Download as pptx, pdf, or txt
You might also like
- Design of A Modified Hand Operated Maize ShellerDocument18 pagesDesign of A Modified Hand Operated Maize ShellergemeeNo ratings yet
- Communications 2: Modulation and Coding TechniquesDocument9 pagesCommunications 2: Modulation and Coding Techniquesbecy welba100% (1)
- Television Audience Measurement: - A GuideDocument12 pagesTelevision Audience Measurement: - A GuideLuka LukaNo ratings yet
- Television: How Is The TV Industry MeasuredDocument19 pagesTelevision: How Is The TV Industry MeasuredTrinita IreneNo ratings yet
- Chapter 4 Digital Modulation - Part 1Document47 pagesChapter 4 Digital Modulation - Part 1Jazmi MukhtarNo ratings yet
- 1-Introduction To AnalogDocument7 pages1-Introduction To Analogshaky1623No ratings yet
- GH Cargo SpecDocument6 pagesGH Cargo SpecAriePrasetyoNo ratings yet
- Basic Factors of Television Transmission & ReceptionDocument33 pagesBasic Factors of Television Transmission & Receptionkumar100% (2)
- Basic Factors Affecting Television Transmission & ReceptionDocument28 pagesBasic Factors Affecting Television Transmission & ReceptionAshkarali KottakkalNo ratings yet
- TVDocument117 pagesTVTnek OrarrefNo ratings yet
- BROADCAST-ENGINEERING-LECTURE (1) (Recovered)Document166 pagesBROADCAST-ENGINEERING-LECTURE (1) (Recovered)Man Man100% (2)
- 2 - 5G TechnologyDocument25 pages2 - 5G TechnologyMushtaque Ahmad100% (1)
- Review in Broadcast Engineering and AcousticsDocument10 pagesReview in Broadcast Engineering and AcousticsMadel Roque100% (1)
- DTH (Direct To Home Television)Document13 pagesDTH (Direct To Home Television)Shanthi SanthanakrishnanNo ratings yet
- Radio Broadcast Engineering in The PhilippinesDocument45 pagesRadio Broadcast Engineering in The PhilippinesFerrolinoLouieNo ratings yet
- 1 Introduction AI SumanD PresentationDocument78 pages1 Introduction AI SumanD PresentationAnkit Wanjari100% (1)
- Video: Csc253 Interactive Multimedia - Chapter 6Document55 pagesVideo: Csc253 Interactive Multimedia - Chapter 6afiq8686No ratings yet
- 5g TechnologyDocument20 pages5g TechnologyChristin Ps100% (1)
- Broadcast Engineerin G: Engr. Leonardo A. Samaniego JRDocument72 pagesBroadcast Engineerin G: Engr. Leonardo A. Samaniego JRFerrolinoLouieNo ratings yet
- Ec1011 Television Video EngineeringDocument21 pagesEc1011 Television Video Engineeringyesyouareesh100% (3)
- DAB SystemDocument44 pagesDAB SystemRio WicaksonoNo ratings yet
- Intro To Viscom - IIDocument15 pagesIntro To Viscom - IIRajmohan100% (1)
- Common Mistakes in Broadcasting Manual - Final - UMDF - EED-1Document48 pagesCommon Mistakes in Broadcasting Manual - Final - UMDF - EED-1CHIMSI MULTIMEDIA100% (1)
- Television System DesignDocument19 pagesTelevision System DesignKim DumayanNo ratings yet
- CN 001 TSDocument32 pagesCN 001 TSoselopzaNo ratings yet
- Amplitude ModulationDocument31 pagesAmplitude ModulationShubham Kadam100% (1)
- Digital Television Terrestrial Multimedia Broadcasting (DTMB) - A New Itu-R DTV Terrestrial Broadcasting Standard For China and Other MarketsDocument37 pagesDigital Television Terrestrial Multimedia Broadcasting (DTMB) - A New Itu-R DTV Terrestrial Broadcasting Standard For China and Other MarketsKashif Aziz AwanNo ratings yet
- Chapter 8 - Advertising Media SelectionDocument34 pagesChapter 8 - Advertising Media Selectionmziabd100% (2)
- Jntuworld: T T V V T T V VDocument8 pagesJntuworld: T T V V T T V VPradeepCoolNo ratings yet
- Introduction To Wireless Communication - Radio CommunicationDocument21 pagesIntroduction To Wireless Communication - Radio Communicationashokyadav7390% (2)
- Angle Modulation: Angle Modulation Is Defined As A Process in Which The AngleDocument10 pagesAngle Modulation: Angle Modulation Is Defined As A Process in Which The AngleahasanNo ratings yet
- Narrow-Band FM and Wide-Band FM: Presented by N.A.Pappathi Ap / Ece, NprcetDocument32 pagesNarrow-Band FM and Wide-Band FM: Presented by N.A.Pappathi Ap / Ece, NprcetShayaan PappathiNo ratings yet
