Download as ppt, pdf, or txt
You might also like
- Design and Implementation of Simple As Possible Computer (SAP-1)Document52 pagesDesign and Implementation of Simple As Possible Computer (SAP-1)Muhammad Anas 484-FET/BSEE/F18No ratings yet
- 1-Evolution of ComputersDocument51 pages1-Evolution of ComputersShiela Mae BautistaNo ratings yet
- 18Csc203J:Computer Organization and ArchitectureDocument56 pages18Csc203J:Computer Organization and ArchitectureSENTHIL RNo ratings yet
- ECE Department ECI Lab ManualDocument80 pagesECE Department ECI Lab ManualArputharaj JohnsonNo ratings yet
- 0008 - Fish Culture Automation With Auto Pumping, Temperature Control and Food FeedingDocument3 pages0008 - Fish Culture Automation With Auto Pumping, Temperature Control and Food FeedingPrasad RaoNo ratings yet
- Central Processing UnitDocument61 pagesCentral Processing UnitLasithaNo ratings yet
- Fetch Execute CycleDocument4 pagesFetch Execute Cycleلوبنا نسرينNo ratings yet
- Generalized Permutations and CombinationsDocument42 pagesGeneralized Permutations and CombinationsBasim AlthafNo ratings yet
- 04 - Fetch Decode Execute Cycle PDFDocument3 pages04 - Fetch Decode Execute Cycle PDFShaun HaxaelNo ratings yet
- Review Article Monitoring and Control Systems in Agriculture Using Intelligent Sensor Techniques: A Review of The Aeroponic SystemDocument19 pagesReview Article Monitoring and Control Systems in Agriculture Using Intelligent Sensor Techniques: A Review of The Aeroponic Systemjose100% (1)
- Electronic Devices Lab MANUALDocument24 pagesElectronic Devices Lab MANUALna_hariprsadNo ratings yet
- Circuits and Devices Lab Manual (II Sem BE-ECE, AU-CBE)Document105 pagesCircuits and Devices Lab Manual (II Sem BE-ECE, AU-CBE)Dr. N.Shanmugasundaram83% (6)
- Internet of Things Course SyllabusDocument3 pagesInternet of Things Course SyllabusTanimunNo ratings yet
- Lab Manual Electronic Devices and Circuits Practical 2Document10 pagesLab Manual Electronic Devices and Circuits Practical 2Engr Zaryab WarraichNo ratings yet
- Assignment 1-Intelligence SystemDocument13 pagesAssignment 1-Intelligence SystemmamtalalwaniNo ratings yet
- Embedded Systems IntroductionDocument44 pagesEmbedded Systems IntroductionGokulSubramanianNo ratings yet
- Instruction Set of 8085.PDF Imp1Document82 pagesInstruction Set of 8085.PDF Imp1KRISHNAVINOD100% (2)
- Instruction Set of 8086 Microprocessor by Er. Swapnil V. KawareDocument85 pagesInstruction Set of 8086 Microprocessor by Er. Swapnil V. KawareswapnilNo ratings yet
- Fcfs Scheduling Algorithm PDFDocument2 pagesFcfs Scheduling Algorithm PDFChristopherNo ratings yet
- EC2155 - Circuits & Devices Lab ManualDocument41 pagesEC2155 - Circuits & Devices Lab ManualRamkumar Sivakaminathan100% (1)
- DSP Ec1302 Parta & Part B Questions and Answers11Document33 pagesDSP Ec1302 Parta & Part B Questions and Answers11ohmshankar100% (2)
- Communication Hardware & Communication SoftwareDocument16 pagesCommunication Hardware & Communication SoftwareDigs ObrienNo ratings yet
- Advantages of Client Server ComputerDocument1 pageAdvantages of Client Server ComputerRavi GajenthranNo ratings yet
- ITT430 - Topic 1 - Introduction To Microcomputer (20202)Document2 pagesITT430 - Topic 1 - Introduction To Microcomputer (20202)miorsocceroosNo ratings yet
- Embedded Systems Lecture 5 Board Based Embedded SystemDocument79 pagesEmbedded Systems Lecture 5 Board Based Embedded SystemElihu GetachewNo ratings yet
