
Microprocessor LEB 40503: By: Mrs Shareen Adlina Binti Shamsuddin
Microprocessor LEB 40503: By: Mrs Shareen Adlina Binti Shamsuddin
You might also like
- Updated List of Non-Programmable CalculatorsDocument3 pagesUpdated List of Non-Programmable CalculatorsJenica Deguzman100% (1)
- Computer Systems Assignment-1Document3 pagesComputer Systems Assignment-1ImranNo ratings yet
- Chapter 1 Microcomputer System - Peripheral DesignDocument70 pagesChapter 1 Microcomputer System - Peripheral DesignJevithaNo ratings yet
- Cpu & It'S Components: Icitss (It) Programme of IcaiDocument43 pagesCpu & It'S Components: Icitss (It) Programme of IcaigaganNo ratings yet
- Introduction Microcontrollers 08Document71 pagesIntroduction Microcontrollers 08Proff Moffat JamesNo ratings yet
- Mpi Unit 1Document27 pagesMpi Unit 1godhanipriyank8No ratings yet
- Embedded System NotesDocument66 pagesEmbedded System NotesChetnaNo ratings yet
- Chapter 1 (Assembly)Document32 pagesChapter 1 (Assembly)haroonhaniNo ratings yet
- Introduction To Computing:: Computer SystemsDocument27 pagesIntroduction To Computing:: Computer SystemsPhan Giang ChâuNo ratings yet
- Computer Architecture: Ancy Jerald I ST MSC, 2 Sem Dept of Physics ST Xavier'S College ThumbaDocument40 pagesComputer Architecture: Ancy Jerald I ST MSC, 2 Sem Dept of Physics ST Xavier'S College ThumbaFredy F RNo ratings yet
- Chapter1 DEK3133Document67 pagesChapter1 DEK3133dgkanade72No ratings yet
- Lecture 1 - Introduction-To-Microprocessor - Microcontroller PDFDocument16 pagesLecture 1 - Introduction-To-Microprocessor - Microcontroller PDFAnadiKashyapNo ratings yet
- I I M (D - D N) : Ntroduction of Ntroduction of Microprocessor and Icrocontroller R Alia AndiDocument16 pagesI I M (D - D N) : Ntroduction of Ntroduction of Microprocessor and Icrocontroller R Alia AndiHarsh KumarNo ratings yet
- CENG 365 Microprocessor UENR Unit 1Document65 pagesCENG 365 Microprocessor UENR Unit 1Blessing CheremehNo ratings yet
- Dlca NOTESDocument5 pagesDlca NOTESFatima HaroonNo ratings yet
- Introduction To The 68Hc12 MicrocontrollerDocument28 pagesIntroduction To The 68Hc12 Microcontrollerahetdhaezh100% (2)
- Chapter 1-v3 ARM - 3Document35 pagesChapter 1-v3 ARM - 3Weehao SiowNo ratings yet
- The Central Processing Unit and Memory By. Shafiq Ahmed Chachar 1Document49 pagesThe Central Processing Unit and Memory By. Shafiq Ahmed Chachar 1Syed HamdanNo ratings yet
- HardwareDocument4 pagesHardwaresumudujayakody1981No ratings yet
- Unit Ii PDFDocument90 pagesUnit Ii PDFSelva BabuNo ratings yet
- Chapter 2 - Hardware Architecture and InterfacingDocument24 pagesChapter 2 - Hardware Architecture and InterfacingroshanNo ratings yet
- Presentation 1Document33 pagesPresentation 1Fredy F RNo ratings yet
- Operating Systems System Administration: U. U. Samantha RajapakshaDocument32 pagesOperating Systems System Administration: U. U. Samantha RajapakshaDivaNo ratings yet
- Session 2Document26 pagesSession 2Hiển ĐoànNo ratings yet
- EmbededsystemDocument31 pagesEmbededsystemsonalNo ratings yet
