
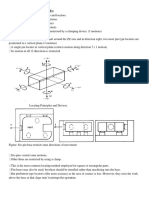
3-2-1 Principle
3-2-1 Principle
You might also like
- Indexing in MillingDocument32 pagesIndexing in MillingDevarakonda Kondayya50% (2)
- Catia Assembly TutorialDocument85 pagesCatia Assembly TutorialGrittyBurnsNo ratings yet
- Foot Step Bearing - DisasslyDocument1 pageFoot Step Bearing - DisasslyFahim Abdul Rahman100% (2)
- Injection Moulding ProcessDocument13 pagesInjection Moulding ProcessSACHIN SINGH 36No ratings yet
- Engineering Drawing: Missing View ProblemsDocument27 pagesEngineering Drawing: Missing View ProblemsEranti VenkateshNo ratings yet
- Clapper Block PDFDocument2 pagesClapper Block PDFParmeshwarPaul100% (1)
- Unit - 14 Progressive Tool: II. Multiple Choice QuestionsDocument4 pagesUnit - 14 Progressive Tool: II. Multiple Choice QuestionsMohammed AseerNo ratings yet
- Plastic University MCQ MergedDocument13 pagesPlastic University MCQ MergedChota ChatriNo ratings yet
- Unit 1 CadDocument29 pagesUnit 1 CadMuthuvel M82% (17)
- drwing-IIT Que-1 PDFDocument14 pagesdrwing-IIT Que-1 PDFNur Alam100% (1)
- Rapid Prototyping Question BankDocument2 pagesRapid Prototyping Question BankMeghavi ParmarNo ratings yet
- Syllabus For SolidWorks CourseDocument2 pagesSyllabus For SolidWorks CourseBen GuhmanNo ratings yet
- Machine Drawing With CADDocument227 pagesMachine Drawing With CADAhmed BdairNo ratings yet
- 6 Spring Back in Bending of Sheets and PlatesDocument5 pages6 Spring Back in Bending of Sheets and Platespkumar_824016No ratings yet
- Mechanical Drawing PDFDocument50 pagesMechanical Drawing PDFSagar KapadeNo ratings yet
- Design of Jigs, Fixtures and Press Tools - Department of Mechanical EngineeringDocument8 pagesDesign of Jigs, Fixtures and Press Tools - Department of Mechanical EngineeringLoga Nath100% (2)
- User Manual Solidworks Solidcam 5 Axis eDocument22 pagesUser Manual Solidworks Solidcam 5 Axis exags89gue89No ratings yet
- BIW - BeadsDocument2 pagesBIW - BeadsArvind97No ratings yet
- CAD-CAM Power Point PresentationDocument102 pagesCAD-CAM Power Point PresentationArgAshishGargNo ratings yet
- 12042-Mechanical Engineering Drawing PDFDocument13 pages12042-Mechanical Engineering Drawing PDFIshara Sanjeewa PereraNo ratings yet
- Pattern MaterialsDocument16 pagesPattern MaterialsMani Kandan100% (1)
- Chapter (5) Di Fsidl Dsidls T Design of Spindles and Spindle SupportsDocument16 pagesChapter (5) Di Fsidl Dsidls T Design of Spindles and Spindle Supportsabdullah 3mar abou reashaNo ratings yet
- Computer Applications in DesignDocument7 pagesComputer Applications in Designmskumar_5540% (1)
- Clapper BlockDocument2 pagesClapper BlockParmeshwarPaul100% (2)
- c15 Catia v5r17Document76 pagesc15 Catia v5r17Shubham HarleNo ratings yet
- SOLIDWORKS 2016 Weldment Assessment Score DetailsDocument6 pagesSOLIDWORKS 2016 Weldment Assessment Score DetailsTejas Mahadik100% (1)
- Lecture Slide Metrology and Inspection - PPT PDFDocument30 pagesLecture Slide Metrology and Inspection - PPT PDFEdo EdgarNo ratings yet
- Question Paper Tool DesignDocument1 pageQuestion Paper Tool DesignVishwas Shetty100% (1)
- Assembly Drawings Part-3Document19 pagesAssembly Drawings Part-3Parameswararao Billa100% (1)
- Metrology 2 Wire and 3 Wire Method Exp Manual PDFDocument9 pagesMetrology 2 Wire and 3 Wire Method Exp Manual PDFphanindra kumar100% (1)
- Gear Finishing MethodDocument9 pagesGear Finishing Methodpatel ketan50% (2)
- MT3493 Question Bank - MechDocument34 pagesMT3493 Question Bank - Mechmohan kumarNo ratings yet
- Forging Notes PDFDocument16 pagesForging Notes PDFkumarnpccNo ratings yet
