Download as ppt, pdf, or txt
You might also like
- Control QuestionsDocument11 pagesControl Questionsahmed elbialyNo ratings yet
- Operational Amplifiers: Brandon Borm Shelley Nation Chloe MilionDocument33 pagesOperational Amplifiers: Brandon Borm Shelley Nation Chloe MilionrakibNo ratings yet
- Analogue Electronics: - Operational AmplifiersDocument46 pagesAnalogue Electronics: - Operational AmplifiersNimsiri AbhayasingheNo ratings yet
- EIE2100 Introduction To Operation AmplifiersDocument47 pagesEIE2100 Introduction To Operation AmplifiersP ChiNo ratings yet
- ECE131 UNIT5 Part3Document88 pagesECE131 UNIT5 Part3abhi shek100% (1)
- Unit-IV - OP-AMP and Its ApplicationsDocument64 pagesUnit-IV - OP-AMP and Its ApplicationsJadhav BhagavatNo ratings yet
- Operational AmplifiersDocument56 pagesOperational AmplifiersRupert Rosel AmatorioNo ratings yet
- OpAmp F10Document32 pagesOpAmp F10Suguna PriyaNo ratings yet
- Operational Amplifiers: David Lomax Azeem Meruani Gautam JadhavDocument28 pagesOperational Amplifiers: David Lomax Azeem Meruani Gautam JadhavJaideep SinghNo ratings yet
- Lec 8 - Biomedical Amplifiers PDFDocument43 pagesLec 8 - Biomedical Amplifiers PDFSamama khanNo ratings yet
- Operational Amplifiers: David Lomax Azeem Meruani Gautam JadhavDocument28 pagesOperational Amplifiers: David Lomax Azeem Meruani Gautam JadhavSrijan ThakurNo ratings yet
- Net PhysicsDocument25 pagesNet Physicsjeravi84No ratings yet
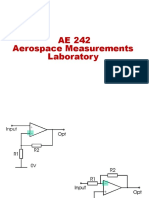
- AE 242 Aerospace Measurements LaboratoryDocument23 pagesAE 242 Aerospace Measurements LaboratoryAnubhavNo ratings yet
- AE 242 Aerospace Measurements LaboratoryDocument41 pagesAE 242 Aerospace Measurements LaboratoryAnubhavNo ratings yet
- Op-Amps: and Why They Are Useful To UsDocument32 pagesOp-Amps: and Why They Are Useful To UsUmaNo ratings yet
- Op AmplifierDocument40 pagesOp AmplifierMohammed Dyhia AliNo ratings yet
- Operational Amplifiers: Building Blocks of ServosDocument12 pagesOperational Amplifiers: Building Blocks of ServosArvind SinghNo ratings yet
- Introduction To Op-Amp PDFDocument23 pagesIntroduction To Op-Amp PDFJeswant TSNo ratings yet
- Operational Amplifiers: or Op Amps For ShortDocument31 pagesOperational Amplifiers: or Op Amps For ShortMurali krishnan.MNo ratings yet
- Op Amp Electronics Lab ReportDocument4 pagesOp Amp Electronics Lab ReportBushra MamoudNo ratings yet
- Operational Amplifier: Shubha Gokhale School of Sciences, IGNOUDocument35 pagesOperational Amplifier: Shubha Gokhale School of Sciences, IGNOUKRISHNAVINODNo ratings yet
- Feedback Amplifiers-EDC PDFDocument45 pagesFeedback Amplifiers-EDC PDFanjanaNo ratings yet
- Operational Amplifiers: Chapter-1Document45 pagesOperational Amplifiers: Chapter-1meseret sisayNo ratings yet
- Operational AmplifiersDocument33 pagesOperational AmplifiersMichael de VeraNo ratings yet
- Operational Amplifiers and ApplicationsDocument47 pagesOperational Amplifiers and Applicationsilias ahmedNo ratings yet
- Electronic Instrumentation: Experiment 4Document63 pagesElectronic Instrumentation: Experiment 4helenarajNo ratings yet
- CH-4 Signal Conditioning and Conversion1Document31 pagesCH-4 Signal Conditioning and Conversion1dagimawgchew777No ratings yet
- CH 2 - Op-Amp ApplicationDocument52 pagesCH 2 - Op-Amp Applicationknighthood4all100% (3)
- Bioelex Pr2Document25 pagesBioelex Pr2Eagle CoolNo ratings yet
- EMT 359/3 Analog Electronic II: Op-Amp Applications & Frequency ResponseDocument59 pagesEMT 359/3 Analog Electronic II: Op-Amp Applications & Frequency ResponsedharanikaNo ratings yet