- Microcontroller NotesDocument85 pagesMicrocontroller NotesJeevith Jeevi100% (1)
- Organization: Author: Pham Ngoc Ha - FU HL-SE Date: Aug-2021Document26 pagesOrganization: Author: Pham Ngoc Ha - FU HL-SE Date: Aug-2021Bảo Trần GiaNo ratings yet
- Session 2Document25 pagesSession 2Le Xuan Hao (K17 HL)No ratings yet
- OS UNIT1 SylajaDocument67 pagesOS UNIT1 SylajaHARINo ratings yet
- Lecture-1 (Introduction, Hardwired Logic) : MPI Unit 1Document34 pagesLecture-1 (Introduction, Hardwired Logic) : MPI Unit 1Tushar VermaNo ratings yet
- Com Data ProcessingDocument27 pagesCom Data ProcessingHamza KhanNo ratings yet
- Architecture Part 2Document3 pagesArchitecture Part 2araik.gevorgyan.20021907No ratings yet
- Introduction To Microcontrollers: ECE473/573 Microprocessor System Design, Dr. Shiue 1Document14 pagesIntroduction To Microcontrollers: ECE473/573 Microprocessor System Design, Dr. Shiue 1zaheer_ahamed2000No ratings yet
- CPE23L - ReviewerDocument11 pagesCPE23L - ReviewerLyka Marie DimayugaNo ratings yet
- The Components in The System Unit, Chapter 3Document94 pagesThe Components in The System Unit, Chapter 3Villamor NiezNo ratings yet
- Microprocessor: Mbeya University of Science and Technology Department of Electronics and Telecommunication EngineeringDocument30 pagesMicroprocessor: Mbeya University of Science and Technology Department of Electronics and Telecommunication EngineeringEM NemiNo ratings yet
- BFM3333 Course: Microcontroller SystemDocument33 pagesBFM3333 Course: Microcontroller SystemMostafa AbdulmalekNo ratings yet
- Micro-Controller: Emergers TechnologiesDocument21 pagesMicro-Controller: Emergers Technologiesprajun_kumar3No ratings yet
- Introduction To Peripherals InterfacingDocument23 pagesIntroduction To Peripherals Interfacingabu sayedNo ratings yet
- Giao Trinh He Thong Nhung - VDK H8Document193 pagesGiao Trinh He Thong Nhung - VDK H8gaikieuucNo ratings yet
- Embedded (Practical)Document18 pagesEmbedded (Practical)Devika KachhawahaNo ratings yet
- Day 1Document19 pagesDay 1Joshua Kofi AddoNo ratings yet
- Embedded SystemsDocument28 pagesEmbedded SystemsCheril Mehta0% (1)
- Lec 1 Introduction To MiocroprocessorDocument21 pagesLec 1 Introduction To Miocroprocessor21201151No ratings yet
- 10.define Embedded SystemsDocument4 pages10.define Embedded Systems20EUMT047 NARENDRAN M SNo ratings yet
- Lecture2 - EmbeddedDocument20 pagesLecture2 - EmbeddedBlack HunterNo ratings yet
- 03 01-Hardware CpuDocument16 pages03 01-Hardware CpuDASH GROUPNo ratings yet
- Introduction To Motorola 68HC11: 1.1 ObjectivesDocument36 pagesIntroduction To Motorola 68HC11: 1.1 ObjectivesRaoul ToludNo ratings yet
- Introduction To Micro-Processors & Micro-ControllersDocument62 pagesIntroduction To Micro-Processors & Micro-ControllersNazmus SakibNo ratings yet
- Lec 06-07 Computer Hardware, System Unit Its Parts.Document59 pagesLec 06-07 Computer Hardware, System Unit Its Parts.Muzammil KhanNo ratings yet
- MICROPROCESSOR DESIGNING by UPKARDocument42 pagesMICROPROCESSOR DESIGNING by UPKARUpkar ChauhanNo ratings yet