- CAM Lab Manual 2019 PDFDocument54 pagesCAM Lab Manual 2019 PDFJay JoshiNo ratings yet
- Design and Analysis of PROTECTED FLANGE COUPLING Solidworks 2016 and ANSYS WorkbenchDocument27 pagesDesign and Analysis of PROTECTED FLANGE COUPLING Solidworks 2016 and ANSYS Workbenchamu100% (1)
- CATIA V5 TrainingDocument32 pagesCATIA V5 TrainingFaisal Naveed SiddiquiNo ratings yet
- DrawingpackagerobotarmDocument12 pagesDrawingpackagerobotarmapi-244906204No ratings yet
- Catia V5 QuestionsDocument66 pagesCatia V5 QuestionsBobby KiranNo ratings yet
- MP II - Lecture 3 - Thread and Gear ManufacturingDocument57 pagesMP II - Lecture 3 - Thread and Gear ManufacturingArif Hossain100% (1)
- Ug NXDocument4 pagesUg NX816623No ratings yet
- Part-B1-Petrol Engine Connecting RodDocument5 pagesPart-B1-Petrol Engine Connecting RodN Dhanunjaya Rao BorraNo ratings yet
- Warpage in Casting - A ReviewDocument7 pagesWarpage in Casting - A Reviewlaukik_rautNo ratings yet
- Design of Turning FixtureDocument23 pagesDesign of Turning FixtureDIPAK VINAYAK SHIRBHATE100% (1)
- Catia V5 FundamentalsDocument53 pagesCatia V5 Fundamentalsmecheneg100% (2)
- 321 RuleDocument4 pages321 RuleFayeq AlaminNo ratings yet
- Phys 7221 Homework # 8: Derivation 5-6: Torque Free Symmetric TopDocument14 pagesPhys 7221 Homework # 8: Derivation 5-6: Torque Free Symmetric TopPavan KumarNo ratings yet
- 3 2 1 Locating PrincipleDocument2 pages3 2 1 Locating PrinciplearamkhosroveNo ratings yet
- MathematicsDocument25 pagesMathematicsapi-3852915No ratings yet
- Coordinates in STAAD - ProDocument3 pagesCoordinates in STAAD - ProGiammarco negriniNo ratings yet
- Physics Challenge #1Document1 pagePhysics Challenge #1challapallinikhilNo ratings yet
- Tippe TopDocument8 pagesTippe TopAgustinaGonzálezNo ratings yet
- Chapter 11 (151-154)Document4 pagesChapter 11 (151-154)fitri auliaNo ratings yet
- Arce211structures 1 - +++Document143 pagesArce211structures 1 - +++Vijay KumarNo ratings yet
- Alexander R MuscleDocument26 pagesAlexander R MusclemiredmeNo ratings yet
- Tupling 1987 Cardan AnglesDocument6 pagesTupling 1987 Cardan Anglesdanasolav1798No ratings yet
- Space GroupsDocument149 pagesSpace GroupsBasharat AhmadNo ratings yet
- Eugeny A Mityushov Problems of A Disc PDFDocument9 pagesEugeny A Mityushov Problems of A Disc PDFChernet TugeNo ratings yet
- Appendix Rotations in 3-D: A.1 Coordinate FramesDocument5 pagesAppendix Rotations in 3-D: A.1 Coordinate FramesramopavelNo ratings yet
- Euler AnglesDocument14 pagesEuler Anglesbgn10101977No ratings yet
- Introduction To MechanismsDocument18 pagesIntroduction To MechanismsŤêk Mãñ JôśÿNo ratings yet
- Die CastingDocument6 pagesDie CastingAppu MukundanNo ratings yet
- Ultrasonic TestingDocument42 pagesUltrasonic TestingAppu MukundanNo ratings yet
- NDT Module 1Document51 pagesNDT Module 1Appu MukundanNo ratings yet
- Experimental Investigation On Mechanical Properties of Cyperus Pangorei Fibres - Jute Fibres Based Natural Fibre CompositesDocument31 pagesExperimental Investigation On Mechanical Properties of Cyperus Pangorei Fibres - Jute Fibres Based Natural Fibre CompositesAppu MukundanNo ratings yet
- Turning Fixtures 1Document40 pagesTurning Fixtures 1Appu MukundanNo ratings yet
- Radiographic TestingDocument51 pagesRadiographic TestingAppu MukundanNo ratings yet
- Investigation On The Mechanical Behavior of Areca Sheath Fibers/jute Fibers/glass Fabrics Reinforced Hybrid Composite For Light Weight ApplicationsDocument25 pagesInvestigation On The Mechanical Behavior of Areca Sheath Fibers/jute Fibers/glass Fabrics Reinforced Hybrid Composite For Light Weight ApplicationsAppu MukundanNo ratings yet