- EMT 212/4 Analog Electronic II: Op-Amp Applications & Frequency ResponseDocument52 pagesEMT 212/4 Analog Electronic II: Op-Amp Applications & Frequency ResponseDr. Milton RichardsonNo ratings yet
- Ch7 Operational Amplifiers and Op Amp CircuitsDocument92 pagesCh7 Operational Amplifiers and Op Amp CircuitsBagus dwiNo ratings yet
- 2 - 1 Operational AmpliferDocument5 pages2 - 1 Operational AmpliferSepatugeceah35 GeceAhNo ratings yet
- OPAMPDocument24 pagesOPAMPEr Akhilesh SinghNo ratings yet
- 1 1 Analogue ControllersDocument36 pages1 1 Analogue ControllersFaissalNo ratings yet
- BME - 182 - Ch03 - Amplifiers and Signal ProcessingDocument75 pagesBME - 182 - Ch03 - Amplifiers and Signal ProcessingUy đzNo ratings yet
- Operational AmplifiersDocument37 pagesOperational Amplifiersearl pannilaNo ratings yet
- Unit 5Document35 pagesUnit 5saicharankoppolu272No ratings yet
- Analog & Digital Electronics: Course No: PH-218 Lec-23: Operational AmplifiersDocument14 pagesAnalog & Digital Electronics: Course No: PH-218 Lec-23: Operational AmplifiersAli Hasan SifatNo ratings yet
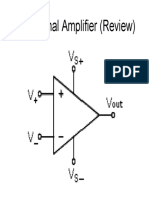
- Operational Amplifier (Review)Document16 pagesOperational Amplifier (Review)Matheus FelicioNo ratings yet
- Analog Electronics: D-211 E-Mail: WebDocument12 pagesAnalog Electronics: D-211 E-Mail: WebMurat YanazNo ratings yet
- OpampDocument51 pagesOpampMitesh BhagoraNo ratings yet
- OPAMP NonlinearAppDocument45 pagesOPAMP NonlinearAppkajari chattopadhyayNo ratings yet
- Operational Amplifier (OP-AMP) : If The Signal Applied To The Input Terminal, Results in OppositeDocument9 pagesOperational Amplifier (OP-AMP) : If The Signal Applied To The Input Terminal, Results in OppositeFiroj AnsariNo ratings yet
- 03 Analog Electronics-IIDocument63 pages03 Analog Electronics-IINazmus SakibNo ratings yet
- Operational Amplifier: Ankita Sharma BE4 Sem Ec Shree Balaji Institute of Tecnology &menegmentDocument20 pagesOperational Amplifier: Ankita Sharma BE4 Sem Ec Shree Balaji Institute of Tecnology &menegmentsunnybzu3No ratings yet
- Operational AmplifiersDocument34 pagesOperational AmplifiersLEARNING CENTER100% (1)
- L2 - Operational AmplifiersDocument22 pagesL2 - Operational AmplifiersHanan ShayiboNo ratings yet
- OpAmp CircuitsDocument25 pagesOpAmp Circuitsrachit guptaNo ratings yet
- Electronic Devices & Circuits: Lecture No 02Document40 pagesElectronic Devices & Circuits: Lecture No 02Abdullah ShahNo ratings yet
- Introduction To AmplifiersDocument25 pagesIntroduction To Amplifiersrahul prasadNo ratings yet
- Texas Instrumetn TI Electrical Characteristics in An Op Amp DSDocument78 pagesTexas Instrumetn TI Electrical Characteristics in An Op Amp DSAlex Valdes VargasNo ratings yet
- SESM3030 - 03 AmplifiersDocument17 pagesSESM3030 - 03 Amplifiersjiales225No ratings yet
- Op Amp 2Document26 pagesOp Amp 2krishNo ratings yet
- Ideal Op-Amps and Basic Circuits (Autosaved)Document49 pagesIdeal Op-Amps and Basic Circuits (Autosaved)Stephanus AbednegoNo ratings yet
- Operational Amplifier and Its Applications: Unit 5Document20 pagesOperational Amplifier and Its Applications: Unit 5Chiraag ChiruNo ratings yet
- Engr260 Lec5 Op Amps (Ink)Document30 pagesEngr260 Lec5 Op Amps (Ink)Nick RentschNo ratings yet
- Or Op Amps For Short: by Mohammed Imran, Assistant Professor, EED, MJCETDocument16 pagesOr Op Amps For Short: by Mohammed Imran, Assistant Professor, EED, MJCETjainamshahNo ratings yet
- Instrumentation AmplifiersDocument28 pagesInstrumentation AmplifiersKimNo ratings yet
