Download as ppt, pdf, or txt
You might also like
- Calculator Functions For The AP Stats Exam PDFDocument4 pagesCalculator Functions For The AP Stats Exam PDFThrinav SathyaNo ratings yet
- Additive Manufacturing of Metallic Lattice Structures Unconstrained Design, Accurate Fabrication, Fascinated Performances, and ChallengesDocument56 pagesAdditive Manufacturing of Metallic Lattice Structures Unconstrained Design, Accurate Fabrication, Fascinated Performances, and Challengesberk baris celikNo ratings yet
- Finite Element Simulation of Conventional and High Speed Machining of Ti6Al4V AlloyDocument9 pagesFinite Element Simulation of Conventional and High Speed Machining of Ti6Al4V AlloyArul KirubakaranNo ratings yet
- Submitted By: Structural Analysis of Modified Bumper of Car With Honeycomb Structure Using AnsysDocument18 pagesSubmitted By: Structural Analysis of Modified Bumper of Car With Honeycomb Structure Using AnsysAlex Pandian SNo ratings yet
- Design of Lightweight Disc Brake Using Finite Element Analysis and Taguschi TechniqueDocument11 pagesDesign of Lightweight Disc Brake Using Finite Element Analysis and Taguschi Techniquerudey18No ratings yet
- RL 07 Engine Mount Analysis Methodology PiaggioDocument11 pagesRL 07 Engine Mount Analysis Methodology PiaggioYeshwanth KumarNo ratings yet
- Cabin NVHDocument8 pagesCabin NVHIndranil BhattacharyyaNo ratings yet
- Six Sigma Green Belt Examination - Six Sigma - Normal DistributionDocument4 pagesSix Sigma Green Belt Examination - Six Sigma - Normal Distributionupender_840% (1)
- Introduction To Differential EquationsDocument81 pagesIntroduction To Differential EquationsSuhas Phalak80% (5)
- Thompson Et Al. Boundary-Fitted Curvilinear Coordinate Systems For Solution of Partial Differential Equations On Fields Containing Any Number of Arbitrary Two-Dimensional Bodies PDFDocument260 pagesThompson Et Al. Boundary-Fitted Curvilinear Coordinate Systems For Solution of Partial Differential Equations On Fields Containing Any Number of Arbitrary Two-Dimensional Bodies PDFYuriyAKNo ratings yet
- The Finite Element Method: Abdul Razzaq TouqanDocument201 pagesThe Finite Element Method: Abdul Razzaq Touqanمصعب صقر يوسف صعابنه مصعب صقر يوسف صعابنهNo ratings yet
- Procedure For Evaluation of Rubber Bushing ComponentsDocument12 pagesProcedure For Evaluation of Rubber Bushing ComponentsmarcglebNo ratings yet
- Vibro Acoustic Analysis With Flux and Opti Struct FINALDocument31 pagesVibro Acoustic Analysis With Flux and Opti Struct FINALEnmel Martínez BejaranoNo ratings yet
- NEET 2021 Detailed AnalysisDocument12 pagesNEET 2021 Detailed AnalysisMankuNo ratings yet
- Helical Compression Springs. I C: RevisioflDocument34 pagesHelical Compression Springs. I C: Revisioflkamalkraj4002No ratings yet
- Indian Railways: S No. Date/month of Issue Revision /amendment No. Reasons of RevisionDocument24 pagesIndian Railways: S No. Date/month of Issue Revision /amendment No. Reasons of RevisionPremchand BeuraNo ratings yet
- Training Report Loco WorkshopDocument57 pagesTraining Report Loco WorkshopKartica ChouhanNo ratings yet
- Thesis PDFDocument115 pagesThesis PDFstore filesNo ratings yet
- Excel Fatigue AnalysisDocument11 pagesExcel Fatigue AnalysisAli GhNo ratings yet
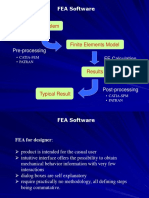
- Process in FEA SoftwareDocument16 pagesProcess in FEA SoftwareMbok Darmi100% (1)
- CAE Lab ManualDocument40 pagesCAE Lab ManualBeesam Ramesh KumarNo ratings yet
- Basic Pro-E Ques and AnswerDocument14 pagesBasic Pro-E Ques and Answerapi-3808872100% (1)
- RADIOSS ElementDocument113 pagesRADIOSS ElementAmolNo ratings yet
- Ansys Lab ManualDocument71 pagesAnsys Lab ManualNish997No ratings yet
- Astm 351 GR - CF 8Document6 pagesAstm 351 GR - CF 8Rajnish KumarNo ratings yet
- Rillej: Portlan'D Cement AssociationDocument328 pagesRillej: Portlan'D Cement AssociationCarlos PEREZ NEYRANo ratings yet
- Eme Ic Engine Module-3 22eme13Document68 pagesEme Ic Engine Module-3 22eme13SHARATH RNo ratings yet
