Download as ppt, pdf, or txt
You might also like
- Airsystems PPT 5 Autopilot SystemDocument29 pagesAirsystems PPT 5 Autopilot SystemKellie NuludNo ratings yet
- CH 05 - Flight Controls PDFDocument12 pagesCH 05 - Flight Controls PDFFahmi PrayogiNo ratings yet
- Ata 27 FCS System OverviewDocument8 pagesAta 27 FCS System Overviewbnolasco0% (1)
- Sri Ramakrishna Institute of Technology, Coimbatore-10: Mechatronics QUIZ-2Document5 pagesSri Ramakrishna Institute of Technology, Coimbatore-10: Mechatronics QUIZ-2Veerakumar SNo ratings yet
- ASI Full NotesDocument171 pagesASI Full NotesmuthumariNo ratings yet
- Aircraft Hydraulic SystemsDocument23 pagesAircraft Hydraulic SystemsGopal Jetani0% (1)
- Aircraft Fuel SystemsDocument12 pagesAircraft Fuel SystemsEdwin ForgielNo ratings yet
- PneumaticDocument18 pagesPneumaticMansoor AliNo ratings yet
- Electronic Flight Instrument System (Efis) - SumDocument18 pagesElectronic Flight Instrument System (Efis) - SumDaniel MkandawireNo ratings yet
- Aemr-Unit 1-Piston EngineDocument85 pagesAemr-Unit 1-Piston Engineuthira100% (1)
- Aircraft Pneumatic SystemsDocument46 pagesAircraft Pneumatic SystemsSasiKumar100% (1)
- Wind Tunnel Technique Notes For Aeronautical Engineers TP 1Document2 pagesWind Tunnel Technique Notes For Aeronautical Engineers TP 1Adarsh KumarNo ratings yet
- Basic Aerodynamics Module 4Document86 pagesBasic Aerodynamics Module 4Gadadhar DeyNo ratings yet
- Fly by Wire and Fly by OpticsDocument7 pagesFly by Wire and Fly by OpticsvenkatsahulNo ratings yet
- Lecture Notes Aircraft Navigation (Lecture 1,2)Document9 pagesLecture Notes Aircraft Navigation (Lecture 1,2)VIRAJ HADKARNo ratings yet
- Ilities of AvionicsDocument9 pagesIlities of AvionicsHariNo ratings yet
- Srinivasan Engineering College, Perambalur Department of Aeronautical Engineering Ae 1014 Air Traffic Control and Aerodrome DesignDocument10 pagesSrinivasan Engineering College, Perambalur Department of Aeronautical Engineering Ae 1014 Air Traffic Control and Aerodrome Designmurjass85No ratings yet
- Unit - I Aircraft Control SystemsDocument73 pagesUnit - I Aircraft Control SystemsVishnu Kiran100% (1)
- Piston EngineDocument6 pagesPiston EngineanandNo ratings yet
- Esa 2 Mark Q & Answer PDFDocument11 pagesEsa 2 Mark Q & Answer PDFChadwickajiNo ratings yet
- Chapter 1 Pneumatic SystemDocument95 pagesChapter 1 Pneumatic SystemNazer Mangirapin BarisNo ratings yet
- Artificial Feel AircraftDocument8 pagesArtificial Feel Aircraftashnek100% (1)
- Aircraft Structures: Aircraft LoadsDocument27 pagesAircraft Structures: Aircraft LoadsniamNo ratings yet
- Pneumatic System: GP CPT Md. Abdus SalamDocument31 pagesPneumatic System: GP CPT Md. Abdus SalamMuhammedNayeemNo ratings yet
- Aircraft Systems - Lec 3Document36 pagesAircraft Systems - Lec 3aahsan345100% (1)
- Stablity, Control and LimitationsDocument359 pagesStablity, Control and LimitationsgadisaNo ratings yet
- Chapter 2 - Fuel Supply SystemDocument14 pagesChapter 2 - Fuel Supply SystemLalith Koushik GanganapalliNo ratings yet
- Pneumatic SystemsDocument8 pagesPneumatic SystemsRam KumarNo ratings yet
- 29 Hydraulic SystemDocument10 pages29 Hydraulic SystemAlejandro FernandezNo ratings yet