- Notes For Chapter 3Document24 pagesNotes For Chapter 3Nicki GNo ratings yet
- CAG216D - Slides - 01 Microcomputer Systems 13sDocument12 pagesCAG216D - Slides - 01 Microcomputer Systems 13sBee Jon CeeNo ratings yet
- Intro To MPDocument22 pagesIntro To MP211902020No ratings yet
- CS111-PART 3 - Computer Hardware UnitDocument39 pagesCS111-PART 3 - Computer Hardware UnitJian KusanagiNo ratings yet
- The Computer System: Function & InterconnectionsDocument46 pagesThe Computer System: Function & Interconnectionsjulius opolotNo ratings yet
- Report On Chapter 4 Bus-Based Computer SystemsDocument2 pagesReport On Chapter 4 Bus-Based Computer SystemsHossam FadeelNo ratings yet
- System UnitDocument95 pagesSystem UnitAdnan AliNo ratings yet
- Examples of Processors With The RISC Architecture Include MIPSDocument4 pagesExamples of Processors With The RISC Architecture Include MIPSashu anyaNo ratings yet
- What Is A Microprocessor?: Introduction To PICDocument20 pagesWhat Is A Microprocessor?: Introduction To PICNEETHU PRAKASHNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- 271223-RAYA-BA Kerusakan Battery Navigasi. EmergencyDocument1 page271223-RAYA-BA Kerusakan Battery Navigasi. EmergencyFauzan AriqNo ratings yet
- Electrician - CV Bayu Kresna PUDocument19 pagesElectrician - CV Bayu Kresna PUFauzan AriqNo ratings yet
- CV Antoni L BontingDocument1 pageCV Antoni L BontingFauzan AriqNo ratings yet
- Meger PL3Document1 pageMeger PL3Fauzan AriqNo ratings yet
- Project Planning and Management LGB 30802: Norfadhlina Khalid Unikl - MimetDocument23 pagesProject Planning and Management LGB 30802: Norfadhlina Khalid Unikl - MimetFauzan AriqNo ratings yet
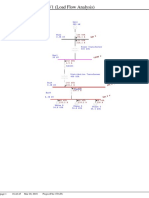
- One-Line Diagram - OLV1 (Load Flow Analysis) : 155 kVA 236.1 A 155 kVA 236.1 A 155 kVA 236.1 A 155 kVA 236.1 ADocument1 pageOne-Line Diagram - OLV1 (Load Flow Analysis) : 155 kVA 236.1 A 155 kVA 236.1 A 155 kVA 236.1 A 155 kVA 236.1 AFauzan AriqNo ratings yet
- TUTORIAL2CDocument2 pagesTUTORIAL2CFauzan AriqNo ratings yet
- Chapter 3Document28 pagesChapter 3Fauzan AriqNo ratings yet
- 1131 Mohdyazidbinkamis2006Document141 pages1131 Mohdyazidbinkamis2006Fauzan AriqNo ratings yet
- E. Post - Questions. Non-Load Experiment of The DC Shunt GeneratorDocument3 pagesE. Post - Questions. Non-Load Experiment of The DC Shunt GeneratorFauzan AriqNo ratings yet
- Ime44870f2 TZTL12F 15F PDFDocument79 pagesIme44870f2 TZTL12F 15F PDFFauzan AriqNo ratings yet
- Lab4 - Seven Segment DisplayDocument3 pagesLab4 - Seven Segment DisplayFauzan AriqNo ratings yet
- Lab1 MicropDocument11 pagesLab1 MicropFauzan AriqNo ratings yet
- Assignment 1 Domestic Tariff: Microprocessor (LEB40503)Document1 pageAssignment 1 Domestic Tariff: Microprocessor (LEB40503)Fauzan AriqNo ratings yet
- IO-Device PROFINET Functions TIAPortal enDocument8 pagesIO-Device PROFINET Functions TIAPortal enStefan ĐordanNo ratings yet
- 5 PLConlineDocument45 pages5 PLConlineLloyd MontemayorNo ratings yet
- Latihan Uas 2020 105Document4 pagesLatihan Uas 2020 105Pramitha Hanny QueencelineNo ratings yet