- EC2034Document1 pageEC2034Sumathy SubramanianNo ratings yet
- ECE 7 Introduction To FM Broadcasting Systems and StandardsDocument46 pagesECE 7 Introduction To FM Broadcasting Systems and StandardsChris Anthony CañalNo ratings yet
- OC QPDocument4 pagesOC QPrubanraj r (RA1811201010009)No ratings yet
- Circuit Theory 1 MidtermDocument101 pagesCircuit Theory 1 MidtermEL DamascoNo ratings yet
- Week 8 Assignment Solution PDFDocument4 pagesWeek 8 Assignment Solution PDFsantosh KumarNo ratings yet
- Television Engineering PDFDocument88 pagesTelevision Engineering PDFkrishkarnNo ratings yet
- Laser MetrologyDocument41 pagesLaser MetrologyjennybunnyomgNo ratings yet
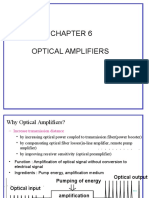
- Chapter 6 Optical AmplifiersDocument40 pagesChapter 6 Optical AmplifiersThasnimFathimaNo ratings yet
- Architecture CellularDocument30 pagesArchitecture CellularThiaguNo ratings yet
- Pulse ModulationDocument55 pagesPulse ModulationMuhammad Aiman AmranNo ratings yet
- DSP Final Exam Answers - 2017Document9 pagesDSP Final Exam Answers - 2017AbadiNo ratings yet
- ITC-77IP Broadcast SystemDocument35 pagesITC-77IP Broadcast Systemjudy kimNo ratings yet
- Audio-Video Systems RevisedDocument3 pagesAudio-Video Systems RevisedEr Ronak Patel100% (1)
- Noise in ModulationDocument64 pagesNoise in ModulationDebojyoti KarmakarNo ratings yet
- Digital Radio Mondiale (DRM) - JanDocument33 pagesDigital Radio Mondiale (DRM) - JanShishir GuptaNo ratings yet
- Edited 2 MarksDocument24 pagesEdited 2 MarksMohamed RiasNo ratings yet
- Basic Radio HandlingDocument26 pagesBasic Radio HandlingVlademir Geb Dubouzet100% (1)
- Unit 2 Engineering-EthicsDocument42 pagesUnit 2 Engineering-Ethicsyuvaraj sNo ratings yet
- Series Elastic ActuatorDocument5 pagesSeries Elastic Actuatoraliza younisNo ratings yet
- Modeling of Rotational Mechanical SystemsDocument32 pagesModeling of Rotational Mechanical SystemsSandeepgandotra2No ratings yet
- EE207 Problem Set 1 IIT ROPARDocument7 pagesEE207 Problem Set 1 IIT ROPARsumithasreekumar5No ratings yet
- 2 GearsDocument3 pages2 GearsDONE AND DUSTEDNo ratings yet
- EE207 Problem Set 1Document2 pagesEE207 Problem Set 1Rishabh AgarwalNo ratings yet
- On Phase MarginDocument16 pagesOn Phase Marginchiyu10No ratings yet
- Chapter 2 - v1sDocument97 pagesChapter 2 - v1sKiet Kuat KongNo ratings yet
- L L T J T B T K T FXTXT: F 2007 P E I - P (Open-Book, Open-Notes) Page 1/4Document4 pagesL L T J T B T K T FXTXT: F 2007 P E I - P (Open-Book, Open-Notes) Page 1/4JaneNo ratings yet
- 3.1 Time-Domain Analysis of Control Systems: Unit-IiiDocument23 pages3.1 Time-Domain Analysis of Control Systems: Unit-IiiRajasekhar AtlaNo ratings yet
- SYSTEM: Gear train with friction and inertia: J T,θ ,F TDocument2 pagesSYSTEM: Gear train with friction and inertia: J T,θ ,F TSaiNo ratings yet
- ME 475 Mechatronics: Semester: February 2015Document15 pagesME 475 Mechatronics: Semester: February 2015ফারহান আহমেদ আবীরNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Digital AM and FM BroadcastingDocument47 pagesDigital AM and FM BroadcastingHans Christian Macasa100% (1)
- AM and FM BroadcastingDocument32 pagesAM and FM BroadcastingHans Christian MacasaNo ratings yet
- Digital TelevisionDocument27 pagesDigital TelevisionHans Christian MacasaNo ratings yet
- Part 6a Recording Technology: IntroductionDocument76 pagesPart 6a Recording Technology: IntroductionHans Christian MacasaNo ratings yet
- Legal Framework: RA 9292 & PD 1096: Dr. Vicente Y. Buenconsejo, JR., PeceDocument50 pagesLegal Framework: RA 9292 & PD 1096: Dr. Vicente Y. Buenconsejo, JR., PeceHans Christian MacasaNo ratings yet
- Carbohydrates: Presented byDocument28 pagesCarbohydrates: Presented byHans Christian MacasaNo ratings yet
- Navigational Aids - SonarDocument34 pagesNavigational Aids - SonarHans Christian MacasaNo ratings yet
