Download as pptx, pdf, or txt
You might also like
- EEE 101 - Lect23Document12 pagesEEE 101 - Lect23Basim AlthafNo ratings yet
- AC DC AcDocument3 pagesAC DC AcPhani KumarNo ratings yet
- Chapter 1-Magnetic Circuits PDFDocument88 pagesChapter 1-Magnetic Circuits PDFkessam92100% (1)
- Taylor Series in ChemistryDocument4 pagesTaylor Series in ChemistryAndreea DărîngăNo ratings yet
- Subharmonic and Superharmonic Oscillations (Rao)Document5 pagesSubharmonic and Superharmonic Oscillations (Rao)Amir100% (3)
- Electrical Machines - 1Document256 pagesElectrical Machines - 1ronoedgar13No ratings yet
- Vibrations and Its Types: Presented By: Er. Sahil Sharma Department of Civil EngineeringDocument12 pagesVibrations and Its Types: Presented By: Er. Sahil Sharma Department of Civil EngineeringSaHil ShaRmaNo ratings yet
- Chapter 1 - Magnetic CircuitsDocument35 pagesChapter 1 - Magnetic CircuitsJasmine MaisaraNo ratings yet
- ME8501 - Metrology and Measurements - Unit - IDocument30 pagesME8501 - Metrology and Measurements - Unit - Iarunpdc100% (1)
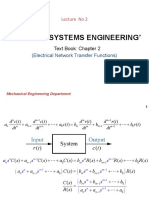
- Lecture 02 Electrical Networks Transfer FunctionDocument18 pagesLecture 02 Electrical Networks Transfer FunctionRammay SbNo ratings yet
- Basics of Electrical Engineering - A Text Book For First Year B Tech Students of Engineering (All Specializations)Document11 pagesBasics of Electrical Engineering - A Text Book For First Year B Tech Students of Engineering (All Specializations)ArfaNo ratings yet
- Circuit Theory - Solved Assignments - Semester Fall 2003Document35 pagesCircuit Theory - Solved Assignments - Semester Fall 2003Muhammad UmairNo ratings yet
- Power Distribution Systems and Its CharacteristicsDocument50 pagesPower Distribution Systems and Its CharacteristicsquangspktNo ratings yet
- Boiler Automation Using Programmable Logic ControlDocument29 pagesBoiler Automation Using Programmable Logic Controlx-robot78% (9)
- Lecture 1 Introduction To Power Distribution SystemsDocument53 pagesLecture 1 Introduction To Power Distribution SystemsMohammed ShifulNo ratings yet
- NyquistDocument25 pagesNyquistHosein KerdarNo ratings yet
- DC Servo MotorDocument6 pagesDC Servo MotortaindiNo ratings yet
- MMT I Lab#07Document5 pagesMMT I Lab#07Abdul WahabNo ratings yet
- Lecture 4 - 6 - Quantization and Reconstruction PDFDocument97 pagesLecture 4 - 6 - Quantization and Reconstruction PDFMohammad0% (1)
- PotentiometersDocument23 pagesPotentiometersbhaskaratarun239bNo ratings yet
- EE306 Power System Analysis Hadi SaadatDocument18 pagesEE306 Power System Analysis Hadi SaadatGayathri S. NairNo ratings yet
- Potentiometer Working PricipleDocument3 pagesPotentiometer Working PricipleEti-ini AkpanNo ratings yet
- Lagrange Equations: Use Kinetic and Potential Energy To Solve For Motion!Document32 pagesLagrange Equations: Use Kinetic and Potential Energy To Solve For Motion!Ribal KhreisNo ratings yet
- DC Motor - Drive 2019Document80 pagesDC Motor - Drive 2019ali ramadanNo ratings yet
- AM Unit-4Document177 pagesAM Unit-4tyagaraju batchalaNo ratings yet
- Stability Analysis of Nonlinear Systems Using Lyapunov Theory - IDocument28 pagesStability Analysis of Nonlinear Systems Using Lyapunov Theory - IGurpreet KaurNo ratings yet
- Mathematical Modeling of Mechanical Systems and Electrical SystemsDocument49 pagesMathematical Modeling of Mechanical Systems and Electrical SystemsMary DunhamNo ratings yet
- EngineeringmechanicsDocument61 pagesEngineeringmechanicsparameshNo ratings yet
- Chapter 9 SensorsDocument48 pagesChapter 9 Sensorsامجد الغالبيNo ratings yet
- Engineering Practices Laboratory: Lab ManualDocument51 pagesEngineering Practices Laboratory: Lab ManualKarthikeyan100% (1)
- To Investigate Band Study The Effect of Varying The Current and The Voltage On The Arc Welded SpecimenDocument5 pagesTo Investigate Band Study The Effect of Varying The Current and The Voltage On The Arc Welded SpecimenRao MaazNo ratings yet