- Thermomechanical Characterization of Calotropis Gigantea Stem Powder-Filled Jute Fiber-Reinforced Epoxy CompositesDocument11 pagesThermomechanical Characterization of Calotropis Gigantea Stem Powder-Filled Jute Fiber-Reinforced Epoxy CompositesAppu MukundanNo ratings yet
- Bioresources.: Thermal Analysis of Bamboo Fibre and Its CompositesDocument13 pagesBioresources.: Thermal Analysis of Bamboo Fibre and Its CompositesAppu MukundanNo ratings yet
- Moulding Sand PropertyDocument6 pagesMoulding Sand PropertyAppu MukundanNo ratings yet
- Single Point Cutting Tool: A Presentation OnDocument16 pagesSingle Point Cutting Tool: A Presentation OnAppu MukundanNo ratings yet
- Sem Ref GoodDocument33 pagesSem Ref GoodAppu MukundanNo ratings yet
- Latheoperation 161203141450 PDFDocument11 pagesLatheoperation 161203141450 PDFAppu MukundanNo ratings yet
- Progress in Crystal Growth and Characterization of MaterialsDocument21 pagesProgress in Crystal Growth and Characterization of MaterialsAppu MukundanNo ratings yet
- Fluid Mechanics & Hydraulic Machines Lab: Laboratory ManualDocument1 pageFluid Mechanics & Hydraulic Machines Lab: Laboratory ManualAppu MukundanNo ratings yet
- Colour Coding of Patterns: Patterns Are Imparted Certain Colours and Shades in Order ToDocument1 pageColour Coding of Patterns: Patterns Are Imparted Certain Colours and Shades in Order ToAppu MukundanNo ratings yet
- Transfermoulding 180721115139Document13 pagesTransfermoulding 180721115139Appu MukundanNo ratings yet
- Recent Trends in Metallurgy, Materials Science and ManufacturingDocument2 pagesRecent Trends in Metallurgy, Materials Science and ManufacturingAppu MukundanNo ratings yet











































































Download as pptx, pdf, or txt
You might also like
- Indexing in MillingDocument32 pagesIndexing in MillingDevarakonda Kondayya50% (2)
- Catia Assembly TutorialDocument85 pagesCatia Assembly TutorialGrittyBurnsNo ratings yet
- Foot Step Bearing - DisasslyDocument1 pageFoot Step Bearing - DisasslyFahim Abdul Rahman100% (2)
- Injection Moulding ProcessDocument13 pagesInjection Moulding ProcessSACHIN SINGH 36No ratings yet
- Engineering Drawing: Missing View ProblemsDocument27 pagesEngineering Drawing: Missing View ProblemsEranti VenkateshNo ratings yet
- Clapper Block PDFDocument2 pagesClapper Block PDFParmeshwarPaul100% (1)
- Unit - 14 Progressive Tool: II. Multiple Choice QuestionsDocument4 pagesUnit - 14 Progressive Tool: II. Multiple Choice QuestionsMohammed AseerNo ratings yet
- Plastic University MCQ MergedDocument13 pagesPlastic University MCQ MergedChota ChatriNo ratings yet
- Unit 1 CadDocument29 pagesUnit 1 CadMuthuvel M82% (17)
- drwing-IIT Que-1 PDFDocument14 pagesdrwing-IIT Que-1 PDFNur Alam100% (1)
- Rapid Prototyping Question BankDocument2 pagesRapid Prototyping Question BankMeghavi ParmarNo ratings yet
- Syllabus For SolidWorks CourseDocument2 pagesSyllabus For SolidWorks CourseBen GuhmanNo ratings yet
- Machine Drawing With CADDocument227 pagesMachine Drawing With CADAhmed BdairNo ratings yet
- 6 Spring Back in Bending of Sheets and PlatesDocument5 pages6 Spring Back in Bending of Sheets and Platespkumar_824016No ratings yet
- Mechanical Drawing PDFDocument50 pagesMechanical Drawing PDFSagar KapadeNo ratings yet
- Design of Jigs, Fixtures and Press Tools - Department of Mechanical EngineeringDocument8 pagesDesign of Jigs, Fixtures and Press Tools - Department of Mechanical EngineeringLoga Nath100% (2)