- Air Data SystemDocument15 pagesAir Data SystemChouaib Ben Boubaker100% (1)
- I C - Engines-NotesDocument15 pagesI C - Engines-Notessuhas_SCEMNo ratings yet
- CAMD ExamplesDocument30 pagesCAMD ExamplesSameerKulkarniNo ratings yet
- Inlets and NozzlesDocument63 pagesInlets and NozzlesMokshanandNo ratings yet
- Fly by WireDocument2 pagesFly by WireAmit VarmaNo ratings yet
- BSC Piston Engine NotesDocument8 pagesBSC Piston Engine NotessivasaikuamrreddyNo ratings yet
- 2 Mark Q& A, Univ Ques PDFDocument32 pages2 Mark Q& A, Univ Ques PDFRamNo ratings yet
- High Speed FlightDocument3 pagesHigh Speed Flightmamaadam02100% (1)
- P of F Notes For StudentsDocument3 pagesP of F Notes For StudentsAnushkaa Desai100% (1)
- Wind Tunnel InroductionDocument38 pagesWind Tunnel Inroductionmich48chinNo ratings yet
- Unit 1: Configuration Layout and LoftDocument45 pagesUnit 1: Configuration Layout and LoftDaxit LodaliyaNo ratings yet
- Aircraft Instrument SystemsDocument34 pagesAircraft Instrument SystemsArun Vinthan100% (2)
- AEMR-Unit - II & III, 2 Marks & 16 Marks Questions With Anwers-IV Yr AeroDocument39 pagesAEMR-Unit - II & III, 2 Marks & 16 Marks Questions With Anwers-IV Yr AeroRAJASUDHAKAR SNo ratings yet
- Principle of LVDT OperationDocument4 pagesPrinciple of LVDT OperationivanNo ratings yet
- Remote Indicating CompassDocument2 pagesRemote Indicating CompassSarabjit MaheyNo ratings yet
- Avionics Question Bank and NotesDocument13 pagesAvionics Question Bank and NotesFaisal Muhammed MavathuNo ratings yet
- Flight Control ActuationDocument8 pagesFlight Control ActuationhunganhngocNo ratings yet
- Landing Gear Slide Chapter 3Document35 pagesLanding Gear Slide Chapter 3mellon3duwen100% (1)
- Flight Dynamics - Stability (General)Document33 pagesFlight Dynamics - Stability (General)Rajesh Kancheti100% (3)
- Presentation of Auto PilotDocument43 pagesPresentation of Auto PilotVenkatakumar Chowdary KarlakuntaNo ratings yet
- AirfoilsDocument63 pagesAirfoilsFabian TorresNo ratings yet
- SR TechniquesDocument673 pagesSR TechniquesReBeL Tv LxNo ratings yet
- Flight Control SystemDocument15 pagesFlight Control SystemArcer 97100% (1)
- ASD362 2019 WTT3 Wind Tunnel Calibration PDFDocument24 pagesASD362 2019 WTT3 Wind Tunnel Calibration PDFSharvaniNo ratings yet
- Aircraft Brake SystemDocument11 pagesAircraft Brake SystemMuhammedNayeemNo ratings yet
- Aircraft Braking SystemsDocument14 pagesAircraft Braking SystemsLivil Lyle100% (1)
- 08rr410306 Jet Propulsion and Rocket EngineeringDocument6 pages08rr410306 Jet Propulsion and Rocket EngineeringsmijusNo ratings yet
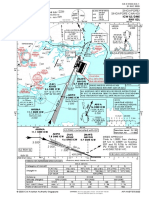
- Instrument Approach Chart - Icao: WSD34 500ft ALT GND Wsr6 200ft ALT GNDDocument1 pageInstrument Approach Chart - Icao: WSD34 500ft ALT GND Wsr6 200ft ALT GNDabang fayyadNo ratings yet
- Digital Flight Control SystemDocument2 pagesDigital Flight Control SystemKannappan CtNo ratings yet
- Theory AssignmentDocument3 pagesTheory AssignmentDan WkNo ratings yet
- Cat KittenDocument10 pagesCat KittenAnurag Rana100% (1)
- Parts: Heat Shield Aerobrake ParachuteDocument1 pageParts: Heat Shield Aerobrake ParachuteAnurag RanaNo ratings yet
