Download as pptx, pdf, or txt
You might also like
- Mathematical Modeling of Control System Assignment NewDocument8 pagesMathematical Modeling of Control System Assignment NewJawad SandhuNo ratings yet
- A-level Physics Revision: Cheeky Revision ShortcutsFrom EverandA-level Physics Revision: Cheeky Revision ShortcutsRating: 3 out of 5 stars3/5 (10)
- 006 PDFDocument8 pages006 PDFTrisha SARMIENTONo ratings yet
- Transfer Function and Mathematical ModelingDocument32 pagesTransfer Function and Mathematical ModelingsivaramNo ratings yet
- Mechanical Systems 3Document34 pagesMechanical Systems 3sidkhan1No ratings yet
- ELG4112L505Document28 pagesELG4112L505jthanikNo ratings yet
- To RsionDocument16 pagesTo Rsionpriodeep chowdhuryNo ratings yet
- Modeling of Mechanical Systems:: Three - Mass, Spring and Dashpot or DamperDocument6 pagesModeling of Mechanical Systems:: Three - Mass, Spring and Dashpot or Dampermohammed zaidNo ratings yet
- Me 2401 Mechatronics: Unit Iii System Models and ControllersDocument46 pagesMe 2401 Mechatronics: Unit Iii System Models and ControllersPANNERSELVAM50% (2)
- CFD at Chapter-1Document23 pagesCFD at Chapter-1Pawan KumarNo ratings yet
- Control System 2Document19 pagesControl System 2Gabriel GalizaNo ratings yet
- Nouveau Microsoft Word DocumentDocument7 pagesNouveau Microsoft Word DocumentRIDA shopNo ratings yet
- Dynamic SystemDocument28 pagesDynamic SystemA - STARNo ratings yet
- Chapter 3Document31 pagesChapter 3Frank JohnNo ratings yet
- ME 2213 (Inertia Forces in Reciprocating Parts) (1) (2 Files Merged)Document53 pagesME 2213 (Inertia Forces in Reciprocating Parts) (1) (2 Files Merged)tanvir2013004No ratings yet
- Control 1 NotesDocument14 pagesControl 1 NotesGatheru NjorogeNo ratings yet
- TorsionDocument44 pagesTorsionPrabhjyot SinghNo ratings yet
- Block Diagrams: Modeling and SimulationDocument48 pagesBlock Diagrams: Modeling and SimulationAbel CabaNo ratings yet
- Week 12 - Impulse+Momentum+ImpactDocument56 pagesWeek 12 - Impulse+Momentum+Impactiwhy_No ratings yet
- Applied Marine Control Systems and AutomationDocument15 pagesApplied Marine Control Systems and AutomationSrinivasan PrakashNo ratings yet
- Oscillations - WavesDocument29 pagesOscillations - WavesradhjasraNo ratings yet
- Modelling Phtsical SystemsDocument9 pagesModelling Phtsical SystemsHüseyin Murat PolaterNo ratings yet
- Physics 2 - Lecture 13,14,15,16 - Fall2023-24Document38 pagesPhysics 2 - Lecture 13,14,15,16 - Fall2023-24muntasirtoqi555No ratings yet
- Mechanics of Rigid BodyDocument21 pagesMechanics of Rigid Bodyhenzel espinaNo ratings yet
- Torque Measurement (Torsion Meters)Document6 pagesTorque Measurement (Torsion Meters)Raghvendra Singh ShaktawatNo ratings yet
- Assignment 3Document8 pagesAssignment 319ME010 BARATH.PNo ratings yet
- OscillationsDocument7 pagesOscillationsjayashriparida09No ratings yet
- Class 5 Mechanical Systems (Both Translation and Rotational)Document22 pagesClass 5 Mechanical Systems (Both Translation and Rotational)Acharya Mascara PlaudoNo ratings yet
- Basic Elements of Control System: 1. Open-Loop SystemsDocument58 pagesBasic Elements of Control System: 1. Open-Loop SystemssrinivasanNo ratings yet
- Dom - 2marks MinimumDocument4 pagesDom - 2marks MinimumRobinston Jeyasingh KNo ratings yet
