Download as pptx, pdf, or txt
You might also like
- PDFDocument50 pagesPDFk_gh22No ratings yet
- Time Resolved Pulsed Laser Photolysis Study of The Rate Constant and Reaction Mechanism For Ru (Bpy) 32+ Phosphorescence Quenching by O2Document10 pagesTime Resolved Pulsed Laser Photolysis Study of The Rate Constant and Reaction Mechanism For Ru (Bpy) 32+ Phosphorescence Quenching by O2kjg51163824No ratings yet
- Laplace TransformDocument30 pagesLaplace Transformعبدالله الاشموريNo ratings yet
- Laplace TransformDocument37 pagesLaplace TransformAMIE Study Circle, RoorkeeNo ratings yet
- Math4 170513085146Document47 pagesMath4 170513085146jucar fernandezNo ratings yet
- Laplace Transform-1Document29 pagesLaplace Transform-1JatraNo ratings yet
- Ee602 LaplaceDocument76 pagesEe602 LaplaceRadhi MusaNo ratings yet
- LaplaceDocument173 pagesLaplaceOscar Brian OscarONo ratings yet
- Lec1 DR MohamedDocument25 pagesLec1 DR MohamedmmaherNo ratings yet
- IE474 Summer2022 Nise Ch2 PartA PDFDocument33 pagesIE474 Summer2022 Nise Ch2 PartA PDFAmon SimatwoNo ratings yet
- Laplace Transforms and Its Applications: Unit-IiiDocument68 pagesLaplace Transforms and Its Applications: Unit-IiiDiwakar ChauhanNo ratings yet
- LaplaceDocument22 pagesLaplaceKomal SinghNo ratings yet
- Mathematical Models of Control SystemsDocument37 pagesMathematical Models of Control SystemsmorilloatilioNo ratings yet
- Process Control 7Document45 pagesProcess Control 7ali AbbasNo ratings yet
- Ch15 - Laplace Transforms IDocument45 pagesCh15 - Laplace Transforms IdadsdNo ratings yet
- LaplaceTransform 1Document227 pagesLaplaceTransform 1Komborerai MuvhiringiNo ratings yet
- Introduction To The Laplace Transform: (Chapter 12)Document79 pagesIntroduction To The Laplace Transform: (Chapter 12)Trần VũNo ratings yet
- Modeling in Time DomainDocument30 pagesModeling in Time Domainfarouq_razzaz2574No ratings yet
- Control SystemDocument45 pagesControl SystemKelvin KongNo ratings yet
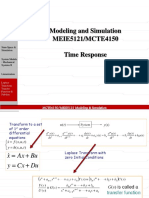
- Modeling and Simulation MEIE5121/MCTE4150 Time ResponseDocument31 pagesModeling and Simulation MEIE5121/MCTE4150 Time ResponsehazaaNo ratings yet
- Lesson #2 Lecture #1 Review of Laplace TransformDocument16 pagesLesson #2 Lecture #1 Review of Laplace TransformShazidNo ratings yet
- Module 2 Laplace TransformDocument13 pagesModule 2 Laplace TransformJohnnette AggabaoNo ratings yet
- Chapter (1) Laplace TransformDocument28 pagesChapter (1) Laplace TransformMohammed NabilNo ratings yet
- Laplace Transform (Updated 2018)Document29 pagesLaplace Transform (Updated 2018)Mohamad DuhokiNo ratings yet
- Ee202laplacetransform PDFDocument85 pagesEe202laplacetransform PDFFairusabdrNo ratings yet
- Chapter 4 (Laplace 17)Document33 pagesChapter 4 (Laplace 17)ibrahim muhammad yusufNo ratings yet
- Excellent Does Not An Accident, But It Comes Through A Hard Work!!Document108 pagesExcellent Does Not An Accident, But It Comes Through A Hard Work!!muhd munzirNo ratings yet
- Chapter 7Document75 pagesChapter 7narains81No ratings yet
- 27 Introduction To Laplace TransformsDocument21 pages27 Introduction To Laplace TransformsSadek AhmedNo ratings yet
- 27 Introduction To Laplace TransformsDocument21 pages27 Introduction To Laplace TransformsSadek AhmedNo ratings yet
- Chapter56 Laplace&TFDocument106 pagesChapter56 Laplace&TFfebri setyawanNo ratings yet