- Confidential: Table/Graph Sheet Etc. Else Mention "NOT APPLICABLE"Document3 pagesConfidential: Table/Graph Sheet Etc. Else Mention "NOT APPLICABLE"Anurag RanaNo ratings yet
- Niraj Singh NegiDocument3 pagesNiraj Singh NegiAnurag RanaNo ratings yet
- Tetrahedron Graphite Bolts: UprightingDocument1 pageTetrahedron Graphite Bolts: UprightingAnurag RanaNo ratings yet
- Polyester Nylon Kevlar: Connected SystemsDocument2 pagesPolyester Nylon Kevlar: Connected SystemsAnurag RanaNo ratings yet
- Sun Sensor: CommunicationDocument1 pageSun Sensor: CommunicationAnurag RanaNo ratings yet
- Transmission Error in Wireless SystemDocument15 pagesTransmission Error in Wireless SystemAnurag RanaNo ratings yet
- Endeavour Crater Purgatory Dune Washington University in St. LouisDocument1 pageEndeavour Crater Purgatory Dune Washington University in St. LouisAnurag RanaNo ratings yet
- Mer-A Mer-B Boeing Delta II Cape Canaveral Space Launch Complex 17 Trans-Mars InjectionDocument3 pagesMer-A Mer-B Boeing Delta II Cape Canaveral Space Launch Complex 17 Trans-Mars InjectionAnurag RanaNo ratings yet
- Endurance Crater Victoria Crater Columbia HillsDocument1 pageEndurance Crater Victoria Crater Columbia HillsAnurag RanaNo ratings yet
- RobotDocument1 pageRobotAnurag RanaNo ratings yet
- MarsDocument1 pageMarsAnurag RanaNo ratings yet
- biology bacterium yeast animals atoms mycoplasmas μm: Cell, inDocument1 pagebiology bacterium yeast animals atoms mycoplasmas μm: Cell, inAnurag RanaNo ratings yet
- Spirit Opportunity: Nasa Robotic Space Mission Mars Rovers Mars Rovers Geology Martian Solar DaysDocument1 pageSpirit Opportunity: Nasa Robotic Space Mission Mars Rovers Mars Rovers Geology Martian Solar DaysAnurag RanaNo ratings yet
- Components of A CellDocument2 pagesComponents of A CellAnurag RanaNo ratings yet
- Rana Anurag Aeromodelling Lab Final Report 08Document18 pagesRana Anurag Aeromodelling Lab Final Report 08Anurag RanaNo ratings yet
- Every 26 Months Minimizes Travel Times and ExpenseDocument1 pageEvery 26 Months Minimizes Travel Times and ExpenseAnurag RanaNo ratings yet
- Computing With Dendrites: New Roles For Old Structures: Ramon y Cajal, 1933Document2 pagesComputing With Dendrites: New Roles For Old Structures: Ramon y Cajal, 1933Anurag RanaNo ratings yet
- Over The Last CenturyDocument1 pageOver The Last CenturyAnurag RanaNo ratings yet
- MartianDocument1 pageMartianAnurag RanaNo ratings yet
- Apollo 11 Astronauts Neil Armstrong, Buzz Aldrin and Michael CollinsDocument1 pageApollo 11 Astronauts Neil Armstrong, Buzz Aldrin and Michael CollinsAnurag RanaNo ratings yet
- Communication Protocol: by Dr. M. RajaDocument19 pagesCommunication Protocol: by Dr. M. RajaAnurag RanaNo ratings yet
- Data Bus Comparison (A2)Document12 pagesData Bus Comparison (A2)Anurag RanaNo ratings yet
- ILS Instrument Landing SystemDocument25 pagesILS Instrument Landing SystemAnurag RanaNo ratings yet
- Alameda Investments - Alameda InvestmentsDocument9 pagesAlameda Investments - Alameda InvestmentsLuisNo ratings yet
- FermentationDocument23 pagesFermentationr_bharathi100% (2)
- Jobdesc Project Officer Intern TRACK SDGsDocument2 pagesJobdesc Project Officer Intern TRACK SDGssocmed gistiNo ratings yet