- User Manual Solidworks Solidcam 5 Axis eDocument22 pagesUser Manual Solidworks Solidcam 5 Axis exags89gue89No ratings yet
- BIW - BeadsDocument2 pagesBIW - BeadsArvind97No ratings yet
- CAD-CAM Power Point PresentationDocument102 pagesCAD-CAM Power Point PresentationArgAshishGargNo ratings yet
- 12042-Mechanical Engineering Drawing PDFDocument13 pages12042-Mechanical Engineering Drawing PDFIshara Sanjeewa PereraNo ratings yet
- Pattern MaterialsDocument16 pagesPattern MaterialsMani Kandan100% (1)
- Chapter (5) Di Fsidl Dsidls T Design of Spindles and Spindle SupportsDocument16 pagesChapter (5) Di Fsidl Dsidls T Design of Spindles and Spindle Supportsabdullah 3mar abou reashaNo ratings yet
- Computer Applications in DesignDocument7 pagesComputer Applications in Designmskumar_5540% (1)
- Clapper BlockDocument2 pagesClapper BlockParmeshwarPaul100% (2)
- c15 Catia v5r17Document76 pagesc15 Catia v5r17Shubham HarleNo ratings yet
- SOLIDWORKS 2016 Weldment Assessment Score DetailsDocument6 pagesSOLIDWORKS 2016 Weldment Assessment Score DetailsTejas Mahadik100% (1)
- Lecture Slide Metrology and Inspection - PPT PDFDocument30 pagesLecture Slide Metrology and Inspection - PPT PDFEdo EdgarNo ratings yet
- Question Paper Tool DesignDocument1 pageQuestion Paper Tool DesignVishwas Shetty100% (1)
- Assembly Drawings Part-3Document19 pagesAssembly Drawings Part-3Parameswararao Billa100% (1)
- Metrology 2 Wire and 3 Wire Method Exp Manual PDFDocument9 pagesMetrology 2 Wire and 3 Wire Method Exp Manual PDFphanindra kumar100% (1)
- Gear Finishing MethodDocument9 pagesGear Finishing Methodpatel ketan50% (2)
- MT3493 Question Bank - MechDocument34 pagesMT3493 Question Bank - Mechmohan kumarNo ratings yet
- Forging Notes PDFDocument16 pagesForging Notes PDFkumarnpccNo ratings yet
- CAM Lab Manual 2019 PDFDocument54 pagesCAM Lab Manual 2019 PDFJay JoshiNo ratings yet
- Design and Analysis of PROTECTED FLANGE COUPLING Solidworks 2016 and ANSYS WorkbenchDocument27 pagesDesign and Analysis of PROTECTED FLANGE COUPLING Solidworks 2016 and ANSYS Workbenchamu100% (1)
- CATIA V5 TrainingDocument32 pagesCATIA V5 TrainingFaisal Naveed SiddiquiNo ratings yet
- DrawingpackagerobotarmDocument12 pagesDrawingpackagerobotarmapi-244906204No ratings yet
- Catia V5 QuestionsDocument66 pagesCatia V5 QuestionsBobby KiranNo ratings yet
- MP II - Lecture 3 - Thread and Gear ManufacturingDocument57 pagesMP II - Lecture 3 - Thread and Gear ManufacturingArif Hossain100% (1)
- Ug NXDocument4 pagesUg NX816623No ratings yet
- Part-B1-Petrol Engine Connecting RodDocument5 pagesPart-B1-Petrol Engine Connecting RodN Dhanunjaya Rao BorraNo ratings yet
- Warpage in Casting - A ReviewDocument7 pagesWarpage in Casting - A Reviewlaukik_rautNo ratings yet
- Design of Turning FixtureDocument23 pagesDesign of Turning FixtureDIPAK VINAYAK SHIRBHATE100% (1)
- Catia V5 FundamentalsDocument53 pagesCatia V5 Fundamentalsmecheneg100% (2)
- 321 RuleDocument4 pages321 RuleFayeq AlaminNo ratings yet
- Phys 7221 Homework # 8: Derivation 5-6: Torque Free Symmetric TopDocument14 pagesPhys 7221 Homework # 8: Derivation 5-6: Torque Free Symmetric TopPavan KumarNo ratings yet
- 3 2 1 Locating PrincipleDocument2 pages3 2 1 Locating PrinciplearamkhosroveNo ratings yet
- MathematicsDocument25 pagesMathematicsapi-3852915No ratings yet
- Coordinates in STAAD - ProDocument3 pagesCoordinates in STAAD - ProGiammarco negriniNo ratings yet
- Physics Challenge #1Document1 pagePhysics Challenge #1challapallinikhilNo ratings yet
- Tippe TopDocument8 pagesTippe TopAgustinaGonzálezNo ratings yet