- Oscillations: Manish S. Lokur Xi, Kendriya Vidyalaya DharwadDocument33 pagesOscillations: Manish S. Lokur Xi, Kendriya Vidyalaya Dharwadmanish2443687No ratings yet
- Simple Harmonic Motion NotesDocument9 pagesSimple Harmonic Motion Noteslouis parchmentNo ratings yet
- TMC UNIT1 Impact of JetDocument45 pagesTMC UNIT1 Impact of JetKranium ANo ratings yet
- Week 1 Vibration IntroductionDocument22 pagesWeek 1 Vibration IntroductionSaya SantornoNo ratings yet
- Solved SOM1Document11 pagesSolved SOM1Subhan FarooqiNo ratings yet
- Simple Harmonic MotionDocument23 pagesSimple Harmonic MotionAsif AliNo ratings yet
- Chapter V - Momentum EquationDocument16 pagesChapter V - Momentum EquationOmar Ashraf 3amerNo ratings yet
- DS - Lec 1Document7 pagesDS - Lec 1Sherif SaidNo ratings yet
- Torque Measurement... : Mechanical Dynamometers.. S.SANJAY (18P221)Document52 pagesTorque Measurement... : Mechanical Dynamometers.. S.SANJAY (18P221)vijay AmirtharajNo ratings yet
- Chapter 10 Rotation of Rigid BodyDocument22 pagesChapter 10 Rotation of Rigid BodylozzzzzNo ratings yet
- ProjectDocument24 pagesProjectJRNo ratings yet
- Mechatronics-191Me74 Assignment - 2: BY T.KARUTHAPANDI (19ME040) Mech - 1 Vi-YearDocument9 pagesMechatronics-191Me74 Assignment - 2: BY T.KARUTHAPANDI (19ME040) Mech - 1 Vi-Year19ME010 BARATH.PNo ratings yet
- Chapter Two: Mathematical Modeling of Physical SystemsDocument29 pagesChapter Two: Mathematical Modeling of Physical SystemsWabe KemalNo ratings yet
- CLUTCHDocument22 pagesCLUTCHAnuj AwasthiNo ratings yet
- Circular MotionDocument42 pagesCircular Motionmonsterrider135No ratings yet
- Physics Chapter 15 OscillationsDocument37 pagesPhysics Chapter 15 Oscillationshidrovo3589100% (1)
- Lecture 2 and 3Document13 pagesLecture 2 and 3Abel OmweriNo ratings yet
- Quadcopter Dynamics, Simulation, and ControlDocument18 pagesQuadcopter Dynamics, Simulation, and Controldemos2011No ratings yet
- Chap 2 2 Mech Sys 2Document49 pagesChap 2 2 Mech Sys 2Furkan DedeNo ratings yet
- Simple Harmonic Motion (SHM)Document19 pagesSimple Harmonic Motion (SHM)Alisa DowningNo ratings yet
- Chapter 4 - Lecture NotesDocument15 pagesChapter 4 - Lecture NotesZairul IzwanNo ratings yet
- 7 Systems of Particles & Rot. MotionDocument10 pages7 Systems of Particles & Rot. MotionLalitha GorantlaNo ratings yet
- 3 AC Responses of Circuit ElementsDocument8 pages3 AC Responses of Circuit ElementstinymairaNo ratings yet
- Section - Mathematical Modeling of Mechanical SystemsDocument13 pagesSection - Mathematical Modeling of Mechanical SystemsMandolinNo ratings yet
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11From EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11No ratings yet
- Activity12 1Document1 pageActivity12 1Trisha SARMIENTONo ratings yet
- 008 PDFDocument8 pages008 PDFTrisha SARMIENTONo ratings yet
- Aro Experiment8 Subtracters PDFDocument5 pagesAro Experiment8 Subtracters PDFTrisha SARMIENTONo ratings yet
- 006 PDFDocument8 pages006 PDFTrisha SARMIENTONo ratings yet
- Experiment - 7 - Full Adders PDFDocument3 pagesExperiment - 7 - Full Adders PDFTrisha SARMIENTONo ratings yet
- Philippine Airlines PDFDocument3 pagesPhilippine Airlines PDFTrisha SARMIENTONo ratings yet
- Aro Experiment 7 PDFDocument6 pagesAro Experiment 7 PDFTrisha SARMIENTONo ratings yet
- 005 PDFDocument13 pages005 PDFTrisha SARMIENTONo ratings yet