- 10 0000@www Sae Org@2019-26-0116Document7 pages10 0000@www Sae Org@2019-26-0116JasonNo ratings yet
- TSPSC Previouspapers Aee2015 Not8 15 Optional PDFDocument16 pagesTSPSC Previouspapers Aee2015 Not8 15 Optional PDFchetanNo ratings yet
- Mechanical Design: of Machine ComponentsDocument1 pageMechanical Design: of Machine Componentslnina_1No ratings yet
- RK RajputDocument35 pagesRK RajputPragathy MaruthuNo ratings yet
- BITSF110 Course HandoutDocument3 pagesBITSF110 Course HandoutultimateNo ratings yet
- Bracket DrawingDocument1 pageBracket DrawingdhareeshNo ratings yet
- Study and Analysis of Automotive Seating System Riser Design & Development For M1 Category VehicleDocument8 pagesStudy and Analysis of Automotive Seating System Riser Design & Development For M1 Category VehicleFabian BessonNo ratings yet
- Plastics: by Dr. V Phanindra Bogu Dept. of Mech. EnggDocument18 pagesPlastics: by Dr. V Phanindra Bogu Dept. of Mech. EnggV Phanindra BoguNo ratings yet
- Ansys Lab ManualDocument30 pagesAnsys Lab Manualsufyan khalidNo ratings yet
- P6 Presentation-30-3-2021Document68 pagesP6 Presentation-30-3-2021Moiz MalikNo ratings yet
- Design of An Auto-Tilting CarDocument5 pagesDesign of An Auto-Tilting CarVinodh VijayakumarNo ratings yet
- Ansys Workbench: DR A.Gopichand M.Tech, PH.DDocument35 pagesAnsys Workbench: DR A.Gopichand M.Tech, PH.DgopichandallakaNo ratings yet
- Strength of MaterialsDocument22 pagesStrength of MaterialsYogesh YadavNo ratings yet
- Carbon Fibre Reinforced Polymer: Polymer Matrix Composites: Applica-TionsDocument29 pagesCarbon Fibre Reinforced Polymer: Polymer Matrix Composites: Applica-Tionsanis suhailiNo ratings yet
- CAE Analysis in CATIA PDFDocument6 pagesCAE Analysis in CATIA PDFharinaathanNo ratings yet
- Micro Mechanical Behaviour of LaminaDocument65 pagesMicro Mechanical Behaviour of LaminaRajdeep GuptaNo ratings yet
- Centrifugal Clutch Design and EquationsDocument2 pagesCentrifugal Clutch Design and Equationsstallone21No ratings yet
- Introduction To Finite Elements MethodDocument18 pagesIntroduction To Finite Elements Methodmanofvalour100% (6)
- Som Workbook 2.1.22Document124 pagesSom Workbook 2.1.22Mr. Shivam GuptaNo ratings yet
- Brouchure AICTE ATAL FDP On 3D Printing in Industry 4.0Document2 pagesBrouchure AICTE ATAL FDP On 3D Printing in Industry 4.0Vasanthan BNo ratings yet
- FinalDocument48 pagesFinalAnusheenNo ratings yet
- BrahMos ReportDocument15 pagesBrahMos ReportAkhil JaiswalNo ratings yet
- Technical Seminar Presentation HarishDocument21 pagesTechnical Seminar Presentation Harishprashanth nNo ratings yet
- Dynamisch Zuschlag PDFDocument180 pagesDynamisch Zuschlag PDFrake1984No ratings yet
- 1.gate Ies Mech Ace-Som-2021Document21 pages1.gate Ies Mech Ace-Som-2021dsssNo ratings yet
- Eme 4TH ModuleDocument61 pagesEme 4TH ModuleSHARATH RNo ratings yet
- Fracture MechanicsDocument47 pagesFracture MechanicsDEEPAKNo ratings yet
- Proc.-06 Advanced Welding ProcessesDocument28 pagesProc.-06 Advanced Welding ProcessesK JeevanNo ratings yet
- Composites For Machine Tool Beds: National Institute of Technology Rourkela (India)Document64 pagesComposites For Machine Tool Beds: National Institute of Technology Rourkela (India)kunalNo ratings yet
- Design, Analysis and Optimization of Leaf SpringDocument9 pagesDesign, Analysis and Optimization of Leaf SpringTeuku Andy0% (1)
- Finite Element Primer For Engineers: Part 3: Mike Barton & S. D. RajanDocument30 pagesFinite Element Primer For Engineers: Part 3: Mike Barton & S. D. RajanAlfonso Moriñigo AguadoNo ratings yet
- Finite Element Primer For Engineers: Part 3: Mike Barton & S. D. RajanDocument30 pagesFinite Element Primer For Engineers: Part 3: Mike Barton & S. D. RajanJohann BarcelosNo ratings yet
- Finite Element Primer For Engineers: Mike Barton & S. D. RajanDocument26 pagesFinite Element Primer For Engineers: Mike Barton & S. D. Rajanibrahim alshaikhNo ratings yet