- 1-IAS Architecture-12-12-2022Document34 pages1-IAS Architecture-12-12-2022Rohan Agrawal 961No ratings yet
- Chapter 1-Basics of MNGT ModifiedDocument39 pagesChapter 1-Basics of MNGT ModifiedBahredin AbdellaNo ratings yet
- Application and Layered ArchitectureDocument27 pagesApplication and Layered ArchitectureManish KumarNo ratings yet
- Computer Architecture PDFDocument18 pagesComputer Architecture PDFMuhammad Mehroz BadshahNo ratings yet
- 8 Bit Microprocessor: Mayank Bhatnagar Vaibhav Mahimkar Dominic AlphonseDocument25 pages8 Bit Microprocessor: Mayank Bhatnagar Vaibhav Mahimkar Dominic Alphonsekartish8999No ratings yet
- EcCST ManualDocument62 pagesEcCST Manualmatius.qNo ratings yet
- Linked List: Data Structure & AlgorithmsDocument42 pagesLinked List: Data Structure & Algorithmsapi-394738731No ratings yet
- Lesson 3: Hardware & SoftwareDocument42 pagesLesson 3: Hardware & SoftwareRosen LPNo ratings yet
- Memory BasicsDocument25 pagesMemory Basicsrajivsharma1610No ratings yet
- 5 SolDocument4 pages5 Solevilanubhav50% (2)
- UML Use Case Diagram Example For A Credit Cards Processing System (Credit Card Payment Gateway)Document2 pagesUML Use Case Diagram Example For A Credit Cards Processing System (Credit Card Payment Gateway)Tushar TariNo ratings yet
- Chapter 1 Introduction To Robotics PDFDocument10 pagesChapter 1 Introduction To Robotics PDFOmar AL JabaiNo ratings yet
- HCIDocument22 pagesHCIHimanshu ThakurNo ratings yet
- Mp3-8-Bit Microprocessor Architecture and OperationDocument17 pagesMp3-8-Bit Microprocessor Architecture and OperationserjaniNo ratings yet
- MPMC PDFDocument210 pagesMPMC PDFAnonymous TxxI4MTTNo ratings yet
- EC8551 CN SyllabusDocument2 pagesEC8551 CN SyllabusRagavanNo ratings yet
- E CommerceDocument16 pagesE CommerceGagandeep Sharma100% (2)
- Lesson 4 - Input and Output C++Document48 pagesLesson 4 - Input and Output C++lvincent7No ratings yet
- COMP 3511 - Operating SystemDocument38 pagesCOMP 3511 - Operating SystemLinh TaNo ratings yet
- CoaDocument11 pagesCoashubhampawar404043No ratings yet
- Multicore ProcessorDocument15 pagesMulticore ProcessorPhani Kumar100% (1)
- COMP 231 Microprocessor and Assembly LanguageDocument55 pagesCOMP 231 Microprocessor and Assembly LanguageAanchalAdhikariNo ratings yet
- Module3 ISADocument51 pagesModule3 ISAwatsontamilNo ratings yet
- Flynns TaxonomyDocument79 pagesFlynns TaxonomyKALAIVANI0% (1)
- Networking 1Document28 pagesNetworking 1rahul3071No ratings yet
- Computer Laboratory Manual (Ai) Version 1.3Document70 pagesComputer Laboratory Manual (Ai) Version 1.3hassan khanNo ratings yet
- PointersDocument30 pagesPointersPartha AichNo ratings yet
- Java Object Oriented ProgrammingDocument81 pagesJava Object Oriented ProgrammingsyafiqNo ratings yet
- ECE 027 - Module 1 - Introduction About Semiconductor DiodesDocument54 pagesECE 027 - Module 1 - Introduction About Semiconductor DiodesMiyuki NakiriNo ratings yet
- 8085 Microprocessor-BCA VIDocument113 pages8085 Microprocessor-BCA VIMarieFernandesNo ratings yet
- Computer Organization and ArchitectureDocument21 pagesComputer Organization and ArchitectureHebziba Jeba Rani S100% (1)
- Introduction To Information & Communication Technology (Ict)Document41 pagesIntroduction To Information & Communication Technology (Ict)Lucky LuckyNo ratings yet
- Intel Microprocessors Architecture ProgrDocument4 pagesIntel Microprocessors Architecture ProgrIan MainaNo ratings yet
