Download as pptx, pdf, or txt
You might also like
- Civil AM Practice ExamDocument21 pagesCivil AM Practice ExamLawrence Omai100% (2)
- Lecture 02Document24 pagesLecture 02amy.like.cooking.77No ratings yet
- Lec.3 ZtransformDocument25 pagesLec.3 ZtransformyfmihweasaNo ratings yet
- Example 1:: KKK K - Only Horizontal Displacements Are Allowed. Uu U K K K K F F Uu U in K FDocument16 pagesExample 1:: KKK K - Only Horizontal Displacements Are Allowed. Uu U K K K K F F Uu U in K FsinanaizadNo ratings yet
- Business MathematicsDocument4 pagesBusiness MathematicssampalukangaNo ratings yet
- Lect 10 - Full PDFDocument36 pagesLect 10 - Full PDFSaeed RehmanNo ratings yet
- Time: 60 Min - Give Answer To 2 Decimal Places, Where AppropriateDocument5 pagesTime: 60 Min - Give Answer To 2 Decimal Places, Where AppropriateSteven WANGNo ratings yet
- Midterm 1 2016 SolnDocument8 pagesMidterm 1 2016 SolnJulia CNo ratings yet
- Chapter 5 Lecture Slides Spring2017Document32 pagesChapter 5 Lecture Slides Spring2017HectistyleNo ratings yet
- Ductility of Concrete SectionsDocument15 pagesDuctility of Concrete SectionsnicholasomodingNo ratings yet
- Inno2018 Emt2502 Vibrations Undamped MdofDocument8 pagesInno2018 Emt2502 Vibrations Undamped MdofinnoodiraNo ratings yet
- MSCFM 1Document13 pagesMSCFM 1YadyeNo ratings yet
- Worksheet 5 Solution SN Curve Practice ProblemDocument2 pagesWorksheet 5 Solution SN Curve Practice ProblemWolf LordNo ratings yet
- Finite Element Method (FEM) Module Code:: Lecture On Direct Approach To 1D Problem, 15 September 2019Document20 pagesFinite Element Method (FEM) Module Code:: Lecture On Direct Approach To 1D Problem, 15 September 2019Mesay Alemu TolchaNo ratings yet
- Fem 2Document20 pagesFem 2tilahun yeshiyeNo ratings yet
- Faculty of TechnolgyDocument4 pagesFaculty of TechnolgykatendeallNo ratings yet
- Midterm 1 2019 SolnDocument8 pagesMidterm 1 2019 SolnJulia CNo ratings yet
- Mechanics of Materials IV:: Deflections, Buckling, Combined Loading, & Failure TheoriesDocument13 pagesMechanics of Materials IV:: Deflections, Buckling, Combined Loading, & Failure TheoriesFaryal BatoolNo ratings yet
- Electric Force & Electric Field IDocument60 pagesElectric Force & Electric Field IImran ParvezNo ratings yet
- AITS Part 4 P2 SolutionsDocument18 pagesAITS Part 4 P2 SolutionsArchit AgarwalNo ratings yet
- University of Maryland, College Park: Solution To FINAL EXAMDocument8 pagesUniversity of Maryland, College Park: Solution To FINAL EXAMArif ImamNo ratings yet
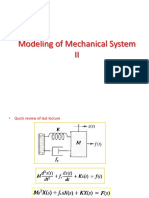
- Modeling of Mechanical System IIDocument11 pagesModeling of Mechanical System IIshrey saxenaNo ratings yet
- 6 - CE 511 - Base Plate Design PDFDocument33 pages6 - CE 511 - Base Plate Design PDFJayson RamosNo ratings yet
- Box-Cox Transformation: An OverviewDocument45 pagesBox-Cox Transformation: An OverviewmachuckNo ratings yet
- AITS 2324 PT I JEEM TD SolDocument20 pagesAITS 2324 PT I JEEM TD Solshouryaswami6No ratings yet
- 03 Lecture Note - Multicomponent Flash DistillationDocument7 pages03 Lecture Note - Multicomponent Flash DistillationMonkeyDLuffyNo ratings yet
- Macro 2 Chap 2Document78 pagesMacro 2 Chap 2ngant21401cNo ratings yet
- Finite Element Analysis: Level 6, Semester 1&2 2022-2023Document32 pagesFinite Element Analysis: Level 6, Semester 1&2 2022-2023Sara HaiderNo ratings yet
- 2022 JEE Main 4 SolutionDocument13 pages2022 JEE Main 4 SolutionADITYA RAJNo ratings yet
- Flutter Symposium 2011Document7 pagesFlutter Symposium 2011gandalf500No ratings yet
- Modal Enforced MotionDocument21 pagesModal Enforced MotiongundulpNo ratings yet