- Chapter 11 (151-154)Document4 pagesChapter 11 (151-154)fitri auliaNo ratings yet
- Arce211structures 1 - +++Document143 pagesArce211structures 1 - +++Vijay KumarNo ratings yet
- Alexander R MuscleDocument26 pagesAlexander R MusclemiredmeNo ratings yet
- Tupling 1987 Cardan AnglesDocument6 pagesTupling 1987 Cardan Anglesdanasolav1798No ratings yet
- Space GroupsDocument149 pagesSpace GroupsBasharat AhmadNo ratings yet
- Eugeny A Mityushov Problems of A Disc PDFDocument9 pagesEugeny A Mityushov Problems of A Disc PDFChernet TugeNo ratings yet
- Appendix Rotations in 3-D: A.1 Coordinate FramesDocument5 pagesAppendix Rotations in 3-D: A.1 Coordinate FramesramopavelNo ratings yet
- Euler AnglesDocument14 pagesEuler Anglesbgn10101977No ratings yet
- Introduction To MechanismsDocument18 pagesIntroduction To MechanismsŤêk Mãñ JôśÿNo ratings yet
- Die CastingDocument6 pagesDie CastingAppu MukundanNo ratings yet
- Ultrasonic TestingDocument42 pagesUltrasonic TestingAppu MukundanNo ratings yet
- NDT Module 1Document51 pagesNDT Module 1Appu MukundanNo ratings yet
- Experimental Investigation On Mechanical Properties of Cyperus Pangorei Fibres - Jute Fibres Based Natural Fibre CompositesDocument31 pagesExperimental Investigation On Mechanical Properties of Cyperus Pangorei Fibres - Jute Fibres Based Natural Fibre CompositesAppu MukundanNo ratings yet
- Turning Fixtures 1Document40 pagesTurning Fixtures 1Appu MukundanNo ratings yet
- Radiographic TestingDocument51 pagesRadiographic TestingAppu MukundanNo ratings yet
- Investigation On The Mechanical Behavior of Areca Sheath Fibers/jute Fibers/glass Fabrics Reinforced Hybrid Composite For Light Weight ApplicationsDocument25 pagesInvestigation On The Mechanical Behavior of Areca Sheath Fibers/jute Fibers/glass Fabrics Reinforced Hybrid Composite For Light Weight ApplicationsAppu MukundanNo ratings yet
- Thermomechanical Characterization of Calotropis Gigantea Stem Powder-Filled Jute Fiber-Reinforced Epoxy CompositesDocument11 pagesThermomechanical Characterization of Calotropis Gigantea Stem Powder-Filled Jute Fiber-Reinforced Epoxy CompositesAppu MukundanNo ratings yet
- Bioresources.: Thermal Analysis of Bamboo Fibre and Its CompositesDocument13 pagesBioresources.: Thermal Analysis of Bamboo Fibre and Its CompositesAppu MukundanNo ratings yet
- Moulding Sand PropertyDocument6 pagesMoulding Sand PropertyAppu MukundanNo ratings yet
- Single Point Cutting Tool: A Presentation OnDocument16 pagesSingle Point Cutting Tool: A Presentation OnAppu MukundanNo ratings yet
- Sem Ref GoodDocument33 pagesSem Ref GoodAppu MukundanNo ratings yet
- Latheoperation 161203141450 PDFDocument11 pagesLatheoperation 161203141450 PDFAppu MukundanNo ratings yet
- Progress in Crystal Growth and Characterization of MaterialsDocument21 pagesProgress in Crystal Growth and Characterization of MaterialsAppu MukundanNo ratings yet
- Fluid Mechanics & Hydraulic Machines Lab: Laboratory ManualDocument1 pageFluid Mechanics & Hydraulic Machines Lab: Laboratory ManualAppu MukundanNo ratings yet
- Colour Coding of Patterns: Patterns Are Imparted Certain Colours and Shades in Order ToDocument1 pageColour Coding of Patterns: Patterns Are Imparted Certain Colours and Shades in Order ToAppu MukundanNo ratings yet
- Transfermoulding 180721115139Document13 pagesTransfermoulding 180721115139Appu MukundanNo ratings yet
- Recent Trends in Metallurgy, Materials Science and ManufacturingDocument2 pagesRecent Trends in Metallurgy, Materials Science and ManufacturingAppu MukundanNo ratings yet