24671No ratings yet
- A Single Pass Assembler For IBM PCDocument18 pagesA Single Pass Assembler For IBM PCmb_4u67% (3)
- Gen Protection 077625-B41-SR-4122-0001-A4105-002 - 3-CDocument14 pagesGen Protection 077625-B41-SR-4122-0001-A4105-002 - 3-CRabindra SutradharNo ratings yet
- Diffpairs Cadence App Note 165Document19 pagesDiffpairs Cadence App Note 165Mallappa PatilNo ratings yet
- Niño John Jayme - CIRCUITS EXERCISE 03Document2 pagesNiño John Jayme - CIRCUITS EXERCISE 03Niño John JaymeNo ratings yet
- Installation Spa-600 PDFDocument2 pagesInstallation Spa-600 PDFHelio SilvaNo ratings yet
- 02.TAC03001-HO02-I1.6-7302 7330 ISAM Product Overview Intro HW CE PDFDocument24 pages02.TAC03001-HO02-I1.6-7302 7330 ISAM Product Overview Intro HW CE PDFSameh Eddine HachaichiNo ratings yet
- APC200 20controllerDocument5 pagesAPC200 20controllerHolly DrinovzNo ratings yet
- Agilent GSMDocument74 pagesAgilent GSMShashank PrajapatiNo ratings yet
- Tercel Isopulse HWDocument2 pagesTercel Isopulse HWNgoc Tuy Nguyen0% (1)
- SGI Prism DatasheetDocument2 pagesSGI Prism Datasheetmkatl976No ratings yet
- Literature Review On Mobile Phone DetectorDocument4 pagesLiterature Review On Mobile Phone Detectorzyfepyfej0p2100% (1)
- Kertas Penerangan 3Document23 pagesKertas Penerangan 3Amin IqmalNo ratings yet
- CPF Maintenance ManualDocument269 pagesCPF Maintenance ManualmarquezgaunaNo ratings yet
- How To Build A Touch OnDocument5 pagesHow To Build A Touch OnSolomon JanssenNo ratings yet
- DEBUGDocument11 pagesDEBUGria ramadhiyaniNo ratings yet
- Xotic BB Preamp: Input OutputDocument1 pageXotic BB Preamp: Input Outputjesus fuentesNo ratings yet
- Cobra Uniden Antenna Amplifiers Microphones CB Uniden Antenna Amplifiers MicrophonesDocument32 pagesCobra Uniden Antenna Amplifiers Microphones CB Uniden Antenna Amplifiers Microphonespetr lowNo ratings yet