- CISE 316 Control Systems Design Lab ManualDocument78 pagesCISE 316 Control Systems Design Lab Manualnirmal_inbox100% (1)
- Solenoid Lab ManualDocument17 pagesSolenoid Lab Manualbrandon999No ratings yet
- 3 Line ConverterDocument10 pages3 Line ConverterJay Romar PabianiaNo ratings yet
- Condition Assessment of Transformer by Park's Vector and Symmetrical Components To Detect Inter Turn FaultDocument6 pagesCondition Assessment of Transformer by Park's Vector and Symmetrical Components To Detect Inter Turn FaultdimasairlanggaNo ratings yet
- Cs Pole Placement DesignDocument15 pagesCs Pole Placement Design18U208 - ARJUN A100% (1)
- Circuit Theory - WikimediaDocument93 pagesCircuit Theory - Wikimediam_sakaryaNo ratings yet
- Maximum Power Transfer Theorem - GATE Study Material in PDFDocument10 pagesMaximum Power Transfer Theorem - GATE Study Material in PDFNarendra AgrawalNo ratings yet
- Electronics Lab Manual: Schedule & Experiment No. (Title) Tentative WeekDocument6 pagesElectronics Lab Manual: Schedule & Experiment No. (Title) Tentative Weekabubakarsha100% (1)
- Transportation LagDocument10 pagesTransportation LagImran Unar100% (1)
- Unit 27 Static Mech Principles Assignment 1Document4 pagesUnit 27 Static Mech Principles Assignment 1teat46441No ratings yet
- Electrical Machinery by Dr. P S BimbhraDocument339 pagesElectrical Machinery by Dr. P S BimbhraNikhilNo ratings yet
- Lecture Notes On SYNCHRONOUS GENERATORDocument72 pagesLecture Notes On SYNCHRONOUS GENERATORJeremiahNo ratings yet
- Pressure MeasurementDocument24 pagesPressure MeasurementOssy DewintaNo ratings yet
- Transducer Curriculum Manual PDFDocument366 pagesTransducer Curriculum Manual PDFAugusto GarciaNo ratings yet
- Laplace Transform Numerical InversionDocument18 pagesLaplace Transform Numerical InversionIslam ZewainNo ratings yet
- Chapter 4 1st Law of ThermodynamicsDocument46 pagesChapter 4 1st Law of ThermodynamicsEmadudin AbdulkaderNo ratings yet
- Natural Response of An RC CircuitDocument6 pagesNatural Response of An RC CircuitPaolo CastillonNo ratings yet
- Senior Class FormulaeDocument8 pagesSenior Class FormulaeOP GuptaNo ratings yet
- Chapter 12Document23 pagesChapter 12sachin235No ratings yet
- Power Electronics and Energy Conversion Systems, Fundamentals and Hard-switching ConvertersFrom EverandPower Electronics and Energy Conversion Systems, Fundamentals and Hard-switching ConvertersNo ratings yet
- Lecture NoteDocument183 pagesLecture NoteDele OdezNo ratings yet
- Analysis of Mechanical SystemDocument16 pagesAnalysis of Mechanical SystembigbangNo ratings yet
- Mathematical Modelling of Control System: BY Saurabh KorgaonkarDocument26 pagesMathematical Modelling of Control System: BY Saurabh Korgaonkar16 - Dimplekunwar SolankiNo ratings yet
- Chap 2 2 Mech Sys 2Document49 pagesChap 2 2 Mech Sys 2Furkan DedeNo ratings yet
- Control 1 NotesDocument14 pagesControl 1 NotesGatheru NjorogeNo ratings yet
- Week 1 Vibration IntroductionDocument22 pagesWeek 1 Vibration IntroductionSaya SantornoNo ratings yet
- Chapter 6 Electrical Systems and (Lec-15Document41 pagesChapter 6 Electrical Systems and (Lec-15Mohammed AlqbahNo ratings yet
- Lecture 2b ModelingDocument40 pagesLecture 2b ModelingCharles CalibreNo ratings yet
- Principios Básicos ActuadoresDocument108 pagesPrincipios Básicos ActuadoresJonathan TerrónNo ratings yet
- Faculty of Mechanical Engineering: Jimma Institute of TechnologyDocument56 pagesFaculty of Mechanical Engineering: Jimma Institute of TechnologyWabe KemalNo ratings yet
- Chapter Two Literature Review: The First ProjectsDocument8 pagesChapter Two Literature Review: The First ProjectsWabe KemalNo ratings yet
- Design and Development of Agricultural Pesticide Spraying Drone Chapter One 1.1 DefinitionDocument4 pagesDesign and Development of Agricultural Pesticide Spraying Drone Chapter One 1.1 DefinitionWabe KemalNo ratings yet