- Microprocessor & Its ApplicationsDocument15 pagesMicroprocessor & Its ApplicationsSwamy Venkata UdayagiriNo ratings yet
- Os Question BankDocument3 pagesOs Question Bankmeghal prajapatiNo ratings yet
- Ec 2203 Digital ElectronicsDocument1 pageEc 2203 Digital ElectronicsMaheswaran UmaiyorupaganNo ratings yet
- HP Manual PDFDocument1,616 pagesHP Manual PDFJoe BlackNo ratings yet
- HP Commercial January 2021 Pricelist Version 2.0Document69 pagesHP Commercial January 2021 Pricelist Version 2.0Vinodh MNo ratings yet
- Coc 1 ExamDocument7 pagesCoc 1 ExamJelo BioNo ratings yet
- Print PC - PC Builder - Star TechDocument2 pagesPrint PC - PC Builder - Star TechZadid Ahsan KhanNo ratings yet
- By Akash Gaur: Training Report On Pic MicrocontrollerDocument34 pagesBy Akash Gaur: Training Report On Pic MicrocontrollerAkash GaurNo ratings yet
- Bengal: User ManualDocument55 pagesBengal: User ManualHermanos LozadaNo ratings yet
- Unit3 AVR Microcontroller IntroductionDocument120 pagesUnit3 AVR Microcontroller IntroductionBreeje AnadkatNo ratings yet
- Module II: History of Electronics: Unit 1: Pre-Mechanical Age (3000 B.C. - 1450 A.D.)Document6 pagesModule II: History of Electronics: Unit 1: Pre-Mechanical Age (3000 B.C. - 1450 A.D.)Jenny PillocNo ratings yet
- CSS NC Ii Accomplishment Chart For ReportingDocument6 pagesCSS NC Ii Accomplishment Chart For ReportingKaJong JaclaNo ratings yet
- Product Information Features:: Patriot P300 M.2 Pcie Gen 3 X4 1Tb SSD - U.S VersionDocument1 pageProduct Information Features:: Patriot P300 M.2 Pcie Gen 3 X4 1Tb SSD - U.S VersionRAW BGNo ratings yet
- OS ServicesDocument6 pagesOS ServicesAnil KumarNo ratings yet
- Linkers and LoadersDocument34 pagesLinkers and Loaderssaiprojectwork100% (2)
- Internship Report Arvie 11-10-2023Document16 pagesInternship Report Arvie 11-10-2023arvieizzaaaNo ratings yet
- SMT ConsumableDocument20 pagesSMT ConsumableLam HoangNo ratings yet
- Introduction To Computer: Department of Computer & Software Technology by Kiramat RahmanDocument16 pagesIntroduction To Computer: Department of Computer & Software Technology by Kiramat RahmandangermanNo ratings yet
- Computer FundamentalsDocument14 pagesComputer FundamentalsRao SrinivasNo ratings yet
- Gigabyte GA-Z77MX-D3H MotherboardDocument43 pagesGigabyte GA-Z77MX-D3H MotherboardGIGABYTE UKNo ratings yet
- Gigabyte Motherboard GA-B250M-D2V User's ManualDocument39 pagesGigabyte Motherboard GA-B250M-D2V User's ManualVinayNo ratings yet
- (HOW-TO) Install Android x86 On Any PCs - La - Android Development and Hacking - XDA ForumsDocument9 pages(HOW-TO) Install Android x86 On Any PCs - La - Android Development and Hacking - XDA ForumsSanjay YadavNo ratings yet
- PC Worth Price ListDocument9 pagesPC Worth Price ListJoenard SarmientoNo ratings yet
- 1ST QTR Summative Test - Tle9-IctDocument2 pages1ST QTR Summative Test - Tle9-IctPreciosa LarionNo ratings yet