- CS111-PART 3 - Computer Hardware UnitDocument39 pagesCS111-PART 3 - Computer Hardware UnitJian KusanagiNo ratings yet
- The Central Processing Unit:: What Goes On Inside The ComputerDocument60 pagesThe Central Processing Unit:: What Goes On Inside The Computermsk123123No ratings yet
- HM-R Series FSK Receiver Module: GeneralDocument4 pagesHM-R Series FSK Receiver Module: GeneralmecatronicanueveNo ratings yet
- FetronDocument40 pagesFetronJeremy Cutstone100% (2)
- A Study of Layout Strategies in RF CMOS DesignDocument6 pagesA Study of Layout Strategies in RF CMOS Designmdr911No ratings yet
- SummationDocument3 pagesSummationAnamika Rai AroraNo ratings yet
- UENR88640001 EVC600I Automatic Voltage Regulator (UENR8864-01)Document9 pagesUENR88640001 EVC600I Automatic Voltage Regulator (UENR8864-01)Carlos U. CallirgosNo ratings yet
- BEC303 Set1Document3 pagesBEC303 Set1vedd22eceNo ratings yet
- Maxnc Pinass TableDocument2 pagesMaxnc Pinass TableBreno LizardoNo ratings yet
- Differential RAID: Rethinking RAID For SSD ReliabilityDocument5 pagesDifferential RAID: Rethinking RAID For SSD ReliabilityRabiul SikderNo ratings yet
- 8 Bit Shift Register With Output Latches (3 State) : Order CodesDocument16 pages8 Bit Shift Register With Output Latches (3 State) : Order CodesQuyet Pham DangNo ratings yet
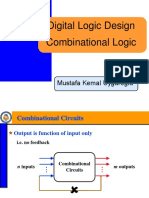
- Digital Logic Design Combinational Logic: Mustafa Kemal UyguroğluDocument27 pagesDigital Logic Design Combinational Logic: Mustafa Kemal UyguroğluSimon ElysiumNo ratings yet
- BCM57785Document678 pagesBCM57785Nick NottNo ratings yet
- IA240 Hardware Users Manual v8Document13 pagesIA240 Hardware Users Manual v8Ricky Andreas Kristianto SiringoringoNo ratings yet
- Battery CHECK-LISTDocument1 pageBattery CHECK-LISTnitin_awasthiNo ratings yet
- Puranmal Lahoti Government Polytechnic College, Latur: Micro-Project ProposalDocument11 pagesPuranmal Lahoti Government Polytechnic College, Latur: Micro-Project ProposalAadil • ShaikhNo ratings yet
- Aoc Lm929 LCD Monitor SMDocument56 pagesAoc Lm929 LCD Monitor SMnegrusrlNo ratings yet
- JY01 V3.5 2018-EnglishDocument12 pagesJY01 V3.5 2018-Englishveerakumars100% (1)
- Motherboard TerminologyDocument8 pagesMotherboard TerminologyshockkrewNo ratings yet
- Option GTM378 DS EngDocument2 pagesOption GTM378 DS Engwonderi9No ratings yet
- Arduino - LibrariesDocument8 pagesArduino - LibrariesAli MohamedNo ratings yet
- Unit-3 - Function Generator Using IC 8038Document10 pagesUnit-3 - Function Generator Using IC 8038yp2401553No ratings yet
- DLC MCQDocument61 pagesDLC MCQYuvaraj ShanNo ratings yet
- Datesheet For Diploma HSBTE Exam Jan 2024 - 22.12.23Document247 pagesDatesheet For Diploma HSBTE Exam Jan 2024 - 22.12.23kumarprince64344No ratings yet
- Three-Phase Full-Wave Rectifier With R & R-L LoadsDocument12 pagesThree-Phase Full-Wave Rectifier With R & R-L LoadsAmer Al-khorasaniNo ratings yet
- Deld Mcqs 1Document25 pagesDeld Mcqs 1hertzberg 1No ratings yet
- Computer FundamentalsDocument6 pagesComputer FundamentalsBhagat Singh RanaNo ratings yet
- Micro-Power Supply-Voltage Supervisors: General Description FeaturesDocument12 pagesMicro-Power Supply-Voltage Supervisors: General Description FeaturesShaswat DubeyNo ratings yet
- Ams Lec 02 Spice v01Document87 pagesAms Lec 02 Spice v01Ahmed AtefNo ratings yet
- CDX-S22 - S22S (v.1.0)Document50 pagesCDX-S22 - S22S (v.1.0)nospamzNo ratings yet
- Satellite Comm MCQ PDFDocument20 pagesSatellite Comm MCQ PDFdbircsNo ratings yet