- Experiment 8 Subtracters PDFDocument3 pagesExperiment 8 Subtracters PDFTrisha SARMIENTONo ratings yet
- Elmachi1 - Lecture6 (Electrical Machines - Part 1)Document17 pagesElmachi1 - Lecture6 (Electrical Machines - Part 1)Trisha SARMIENTONo ratings yet
- 007 PDFDocument7 pages007 PDFTrisha SARMIENTONo ratings yet
- The Board Shall Exercise The Powers Conferred Upon ItDocument11 pagesThe Board Shall Exercise The Powers Conferred Upon ItTrisha SARMIENTONo ratings yet
- 009 PDFDocument10 pages009 PDFTrisha SARMIENTONo ratings yet
- 004 PDFDocument11 pages004 PDFTrisha SARMIENTONo ratings yet
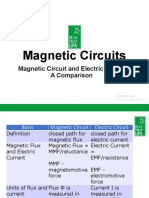
- Magnetic Circuits: Magnetic Circuit and Electric Circuit: A ComparisonDocument13 pagesMagnetic Circuits: Magnetic Circuit and Electric Circuit: A ComparisonTrisha SARMIENTONo ratings yet
- 002 PDFDocument9 pages002 PDFTrisha SARMIENTONo ratings yet
- Mechanical Translation SystemsDocument13 pagesMechanical Translation SystemsTrisha SARMIENTONo ratings yet
- Electrical Systems: de La Salle Lipa College of Information Technology and Engineering Electrical Engineering DepartmentDocument11 pagesElectrical Systems: de La Salle Lipa College of Information Technology and Engineering Electrical Engineering DepartmentTrisha SARMIENTONo ratings yet
- Gear Systems: de La Salle Lipa College of Information Technology and Engineering Electrical Engineering DepartmentDocument7 pagesGear Systems: de La Salle Lipa College of Information Technology and Engineering Electrical Engineering DepartmentTrisha SARMIENTONo ratings yet
- Elmachi1 - Lecture1 (Review of Electromagnetics - Part 1Document9 pagesElmachi1 - Lecture1 (Review of Electromagnetics - Part 1Trisha SARMIENTONo ratings yet
- Transfer Function: de La Salle Lipa College of Information Technology and Engineering Electrical Engineering DepartmentDocument10 pagesTransfer Function: de La Salle Lipa College of Information Technology and Engineering Electrical Engineering DepartmentTrisha SARMIENTONo ratings yet
- Electromechanical SystemsDocument8 pagesElectromechanical SystemsTrisha SARMIENTONo ratings yet
- Elmachi1 - Lecture7 (Electrical Machines - Part 2)Document12 pagesElmachi1 - Lecture7 (Electrical Machines - Part 2)Trisha SARMIENTONo ratings yet
- Elmachi1 - Lecture2 (Review of Electromagnetics - Part 2)Document19 pagesElmachi1 - Lecture2 (Review of Electromagnetics - Part 2)Trisha SARMIENTONo ratings yet
- DC Machines: Classification ConstructionDocument15 pagesDC Machines: Classification ConstructionTrisha SARMIENTONo ratings yet
- Elmachi1 - Lecture8 (Electrical Machines - Part 3)Document11 pagesElmachi1 - Lecture8 (Electrical Machines - Part 3)Trisha SARMIENTONo ratings yet
- Elmachi1 - Lecture10 (Armature Winding - Part 1)Document10 pagesElmachi1 - Lecture10 (Armature Winding - Part 1)Trisha SARMIENTONo ratings yet
- Elmachi1 - Lecture11 (Armature Winding - Part 2)Document19 pagesElmachi1 - Lecture11 (Armature Winding - Part 2)Trisha SARMIENTONo ratings yet
- Elmachi1 - Lecture15 - (Shunt Generator Under Load)Document9 pagesElmachi1 - Lecture15 - (Shunt Generator Under Load)Trisha SARMIENTONo ratings yet
- Elmachi1 - Lecture12 (Working Principle of A DC Generator)Document6 pagesElmachi1 - Lecture12 (Working Principle of A DC Generator)Trisha SARMIENTONo ratings yet