- Preview Sementara Simulasi Rakitan EnterkomputerDocument1 pagePreview Sementara Simulasi Rakitan Enterkomputeranon_199433612No ratings yet




































































































Download as ppt, pdf, or txt
You might also like
- Updated List of Non-Programmable CalculatorsDocument3 pagesUpdated List of Non-Programmable CalculatorsJenica Deguzman100% (1)
- Computer Systems Assignment-1Document3 pagesComputer Systems Assignment-1ImranNo ratings yet
- Chapter 1 Microcomputer System - Peripheral DesignDocument70 pagesChapter 1 Microcomputer System - Peripheral DesignJevithaNo ratings yet
- Cpu & It'S Components: Icitss (It) Programme of IcaiDocument43 pagesCpu & It'S Components: Icitss (It) Programme of IcaigaganNo ratings yet
- Introduction Microcontrollers 08Document71 pagesIntroduction Microcontrollers 08Proff Moffat JamesNo ratings yet
- Mpi Unit 1Document27 pagesMpi Unit 1godhanipriyank8No ratings yet
- Embedded System NotesDocument66 pagesEmbedded System NotesChetnaNo ratings yet
- Chapter 1 (Assembly)Document32 pagesChapter 1 (Assembly)haroonhaniNo ratings yet
- Introduction To Computing:: Computer SystemsDocument27 pagesIntroduction To Computing:: Computer SystemsPhan Giang ChâuNo ratings yet
- Computer Architecture: Ancy Jerald I ST MSC, 2 Sem Dept of Physics ST Xavier'S College ThumbaDocument40 pagesComputer Architecture: Ancy Jerald I ST MSC, 2 Sem Dept of Physics ST Xavier'S College ThumbaFredy F RNo ratings yet
- Chapter1 DEK3133Document67 pagesChapter1 DEK3133dgkanade72No ratings yet
- Lecture 1 - Introduction-To-Microprocessor - Microcontroller PDFDocument16 pagesLecture 1 - Introduction-To-Microprocessor - Microcontroller PDFAnadiKashyapNo ratings yet
- I I M (D - D N) : Ntroduction of Ntroduction of Microprocessor and Icrocontroller R Alia AndiDocument16 pagesI I M (D - D N) : Ntroduction of Ntroduction of Microprocessor and Icrocontroller R Alia AndiHarsh KumarNo ratings yet
- CENG 365 Microprocessor UENR Unit 1Document65 pagesCENG 365 Microprocessor UENR Unit 1Blessing CheremehNo ratings yet
- Dlca NOTESDocument5 pagesDlca NOTESFatima HaroonNo ratings yet
- Introduction To The 68Hc12 MicrocontrollerDocument28 pagesIntroduction To The 68Hc12 Microcontrollerahetdhaezh100% (2)
- Chapter 1-v3 ARM - 3Document35 pagesChapter 1-v3 ARM - 3Weehao SiowNo ratings yet
- The Central Processing Unit and Memory By. Shafiq Ahmed Chachar 1Document49 pagesThe Central Processing Unit and Memory By. Shafiq Ahmed Chachar 1Syed HamdanNo ratings yet
- HardwareDocument4 pagesHardwaresumudujayakody1981No ratings yet
- Unit Ii PDFDocument90 pagesUnit Ii PDFSelva BabuNo ratings yet
- Chapter 2 - Hardware Architecture and InterfacingDocument24 pagesChapter 2 - Hardware Architecture and InterfacingroshanNo ratings yet
- Presentation 1Document33 pagesPresentation 1Fredy F RNo ratings yet
- Operating Systems System Administration: U. U. Samantha RajapakshaDocument32 pagesOperating Systems System Administration: U. U. Samantha RajapakshaDivaNo ratings yet
- Session 2Document26 pagesSession 2Hiển ĐoànNo ratings yet
- EmbededsystemDocument31 pagesEmbededsystemsonalNo ratings yet