- 002 ME31002 - Transfer Function-2020decDocument28 pages002 ME31002 - Transfer Function-2020decShek Yu LaiNo ratings yet
- Lec 1Document23 pagesLec 1Abdulrahman AtefNo ratings yet
- Laplace HadyDocument52 pagesLaplace HadyT ANo ratings yet
- 02 Chapter 02Document60 pages02 Chapter 02Get CubeloNo ratings yet
- Unit-I 23 - 12 - 14Document157 pagesUnit-I 23 - 12 - 14Anonymous JDXbBDBNo ratings yet
- Chapter 6 PPT Slides vs3Document22 pagesChapter 6 PPT Slides vs3Sherif Aly100% (1)
- Blake Problem ComputationDocument42 pagesBlake Problem ComputationAnonymous pS4LT2GJUSNo ratings yet
- Laplace Transforms: Spsu Mathematics DepartmentDocument37 pagesLaplace Transforms: Spsu Mathematics DepartmentVinith GandhiNo ratings yet
- Laplace TransformDocument71 pagesLaplace Transformsshams5573No ratings yet
- Introduction 2Document32 pagesIntroduction 2pham tamNo ratings yet
- CommunicationsDocument44 pagesCommunicationsSaikrishnaNo ratings yet
- Review of Laplace Transform and Its Applications in Mechanical Engineering AnalysisDocument39 pagesReview of Laplace Transform and Its Applications in Mechanical Engineering AnalysisMathematics PointNo ratings yet
- 2-Mathematical Models of SystemsDocument42 pages2-Mathematical Models of SystemsKeiko AzizahNo ratings yet
- MAT231BT - Laplace TransformsDocument25 pagesMAT231BT - Laplace TransformsRochakNo ratings yet
- Introduction To Laplace TransformsDocument32 pagesIntroduction To Laplace TransformsAd Man GeTigNo ratings yet
- Ch2 Modeling in Frequency DomainDocument66 pagesCh2 Modeling in Frequency DomainWei-Hsin CheinNo ratings yet
- MATHII Week 2 Notes Sept 17Document5 pagesMATHII Week 2 Notes Sept 17DavidNo ratings yet
- Presentation On Laplace TransformsDocument36 pagesPresentation On Laplace TransformsRahul SinghNo ratings yet
- Bab 2 Transformasi Laplace: Mathematician and Astronomer Pierre-Simon LaplaceDocument31 pagesBab 2 Transformasi Laplace: Mathematician and Astronomer Pierre-Simon LaplaceRizqi Cahyo M PutraNo ratings yet
- Laplace FormulaDocument16 pagesLaplace Formulashubh.fincherNo ratings yet
- Unit-Vi: Mathematics-II (7HC16)Document32 pagesUnit-Vi: Mathematics-II (7HC16)Kola KeerthanaNo ratings yet
- UNIT - IV Laplace Transformations Class 1Document77 pagesUNIT - IV Laplace Transformations Class 1ksh98No ratings yet
- Laplace TransformDocument95 pagesLaplace Transformkac2872No ratings yet
- 5 - Laplace TransformDocument58 pages5 - Laplace TransformutpNo ratings yet
- Laplace Transform: BIOE 4200Document23 pagesLaplace Transform: BIOE 4200vasu_koneti5124No ratings yet
- Automatics and Automatic ControlDocument33 pagesAutomatics and Automatic ControlaliNo ratings yet
- Midterm Study ProblemDocument4 pagesMidterm Study ProblemTehe SaglamNo ratings yet
- Lecture Slides 04 Dynamic Response - Transient + Steady StateDocument144 pagesLecture Slides 04 Dynamic Response - Transient + Steady StateSakshi TiwariNo ratings yet
- Lecture Guide 3 - Laplace Transformation For Process ControlDocument17 pagesLecture Guide 3 - Laplace Transformation For Process ControlMariella SingsonNo ratings yet
- Laplace TransformDocument20 pagesLaplace TransformAHMAD FIRDAUS WAJDINo ratings yet
- COEG 304: Introduction: Definition of Control Systems, History andDocument24 pagesCOEG 304: Introduction: Definition of Control Systems, History andheroNo ratings yet