- Chapter 4 Digital LogicDocument27 pagesChapter 4 Digital LogicWabe KemalNo ratings yet
- Working PrincipleDocument4 pagesWorking PrincipleWabe KemalNo ratings yet
- Steel Composite I Girder Bridge Design in LSM by IRC CodeDocument493 pagesSteel Composite I Girder Bridge Design in LSM by IRC CodeStructural Spreadsheets100% (1)
- Energy Meter CalibrationDocument20 pagesEnergy Meter CalibrationMOHSIN_IIUINo ratings yet
- Technical Seminar Report (Word) - 1MJ18AE098Document24 pagesTechnical Seminar Report (Word) - 1MJ18AE098Prasanna Pk0% (1)
- Computational Techniques in Civil EngineeringDocument30 pagesComputational Techniques in Civil EngineeringGaurav Devkota100% (3)
- Design Considerations of High Voltage AnDocument114 pagesDesign Considerations of High Voltage AnEL BRIGHLINo ratings yet
- Pipe SizingDocument29 pagesPipe SizingLexus Zander RambaudNo ratings yet
- Drill Monitoring For Rock Mass Grouting: Case Study at The Stockholm BypassDocument12 pagesDrill Monitoring For Rock Mass Grouting: Case Study at The Stockholm BypassPato IrfanNo ratings yet
- 3 - Effect of Density On Draft and DisplacementDocument19 pages3 - Effect of Density On Draft and DisplacementAgus SiswantoNo ratings yet
- Reaction Calorimetry: Hazard Evaluation LaboratoryDocument8 pagesReaction Calorimetry: Hazard Evaluation LaboratorySidda LingeshaNo ratings yet
- Chapter 4: Integrals: by Assoc - Prof. Mai Duc ThanhDocument23 pagesChapter 4: Integrals: by Assoc - Prof. Mai Duc ThanhTriet TruongNo ratings yet
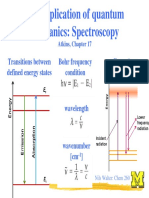
- The Application of Quantum Mechanics: SpectrosDocument7 pagesThe Application of Quantum Mechanics: SpectrosRa saNo ratings yet
- General Mathematics Sample Periodical ExamDocument15 pagesGeneral Mathematics Sample Periodical ExamKyla GenetaNo ratings yet
- On Null Controllability of Nonlinear Neutral-Type Fractional-Order Differential Systems With State Delays and Distributed Delays in The Control, and Impulsive EffectsDocument16 pagesOn Null Controllability of Nonlinear Neutral-Type Fractional-Order Differential Systems With State Delays and Distributed Delays in The Control, and Impulsive EffectsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Question 1Document8 pagesQuestion 1abdul wahabNo ratings yet
- Physics Light Ch-10 Notes Class 10 2023-24 by DFHDocument7 pagesPhysics Light Ch-10 Notes Class 10 2023-24 by DFHdipanshu official Dada100% (1)
- Engr. Mark Christian D. EsguerraDocument1 pageEngr. Mark Christian D. EsguerraMARKCHRISTMASNo ratings yet
- 8th - ICSE - TEST PAPER MATH - 23 - Dec - 2023Document2 pages8th - ICSE - TEST PAPER MATH - 23 - Dec - 2023sushskyNo ratings yet
- Stiff OdeDocument25 pagesStiff OdeBereket HidoNo ratings yet
- Ejw ADocument1 pageEjw Ahudiono cahyonoNo ratings yet
- Phy1 - Lab 5Document8 pagesPhy1 - Lab 5Hasin MahtabNo ratings yet
- Nelson SPWLA 1994 V35n3a4Document37 pagesNelson SPWLA 1994 V35n3a4ridha hNo ratings yet
- 2.3 Double Integral in Polar Coordinates: F (X, Y) Da, Where R Is One ofDocument8 pages2.3 Double Integral in Polar Coordinates: F (X, Y) Da, Where R Is One ofsimon georgeNo ratings yet
- Ballistics - Types of BulletsDocument12 pagesBallistics - Types of BulletsKotaro YNo ratings yet
- Coordinate Measuring MachinesDocument30 pagesCoordinate Measuring MachinesAliNo ratings yet
- Spur Gear Design Some New Perspectives DDocument12 pagesSpur Gear Design Some New Perspectives DUsama GulzarNo ratings yet
- Mr. Sontaya Pojid: Personal InformationDocument7 pagesMr. Sontaya Pojid: Personal InformationNatthawut KentharaphakNo ratings yet
- Metaestable Vs Stable SolidificationDocument25 pagesMetaestable Vs Stable SolidificationEnrique Castro AldamaNo ratings yet
- A450 - EN - Rev.1 Car Dashboard Polish SpecsDocument1 pageA450 - EN - Rev.1 Car Dashboard Polish SpecsWeldon KipyegonNo ratings yet
- PE175BF Lampara XenonDocument2 pagesPE175BF Lampara Xenonfrancheska bacaNo ratings yet