- Microcontroller NotesDocument85 pagesMicrocontroller NotesJeevith Jeevi100% (1)
- Organization: Author: Pham Ngoc Ha - FU HL-SE Date: Aug-2021Document26 pagesOrganization: Author: Pham Ngoc Ha - FU HL-SE Date: Aug-2021Bảo Trần GiaNo ratings yet
- Session 2Document25 pagesSession 2Le Xuan Hao (K17 HL)No ratings yet
- OS UNIT1 SylajaDocument67 pagesOS UNIT1 SylajaHARINo ratings yet
- Lecture-1 (Introduction, Hardwired Logic) : MPI Unit 1Document34 pagesLecture-1 (Introduction, Hardwired Logic) : MPI Unit 1Tushar VermaNo ratings yet
- Com Data ProcessingDocument27 pagesCom Data ProcessingHamza KhanNo ratings yet
- Architecture Part 2Document3 pagesArchitecture Part 2araik.gevorgyan.20021907No ratings yet
- Introduction To Microcontrollers: ECE473/573 Microprocessor System Design, Dr. Shiue 1Document14 pagesIntroduction To Microcontrollers: ECE473/573 Microprocessor System Design, Dr. Shiue 1zaheer_ahamed2000No ratings yet
- CPE23L - ReviewerDocument11 pagesCPE23L - ReviewerLyka Marie DimayugaNo ratings yet
- The Components in The System Unit, Chapter 3Document94 pagesThe Components in The System Unit, Chapter 3Villamor NiezNo ratings yet
- Microprocessor: Mbeya University of Science and Technology Department of Electronics and Telecommunication EngineeringDocument30 pagesMicroprocessor: Mbeya University of Science and Technology Department of Electronics and Telecommunication EngineeringEM NemiNo ratings yet
- BFM3333 Course: Microcontroller SystemDocument33 pagesBFM3333 Course: Microcontroller SystemMostafa AbdulmalekNo ratings yet
- Micro-Controller: Emergers TechnologiesDocument21 pagesMicro-Controller: Emergers Technologiesprajun_kumar3No ratings yet
- Introduction To Peripherals InterfacingDocument23 pagesIntroduction To Peripherals Interfacingabu sayedNo ratings yet
- Giao Trinh He Thong Nhung - VDK H8Document193 pagesGiao Trinh He Thong Nhung - VDK H8gaikieuucNo ratings yet
- Embedded (Practical)Document18 pagesEmbedded (Practical)Devika KachhawahaNo ratings yet
- Day 1Document19 pagesDay 1Joshua Kofi AddoNo ratings yet
- Embedded SystemsDocument28 pagesEmbedded SystemsCheril Mehta0% (1)
- Lec 1 Introduction To MiocroprocessorDocument21 pagesLec 1 Introduction To Miocroprocessor21201151No ratings yet
- 10.define Embedded SystemsDocument4 pages10.define Embedded Systems20EUMT047 NARENDRAN M SNo ratings yet
- Lecture2 - EmbeddedDocument20 pagesLecture2 - EmbeddedBlack HunterNo ratings yet
- 03 01-Hardware CpuDocument16 pages03 01-Hardware CpuDASH GROUPNo ratings yet
- Introduction To Motorola 68HC11: 1.1 ObjectivesDocument36 pagesIntroduction To Motorola 68HC11: 1.1 ObjectivesRaoul ToludNo ratings yet
- Introduction To Micro-Processors & Micro-ControllersDocument62 pagesIntroduction To Micro-Processors & Micro-ControllersNazmus SakibNo ratings yet
- Lec 06-07 Computer Hardware, System Unit Its Parts.Document59 pagesLec 06-07 Computer Hardware, System Unit Its Parts.Muzammil KhanNo ratings yet
- MICROPROCESSOR DESIGNING by UPKARDocument42 pagesMICROPROCESSOR DESIGNING by UPKARUpkar ChauhanNo ratings yet