- Instrumentation Amplifiers: Passive Transducer Measurement ConfigurationDocument28 pagesInstrumentation Amplifiers: Passive Transducer Measurement ConfigurationAbdi ExplainsNo ratings yet
- Pe Lab ExperimentsDocument6 pagesPe Lab Experimentsramesh tNo ratings yet
- United States Patent (10) Patent No.: US 8,520,412 B2Document25 pagesUnited States Patent (10) Patent No.: US 8,520,412 B2david19775891No ratings yet
- IC555 Tutorial AvinashJainDocument4 pagesIC555 Tutorial AvinashJainAvinash Jain100% (1)
- MA26 Meter & MP-T1 Pulser: Document Ref 903158-001 Rev - 1 10/2001Document28 pagesMA26 Meter & MP-T1 Pulser: Document Ref 903158-001 Rev - 1 10/2001michael KetselaNo ratings yet
- Transducer FundamentalsDocument100 pagesTransducer FundamentalsShy ArcangelNo ratings yet
- Design With Operational Amplifiers and Analog Integrated Circuits - S. Franco PDFDocument305 pagesDesign With Operational Amplifiers and Analog Integrated Circuits - S. Franco PDFMichel ArenivarNo ratings yet
- R20ut2711ej0100 Aprl78Document326 pagesR20ut2711ej0100 Aprl78bkzzNo ratings yet
- Ell100 ProjectDocument8 pagesEll100 ProjectGopika AroraNo ratings yet
- Solar Tracker:: B-Term ReportDocument48 pagesSolar Tracker:: B-Term ReportTanviNo ratings yet
- Design and Construction of A Remote Controlled Power Supply UnitDocument10 pagesDesign and Construction of A Remote Controlled Power Supply UnitIlija RistovskiNo ratings yet
- CQ0765RT-Fairchild Semiconductor PDFDocument24 pagesCQ0765RT-Fairchild Semiconductor PDFJorge Luis CabreraNo ratings yet
- PM6303A Serive ManualDocument51 pagesPM6303A Serive ManualShuttle FireNo ratings yet
- ESP8266 NodeMCUDocument3 pagesESP8266 NodeMCUMegha ProjectsNo ratings yet
- A3953 Datasheet PDFDocument12 pagesA3953 Datasheet PDFfelres87No ratings yet
- Laboratory Report Cover SheetDocument15 pagesLaboratory Report Cover SheetPreet PatelNo ratings yet
- Study and Performance Analysis of Digital Overcurrent Relay Based On Matlab/SimulinkDocument7 pagesStudy and Performance Analysis of Digital Overcurrent Relay Based On Matlab/Simulinkmistervarun1412No ratings yet
- A 3953 SBDocument14 pagesA 3953 SBAndres Uribe100% (1)
- Smart Helmet For Alcohol Detection & Accident Avoidance: School of Mechanical EngineeringDocument19 pagesSmart Helmet For Alcohol Detection & Accident Avoidance: School of Mechanical Engineeringdhaya nidhiNo ratings yet
- Description Features: Ltc4100 Smart Battery Charger ControllerDocument30 pagesDescription Features: Ltc4100 Smart Battery Charger ControllerAlexander VargasNo ratings yet
- TEA2018A: Current Mode Switching Power Supply Control CircuitDocument8 pagesTEA2018A: Current Mode Switching Power Supply Control CircuitJean Carlos RamosNo ratings yet
- Exp.2 - Comparator CKTDocument6 pagesExp.2 - Comparator CKTRuth DVNo ratings yet
- A Beam-Forming Transmit ASIC For Driving Ultrasonic Arrays: John V. Hat®eld, Kwet Seng ChaiDocument7 pagesA Beam-Forming Transmit ASIC For Driving Ultrasonic Arrays: John V. Hat®eld, Kwet Seng ChaitoloiceNo ratings yet
- AX8052F143Document61 pagesAX8052F143Andrew RoeschNo ratings yet
- z184 Zen v2 Support Software Operation Manual en PDFDocument94 pagesz184 Zen v2 Support Software Operation Manual en PDFjohandemNo ratings yet
- Bd9876aefj RohmDocument26 pagesBd9876aefj RohmBu AsNo ratings yet
- Cook Book Amplifiers PDFDocument278 pagesCook Book Amplifiers PDFJose Luis Valdueza100% (1)
- Arist0craft MAV500 Service ManualDocument344 pagesArist0craft MAV500 Service ManualtoungeinyaNo ratings yet
- LTC 7138Document24 pagesLTC 7138MallickarjunaNo ratings yet
- Up Decade Counter ProjectDocument17 pagesUp Decade Counter ProjectOhaneje UzomaNo ratings yet