- Exchange Variation - AvrukhDocument10 pagesExchange Variation - AvrukhFran AriasNo ratings yet
- Aits-1920-Ft-Iii-Jeem - Sol PDFDocument12 pagesAits-1920-Ft-Iii-Jeem - Sol PDFSameer Goel100% (1)
- Chuong 7Document210 pagesChuong 7Đức TríNo ratings yet
- 11-11-2023 - JR - Iit - Star Co-Sc (Model-B) - Jee Adv - 2018 - P1 - Wat-27 - Key&solDocument12 pages11-11-2023 - JR - Iit - Star Co-Sc (Model-B) - Jee Adv - 2018 - P1 - Wat-27 - Key&solNAVODIT SNo ratings yet
- Direct Torque Control of Double Star Synchronous MachineDocument5 pagesDirect Torque Control of Double Star Synchronous MachineMohamed NabilNo ratings yet
- WBHS8J22015Document7 pagesWBHS8J22015Ndima KuneneNo ratings yet
- Moment Frame TheoryDocument9 pagesMoment Frame TheoryRiki AnggriawanNo ratings yet
- Cable ElementDocument4 pagesCable Elementmidastutorials2023No ratings yet
- University of Engineering & Technology, Peshawar, Pakistan: Free Vibration in Undamped M.D.O.F SystemsDocument53 pagesUniversity of Engineering & Technology, Peshawar, Pakistan: Free Vibration in Undamped M.D.O.F SystemsedgerNo ratings yet
- F 3243 B.A. Part II OldNew Course Mathematics I Advanced CalculusDocument3 pagesF 3243 B.A. Part II OldNew Course Mathematics I Advanced Calculusnavi09No ratings yet
- Exam1 PracticeDocument13 pagesExam1 PracticedrpNo ratings yet
- Temp-End PaperDocument2 pagesTemp-End PaperInzamam Ul HaqueNo ratings yet
- Growth and InvestmentDocument12 pagesGrowth and InvestmentAli HasnainNo ratings yet
- 6-Eccecntric FootingDocument21 pages6-Eccecntric FootingGrace GonzalesNo ratings yet
- CobbDocument5 pagesCobbYOMAYRA YULISA GOMEZ SUCARINo ratings yet
- Example Math QuestionDocument4 pagesExample Math QuestionlrybczynskiNo ratings yet
- Engineering Simulations and Analysis (M51Mae) Group PresentationDocument7 pagesEngineering Simulations and Analysis (M51Mae) Group PresentationZamri NasirNo ratings yet
- Module 7 Applications in Engineering MechanicsDocument10 pagesModule 7 Applications in Engineering MechanicsWolf LordNo ratings yet
- Section 6Document133 pagesSection 6ILAYAPERUMAL K100% (2)
- ColumnsDocument32 pagesColumnsPatricia GalorioNo ratings yet
- Bending Torsion PDFDocument25 pagesBending Torsion PDFEarl EsparesNo ratings yet
- School of Physics and Astronomy Third Year Example Class 2017/18 Semester 6 Examples 4: 40352Document3 pagesSchool of Physics and Astronomy Third Year Example Class 2017/18 Semester 6 Examples 4: 40352APSCNo ratings yet
- Aits 2223 FT Xi Jeea TD Paper 1 SolDocument17 pagesAits 2223 FT Xi Jeea TD Paper 1 SolSuvrajyoti TaraphdarNo ratings yet
- DCS AssignmentsDocument11 pagesDCS AssignmentsRavi TejaNo ratings yet
- Course Outcome: Register NumberDocument2 pagesCourse Outcome: Register NumberBalaji BaoukNo ratings yet
- MT-220 JEEM-SolDocument16 pagesMT-220 JEEM-SolPriyansh RastogiNo ratings yet
- AIITS HCT-4 JEE MAIN SOLUTIONnjjDocument24 pagesAIITS HCT-4 JEE MAIN SOLUTIONnjjTejus ManoharanNo ratings yet
- 2701 Advance MacroeconomicsDocument3 pages2701 Advance Macroeconomicsmeelas123No ratings yet
- Administrative Topics: CISE305: Linear Control SystemsDocument39 pagesAdministrative Topics: CISE305: Linear Control Systemsمحمد حمدNo ratings yet
- CISE414 - Unit 04 AVR Atmega PortsDocument30 pagesCISE414 - Unit 04 AVR Atmega Portsمحمد حمدNo ratings yet
- More Examples On Chapter 1Document13 pagesMore Examples On Chapter 1محمد حمدNo ratings yet
- CISE414 - Unit 01 IntroductionDocument50 pagesCISE414 - Unit 01 Introductionمحمد حمدNo ratings yet