- Notes For Chapter 3Document24 pagesNotes For Chapter 3Nicki GNo ratings yet
- CAG216D - Slides - 01 Microcomputer Systems 13sDocument12 pagesCAG216D - Slides - 01 Microcomputer Systems 13sBee Jon CeeNo ratings yet
- Intro To MPDocument22 pagesIntro To MP211902020No ratings yet
- CS111-PART 3 - Computer Hardware UnitDocument39 pagesCS111-PART 3 - Computer Hardware UnitJian KusanagiNo ratings yet
- The Computer System: Function & InterconnectionsDocument46 pagesThe Computer System: Function & Interconnectionsjulius opolotNo ratings yet
- Report On Chapter 4 Bus-Based Computer SystemsDocument2 pagesReport On Chapter 4 Bus-Based Computer SystemsHossam FadeelNo ratings yet
- System UnitDocument95 pagesSystem UnitAdnan AliNo ratings yet
- Examples of Processors With The RISC Architecture Include MIPSDocument4 pagesExamples of Processors With The RISC Architecture Include MIPSashu anyaNo ratings yet
- What Is A Microprocessor?: Introduction To PICDocument20 pagesWhat Is A Microprocessor?: Introduction To PICNEETHU PRAKASHNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- 271223-RAYA-BA Kerusakan Battery Navigasi. EmergencyDocument1 page271223-RAYA-BA Kerusakan Battery Navigasi. EmergencyFauzan AriqNo ratings yet
- Electrician - CV Bayu Kresna PUDocument19 pagesElectrician - CV Bayu Kresna PUFauzan AriqNo ratings yet
- CV Antoni L BontingDocument1 pageCV Antoni L BontingFauzan AriqNo ratings yet
- Meger PL3Document1 pageMeger PL3Fauzan AriqNo ratings yet
- Project Planning and Management LGB 30802: Norfadhlina Khalid Unikl - MimetDocument23 pagesProject Planning and Management LGB 30802: Norfadhlina Khalid Unikl - MimetFauzan AriqNo ratings yet
- One-Line Diagram - OLV1 (Load Flow Analysis) : 155 kVA 236.1 A 155 kVA 236.1 A 155 kVA 236.1 A 155 kVA 236.1 ADocument1 pageOne-Line Diagram - OLV1 (Load Flow Analysis) : 155 kVA 236.1 A 155 kVA 236.1 A 155 kVA 236.1 A 155 kVA 236.1 AFauzan AriqNo ratings yet
- TUTORIAL2CDocument2 pagesTUTORIAL2CFauzan AriqNo ratings yet
- Chapter 3Document28 pagesChapter 3Fauzan AriqNo ratings yet
- 1131 Mohdyazidbinkamis2006Document141 pages1131 Mohdyazidbinkamis2006Fauzan AriqNo ratings yet
- E. Post - Questions. Non-Load Experiment of The DC Shunt GeneratorDocument3 pagesE. Post - Questions. Non-Load Experiment of The DC Shunt GeneratorFauzan AriqNo ratings yet
- Ime44870f2 TZTL12F 15F PDFDocument79 pagesIme44870f2 TZTL12F 15F PDFFauzan AriqNo ratings yet
- Lab4 - Seven Segment DisplayDocument3 pagesLab4 - Seven Segment DisplayFauzan AriqNo ratings yet
- Lab1 MicropDocument11 pagesLab1 MicropFauzan AriqNo ratings yet
- Assignment 1 Domestic Tariff: Microprocessor (LEB40503)Document1 pageAssignment 1 Domestic Tariff: Microprocessor (LEB40503)Fauzan AriqNo ratings yet
- IO-Device PROFINET Functions TIAPortal enDocument8 pagesIO-Device PROFINET Functions TIAPortal enStefan ĐordanNo ratings yet
- 5 PLConlineDocument45 pages5 PLConlineLloyd MontemayorNo ratings yet
- Latihan Uas 2020 105Document4 pagesLatihan Uas 2020 105Pramitha Hanny QueencelineNo ratings yet