- 4 Transient Response 19 NovDocument90 pages4 Transient Response 19 NovheroNo ratings yet
- 5 Process Control Dec 8Document61 pages5 Process Control Dec 8heroNo ratings yet
- 8 DacDocument13 pages8 DacheroNo ratings yet
- 6 Analog Signal ConditioningDocument46 pages6 Analog Signal ConditioningheroNo ratings yet
- DigivibeMX 2018 v1Document7 pagesDigivibeMX 2018 v1daveNo ratings yet
- Third Term Science 5 Modules 1-4Document17 pagesThird Term Science 5 Modules 1-4Kathleen FernandezNo ratings yet
- SSAFactSheet Suntech 190wDocument2 pagesSSAFactSheet Suntech 190wJasonCeNo ratings yet
- Elsail Hybrid enDocument2 pagesElsail Hybrid enhongsunhuiNo ratings yet
- Amazing Stories v02n09 1927-12Document104 pagesAmazing Stories v02n09 1927-12pratolectusNo ratings yet
- Chapter 6 - Tutorial 11Document11 pagesChapter 6 - Tutorial 11kwong hkNo ratings yet
- Tiruvannamalai District Graph: 10 STD Mathematics-Algebra Ex 3.16Document14 pagesTiruvannamalai District Graph: 10 STD Mathematics-Algebra Ex 3.16PoomalaiNo ratings yet
- Exercise 2E: V U As V BDocument7 pagesExercise 2E: V U As V BPetro SoudahNo ratings yet
- Formation Damage PredictionDocument9 pagesFormation Damage Predictionrayan alkurdiNo ratings yet
- Fr3 Brochure - COOPERDocument8 pagesFr3 Brochure - COOPERHassenLNo ratings yet
- Moment Ext AnswersDocument4 pagesMoment Ext Answersapi-200073732No ratings yet
- Module 2 NotesDocument31 pagesModule 2 NotesSANJAY KUMAR SAMANTARAYNo ratings yet
- MSci 4261 Advanced EM Theory Lecture Notes 8 of 11Document6 pagesMSci 4261 Advanced EM Theory Lecture Notes 8 of 11ucaptd3No ratings yet
- Solved Problems From GriffithsDocument4 pagesSolved Problems From GriffithsTushti PatelNo ratings yet
- SDM 102 eDocument24 pagesSDM 102 eseaqu3stNo ratings yet
- Fibra de CarbonoDocument2 pagesFibra de CarbonoJose Carlos OcañaNo ratings yet
- UH 2 Explanation Text Test & Interpreting A Song Lyric (Jawaban)Document23 pagesUH 2 Explanation Text Test & Interpreting A Song Lyric (Jawaban)YsfaNo ratings yet
- AMBIAL PW - Catalogue PDFDocument110 pagesAMBIAL PW - Catalogue PDFSREERAG V KNo ratings yet
- Mos Field Effect Transistor: Preliminary Data SheetDocument5 pagesMos Field Effect Transistor: Preliminary Data SheetEduRoiNo ratings yet
- NAT Review Pre TestDocument6 pagesNAT Review Pre TestCher Z 2No ratings yet
- Introduction For Thesis DefenseDocument5 pagesIntroduction For Thesis Defensesamanthareedbillings100% (2)
- Trigonometric Leveling - Heights and Distances Problem (Two Exercises)Document1 pageTrigonometric Leveling - Heights and Distances Problem (Two Exercises)RadhaAnanthalekshmiNo ratings yet
- Vulnerability Assessment of Lifelines and Essential Facilities (WP06) : Methodological HandbookDocument35 pagesVulnerability Assessment of Lifelines and Essential Facilities (WP06) : Methodological HandbookJuan Carlos Jiménez PachecoNo ratings yet
- Dubai-IIE Nr. 4 Self Cleaning Heat ExchangerDocument15 pagesDubai-IIE Nr. 4 Self Cleaning Heat ExchangerevrimkNo ratings yet
- Edexcel International GCSE Physics 2022 Paper PDocument5 pagesEdexcel International GCSE Physics 2022 Paper PReckanaterNo ratings yet
- Heat Transfer T1 Formula SheetDocument5 pagesHeat Transfer T1 Formula SheetJosh PageNo ratings yet
- Assign 3Document1 pageAssign 3PamithaNo ratings yet
- Sheet 4: Problem 1Document2 pagesSheet 4: Problem 1tarrooqNo ratings yet