- Week 13 - Digital TVDocument28 pagesWeek 13 - Digital TVHans Christian MacasaNo ratings yet
- PhotoVoltaic CellsDocument31 pagesPhotoVoltaic CellsHans Christian MacasaNo ratings yet
- Greek Folk Dances: A Report by Harvey John PolidarioDocument9 pagesGreek Folk Dances: A Report by Harvey John PolidarioHans Christian MacasaNo ratings yet
- Discrete FunctionsDocument20 pagesDiscrete FunctionsHans Christian MacasaNo ratings yet
- Electrical Engineering PDFDocument8 pagesElectrical Engineering PDFHans Christian MacasaNo ratings yet
- Main Shaft AssemblyDocument14 pagesMain Shaft AssemblyFrancis MartinezNo ratings yet
- Nord Clincher CatalogDocument356 pagesNord Clincher CatalogPaulo HenriqueNo ratings yet
- Transfer CaseDocument41 pagesTransfer CaseLeonardo CruzNo ratings yet
- Radicon Product Brochure Metric EngDocument8 pagesRadicon Product Brochure Metric EngYOGESH GOPALNo ratings yet
- Design of Transmission Systems - Important QuestonsDocument5 pagesDesign of Transmission Systems - Important QuestonsPost BoxNo ratings yet
- Chapter 9 - Suggested ProblemsDocument10 pagesChapter 9 - Suggested Problemschanmyae toeyeeNo ratings yet
- Kinetic Sculpture For The Engineering BuildingDocument54 pagesKinetic Sculpture For The Engineering BuildingsekkarvelNo ratings yet
- Gear Geometry & Profile TheoryDocument24 pagesGear Geometry & Profile Theoryansh1983100% (2)
- Class 28 - Modeling of A Gear TrainDocument19 pagesClass 28 - Modeling of A Gear Trainapi-26676616100% (2)
- CLBT754Document2 pagesCLBT754Sumant100% (1)
- 205-03 Front Drive Axle and Differential - Diagnosis and TestingDocument6 pages205-03 Front Drive Axle and Differential - Diagnosis and TestingCARLOS LIMADANo ratings yet
- Gearboxes in AutomobilesDocument95 pagesGearboxes in AutomobilesAravind LakhanNo ratings yet
- DTE Unit 2 MCQs (Belt, Chain and Rope Drives)Document8 pagesDTE Unit 2 MCQs (Belt, Chain and Rope Drives)Mannam Sarath SarathNo ratings yet
- 02 Dividing HeadDocument22 pages02 Dividing HeadMohit KumarNo ratings yet
- Mod 6 Book 5 Springs Bearings Control Systems GearsDocument40 pagesMod 6 Book 5 Springs Bearings Control Systems Gearsranjit prasadNo ratings yet
- Alpina Catalogue 2005Document15 pagesAlpina Catalogue 2005jugoslav_sm100% (1)
- SIF1012 SD Wheel Loaders - 13 - Transmission Basic (SD310)Document42 pagesSIF1012 SD Wheel Loaders - 13 - Transmission Basic (SD310)AimHigh100% (1)
- OBJECT: To Study of A Lathe Gear Box. TheoryDocument5 pagesOBJECT: To Study of A Lathe Gear Box. TheoryThe AIRS CreationsNo ratings yet
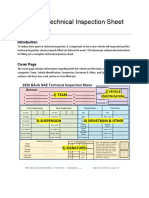
- Baja SAE Technical Inspection Sheet InstructionsDocument6 pagesBaja SAE Technical Inspection Sheet InstructionsaaaaNo ratings yet
- Engineering How Things Work How Manual Transmissions WorkDocument15 pagesEngineering How Things Work How Manual Transmissions WorkAkshay SinghNo ratings yet
- HC Thesis Jacob Cowdrey Analysis of Gear Tooth Profiles For Use in A Mechanical ClockDocument24 pagesHC Thesis Jacob Cowdrey Analysis of Gear Tooth Profiles For Use in A Mechanical ClockFernando BentancorNo ratings yet
- 6.3. Example of Transmission Ratio Assessment 6.3.1. Power-Split Hydro-Mechanical TransmissionDocument2 pages6.3. Example of Transmission Ratio Assessment 6.3.1. Power-Split Hydro-Mechanical TransmissionNita SebastianNo ratings yet
- 4at Auto Trans PDFDocument60 pages4at Auto Trans PDFЙордан ВасилевNo ratings yet
- 850TM 880TM 810TM: Marshall MultispreadDocument23 pages850TM 880TM 810TM: Marshall Multispreadal110No ratings yet
- Automobile Design (5051)Document4 pagesAutomobile Design (5051)Ziyad KprNo ratings yet
- Automotive Driveline Overview PDFDocument8 pagesAutomotive Driveline Overview PDFKarniNo ratings yet
- Analysis and Optimisation of All Terrain WheelchairDocument10 pagesAnalysis and Optimisation of All Terrain WheelchairAshish NandaNo ratings yet
- Manual Drive Train and AxlesDocument257 pagesManual Drive Train and AxlesVishwanath B Mangoji100% (2)