- Microprocessor & Its ApplicationsDocument15 pagesMicroprocessor & Its ApplicationsSwamy Venkata UdayagiriNo ratings yet
- Os Question BankDocument3 pagesOs Question Bankmeghal prajapatiNo ratings yet
- Ec 2203 Digital ElectronicsDocument1 pageEc 2203 Digital ElectronicsMaheswaran UmaiyorupaganNo ratings yet
- HP Manual PDFDocument1,616 pagesHP Manual PDFJoe BlackNo ratings yet
- HP Commercial January 2021 Pricelist Version 2.0Document69 pagesHP Commercial January 2021 Pricelist Version 2.0Vinodh MNo ratings yet
- Coc 1 ExamDocument7 pagesCoc 1 ExamJelo BioNo ratings yet
- Print PC - PC Builder - Star TechDocument2 pagesPrint PC - PC Builder - Star TechZadid Ahsan KhanNo ratings yet
- By Akash Gaur: Training Report On Pic MicrocontrollerDocument34 pagesBy Akash Gaur: Training Report On Pic MicrocontrollerAkash GaurNo ratings yet
- Bengal: User ManualDocument55 pagesBengal: User ManualHermanos LozadaNo ratings yet
- Unit3 AVR Microcontroller IntroductionDocument120 pagesUnit3 AVR Microcontroller IntroductionBreeje AnadkatNo ratings yet
- Module II: History of Electronics: Unit 1: Pre-Mechanical Age (3000 B.C. - 1450 A.D.)Document6 pagesModule II: History of Electronics: Unit 1: Pre-Mechanical Age (3000 B.C. - 1450 A.D.)Jenny PillocNo ratings yet
- CSS NC Ii Accomplishment Chart For ReportingDocument6 pagesCSS NC Ii Accomplishment Chart For ReportingKaJong JaclaNo ratings yet
- Product Information Features:: Patriot P300 M.2 Pcie Gen 3 X4 1Tb SSD - U.S VersionDocument1 pageProduct Information Features:: Patriot P300 M.2 Pcie Gen 3 X4 1Tb SSD - U.S VersionRAW BGNo ratings yet
- OS ServicesDocument6 pagesOS ServicesAnil KumarNo ratings yet
- Linkers and LoadersDocument34 pagesLinkers and Loaderssaiprojectwork100% (2)
- Internship Report Arvie 11-10-2023Document16 pagesInternship Report Arvie 11-10-2023arvieizzaaaNo ratings yet
- SMT ConsumableDocument20 pagesSMT ConsumableLam HoangNo ratings yet
- Introduction To Computer: Department of Computer & Software Technology by Kiramat RahmanDocument16 pagesIntroduction To Computer: Department of Computer & Software Technology by Kiramat RahmandangermanNo ratings yet
- Computer FundamentalsDocument14 pagesComputer FundamentalsRao SrinivasNo ratings yet
- Gigabyte GA-Z77MX-D3H MotherboardDocument43 pagesGigabyte GA-Z77MX-D3H MotherboardGIGABYTE UKNo ratings yet
- Gigabyte Motherboard GA-B250M-D2V User's ManualDocument39 pagesGigabyte Motherboard GA-B250M-D2V User's ManualVinayNo ratings yet
- (HOW-TO) Install Android x86 On Any PCs - La - Android Development and Hacking - XDA ForumsDocument9 pages(HOW-TO) Install Android x86 On Any PCs - La - Android Development and Hacking - XDA ForumsSanjay YadavNo ratings yet
- PC Worth Price ListDocument9 pagesPC Worth Price ListJoenard SarmientoNo ratings yet
- 1ST QTR Summative Test - Tle9-IctDocument2 pages1ST QTR Summative Test - Tle9-IctPreciosa LarionNo ratings yet
- Preview Sementara Simulasi Rakitan EnterkomputerDocument1 pagePreview Sementara Simulasi Rakitan Enterkomputeranon_199433612No ratings yet