- Muac MunichaccDocument24 pagesMuac MunichaccDelavillièreNo ratings yet
- Analisis Pemetaan (Jadual Kenalpasti Cu Wa)Document5 pagesAnalisis Pemetaan (Jadual Kenalpasti Cu Wa)En AzermieyNo ratings yet
- Hell by D.L. MoodyDocument7 pagesHell by D.L. MoodyLisaNo ratings yet
- Cara Instal SeadasDocument7 pagesCara Instal SeadasIndah KurniawatiNo ratings yet
- Tuyển Sinh 10 - đề 1 -KeyDocument5 pagesTuyển Sinh 10 - đề 1 -Keynguyenhoang17042004No ratings yet
- Sensorless BLDCControl S08 MP16Document52 pagesSensorless BLDCControl S08 MP16Sachin PatilNo ratings yet
- Final Simple Research (BS CRIM. 1-ALPHA)Document5 pagesFinal Simple Research (BS CRIM. 1-ALPHA)Julius VeluntaNo ratings yet
- A Study On Financial Performance of Selected Public and Private Sector Banks - A Comparative AnalysisDocument3 pagesA Study On Financial Performance of Selected Public and Private Sector Banks - A Comparative AnalysisVarun NagarNo ratings yet
- Lesson Plan 8 (September) (AutoRecovered) 1Document3 pagesLesson Plan 8 (September) (AutoRecovered) 1Rutchie AbantoNo ratings yet
- N. Mixture, CombinationDocument2 pagesN. Mixture, CombinationYareniNo ratings yet
- Biology: NO Judul PengarangDocument5 pagesBiology: NO Judul Pengarangkartini11No ratings yet
- Federal University OtuokeDocument5 pagesFederal University OtuokeeteleruthNo ratings yet
- Lawrance Africa Imagined in The Spanish Renaissance - Henry Thomas LectureDocument20 pagesLawrance Africa Imagined in The Spanish Renaissance - Henry Thomas LecturejlawranceNo ratings yet
- MSFS Cessna Citation CJ4 Model 525C Operator's Guide (v1)Document92 pagesMSFS Cessna Citation CJ4 Model 525C Operator's Guide (v1)Matheus RochaNo ratings yet
- March 16 - IM Processors DigiTimesDocument5 pagesMarch 16 - IM Processors DigiTimesRyanNo ratings yet
- Stable Fixed Points of Card Trick FunctionsDocument10 pagesStable Fixed Points of Card Trick FunctionsDerekNo ratings yet
- C C P S: Lalit KumarDocument3 pagesC C P S: Lalit KumarAbhishek aby5No ratings yet
- AQU4518R4 DatasheetDocument2 pagesAQU4518R4 Datasheetcostin.bantoiuNo ratings yet
- Chapter 1 3 THESISDocument64 pagesChapter 1 3 THESISLyka Cartagena-Pandili Manalo-CabelloNo ratings yet
- Academic Journal Guide 2021-MethodologyDocument22 pagesAcademic Journal Guide 2021-MethodologySyedNo ratings yet
- RCHAPAC1 Eng 01 307567465Document2 pagesRCHAPAC1 Eng 01 307567465Hmg HamidiNo ratings yet
- Shahetal.2022 TecGeomorpJhelumDocument21 pagesShahetal.2022 TecGeomorpJhelumAyesha EjazNo ratings yet
- Sony Kdl-40xbr9 Kdl-46xbr9 Kdl-52xbr9 Ex2m ChassisDocument118 pagesSony Kdl-40xbr9 Kdl-46xbr9 Kdl-52xbr9 Ex2m ChassisAndy WilsonNo ratings yet
- InnerFiles Current Year PDF 2023Document687 pagesInnerFiles Current Year PDF 2023shravanibagul04No ratings yet
- Rikki Tikki Tavi Story Lesson PlanDocument3 pagesRikki Tikki Tavi Story Lesson Planapi-248341220No ratings yet
- Development of TOSRA (Test of Science Related Attitudes) Instrument For Science Related Attitude Studies in Sindh ProvinceDocument16 pagesDevelopment of TOSRA (Test of Science Related Attitudes) Instrument For Science Related Attitude Studies in Sindh ProvinceYhann Buyan GeverolaNo ratings yet
- TakeawayDocument6 pagesTakeawayWilman VasquezNo ratings yet