- Unit-1 (Determinate and Indeterminate Structures)Document64 pagesUnit-1 (Determinate and Indeterminate Structures)Deepak Sah100% (1)
- How To Draw and Analyse Free Body Diagrams (FBDS) - Ilearn Engineering®Document20 pagesHow To Draw and Analyse Free Body Diagrams (FBDS) - Ilearn Engineering®wajju007No ratings yet
- Chapter 3 - Static of Rigid Bodies in Two DimensionsDocument55 pagesChapter 3 - Static of Rigid Bodies in Two DimensionsrushdiNo ratings yet
- Class 1Document43 pagesClass 1psyclonesesNo ratings yet
- Frames StaticsDocument7 pagesFrames Staticsomer1299No ratings yet
- EquilibriumDocument54 pagesEquilibriumHera Via Faith LaraquelNo ratings yet
- Chapter 3 - Equilibrium: Learning Outcomes For This ChapterDocument15 pagesChapter 3 - Equilibrium: Learning Outcomes For This ChapterLetshego Itumeleng MoahloliNo ratings yet
- The Laws of Motion ¿ ¿ Cengage LearningDocument57 pagesThe Laws of Motion ¿ ¿ Cengage LearningNguyễn Khắc HuyNo ratings yet
- Mechanics - Notes - Improved (1) - 1Document65 pagesMechanics - Notes - Improved (1) - 1MUSIBIRA PAULNo ratings yet
- Lec 03, Rectangular Components of ForceDocument21 pagesLec 03, Rectangular Components of ForceAli Raza100% (1)
- 2.2 Modeling Forces With Free Body Diagrams PracticeDocument3 pages2.2 Modeling Forces With Free Body Diagrams PracticeKeagan KelleyNo ratings yet
- Initial Velocity 0 Distance Traveled, S 10m Time T 4s 40 KG Using The Equation of MotionDocument15 pagesInitial Velocity 0 Distance Traveled, S 10m Time T 4s 40 KG Using The Equation of MotionAnonymous ncBe0B9bNo ratings yet
- Statics: Vector Mechanics For EngineersDocument25 pagesStatics: Vector Mechanics For EngineersProkopyo BalagbagNo ratings yet
- 1 4A Free Body DiagramsDocument2 pages1 4A Free Body DiagramssabsabmNo ratings yet
- Starig 205 - Chapter 4 (2D) ProblemsDocument2 pagesStarig 205 - Chapter 4 (2D) ProblemsNeil Anthony Pojas BlancaNo ratings yet
- Analysis of TrussesDocument2 pagesAnalysis of TrussesMelvin Esguerra50% (2)
- Problem P4.17: The Trough of Concrete Weighs 800 Lb. (A) Draw A Free Body Diagram of TheDocument4 pagesProblem P4.17: The Trough of Concrete Weighs 800 Lb. (A) Draw A Free Body Diagram of TheKurtNo ratings yet
- LP 4 Dynamics of Rigid BodiesDocument18 pagesLP 4 Dynamics of Rigid BodiesKent JazminesNo ratings yet
- Forces and Friction WorksheetDocument7 pagesForces and Friction WorksheetJ100% (1)
- Engineering MechanicsDocument100 pagesEngineering MechanicsShahzeb Karamat100% (2)
- Virtual Displacement ExamplesDocument86 pagesVirtual Displacement ExamplesMalik Rehan SyedNo ratings yet
- Force HW SolutionsDocument8 pagesForce HW SolutionsazureusNo ratings yet
- 19 Lecture PPTDocument47 pages19 Lecture PPTFrederick DugayNo ratings yet
- Friction From Meriam PDF 161228121738 PDFDocument62 pagesFriction From Meriam PDF 161228121738 PDFTHEOPHILUS ATO FLETCHERNo ratings yet
- 04 Estruc MaquinasDocument7 pages04 Estruc MaquinasAldo ArteagaNo ratings yet
- Truss Lecture PDFDocument45 pagesTruss Lecture PDFahmadomar89No ratings yet
- Equilibrium of A ParticleDocument39 pagesEquilibrium of A ParticleTayabaNo ratings yet
- Figure 1: A Statically Determinate Beam Subjected To A Point LoadDocument7 pagesFigure 1: A Statically Determinate Beam Subjected To A Point Loadkurou hazamaNo ratings yet
- Vector Mechanics For Engineers: Dynamics: Twelfth EditionDocument73 pagesVector Mechanics For Engineers: Dynamics: Twelfth EditionFady MagedNo ratings yet
- Problem A: Standard:Hs-Ps2-1 Drawing Free-Body Diagrams ProblemDocument2 pagesProblem A: Standard:Hs-Ps2-1 Drawing Free-Body Diagrams ProblemMona Mohamed SafwatNo ratings yet