- Finite Element Primer For Engineers: Part 3: Mike Barton & S. D. RajanDocument27 pagesFinite Element Primer For Engineers: Part 3: Mike Barton & S. D. Rajanibrahim alshaikhNo ratings yet
- FEM ANSYS Bicycle Frame PDFDocument18 pagesFEM ANSYS Bicycle Frame PDFSankhadeep BhattacharyyaNo ratings yet
- FEM ANSYS Pure Conduction (HT) PDFDocument9 pagesFEM ANSYS Pure Conduction (HT) PDFSankhadeep BhattacharyyaNo ratings yet
- FEM ANSYS Mixed Heat Transfer PDFDocument10 pagesFEM ANSYS Mixed Heat Transfer PDFSankhadeep BhattacharyyaNo ratings yet
- ReferencesDocument12 pagesReferencesArul KirubakaranNo ratings yet
- Advanced Finite Element Analysis - Assignment QuestionsDocument2 pagesAdvanced Finite Element Analysis - Assignment QuestionsArul KirubakaranNo ratings yet
- Finite Element Simulation of Chip Flow in Metal MachiningDocument15 pagesFinite Element Simulation of Chip Flow in Metal MachiningArul KirubakaranNo ratings yet
- International Journal of Machine Tools & Manufacture: G. List, G. Sutter, A. BouthicheDocument9 pagesInternational Journal of Machine Tools & Manufacture: G. List, G. Sutter, A. BouthicheArul KirubakaranNo ratings yet
- A Numeric Investigation of The Rake Face Stress Distribution in Orthogonal MachiningDocument6 pagesA Numeric Investigation of The Rake Face Stress Distribution in Orthogonal MachiningArul KirubakaranNo ratings yet
- Investigations On The Effects of Friction Modeling in Finite Element Simulation of MachiningDocument12 pagesInvestigations On The Effects of Friction Modeling in Finite Element Simulation of MachiningArul KirubakaranNo ratings yet
- Sciencedirect: Keywords: Keywords: Keywords: Keywords: KeywordsDocument11 pagesSciencedirect: Keywords: Keywords: Keywords: Keywords: KeywordsArul KirubakaranNo ratings yet
- Sciencedirect: Analysis of Heat Transfer in Laser Assisted Machining of Slip Cast Fused Silica CeramicsDocument4 pagesSciencedirect: Analysis of Heat Transfer in Laser Assisted Machining of Slip Cast Fused Silica CeramicsArul KirubakaranNo ratings yet
- 10.1016@j.jmapro.2020.04.014 Important 1Document6 pages10.1016@j.jmapro.2020.04.014 Important 1Arul KirubakaranNo ratings yet
- Interview TipsDocument23 pagesInterview TipsArul KirubakaranNo ratings yet
- Group DiscussionDocument27 pagesGroup DiscussionArul KirubakaranNo ratings yet
- Adaptability & Flexibility at WorkplaceDocument33 pagesAdaptability & Flexibility at WorkplaceArul KirubakaranNo ratings yet
- Shape Function For Serendipity Family ElementsDocument4 pagesShape Function For Serendipity Family ElementsArul KirubakaranNo ratings yet
- PrioritizationDocument28 pagesPrioritizationArul KirubakaranNo ratings yet
- Groupdiscussion TomorrowDocument19 pagesGroupdiscussion TomorrowArul KirubakaranNo ratings yet
- Team Work Lecture 2 PDFDocument41 pagesTeam Work Lecture 2 PDFArul KirubakaranNo ratings yet
- How To Make An Effective Presentation?Document45 pagesHow To Make An Effective Presentation?Arul KirubakaranNo ratings yet
- FEM For 3D Solids (Finite Element Method) Part 1Document14 pagesFEM For 3D Solids (Finite Element Method) Part 1Ali Majd LaftaNo ratings yet
- Numerical Analysis: Doron LevyDocument112 pagesNumerical Analysis: Doron LevyEhtisham Ul Haq Arshad100% (1)
- Nurse Education Today: Sandra B. Walker, Dolene M. RossiDocument6 pagesNurse Education Today: Sandra B. Walker, Dolene M. RossinapisahNo ratings yet
- SPSS Lab 4 - Velu Pandian RavichandranDocument10 pagesSPSS Lab 4 - Velu Pandian RavichandranGanesanDurairajNo ratings yet
- 1 Theory: Buffers and Buffer CapacityDocument5 pages1 Theory: Buffers and Buffer Capacitygrim_ripperNo ratings yet
- 1 Differential Eqn - Lecture Notes 6: 1.1 Substitution Methods, Homogeneous Equations, Bernoulli Equa-TionsDocument8 pages1 Differential Eqn - Lecture Notes 6: 1.1 Substitution Methods, Homogeneous Equations, Bernoulli Equa-TionsAfs AsgNo ratings yet
- Complex Numbers WorksheetDocument2 pagesComplex Numbers WorksheetAshley LewisNo ratings yet
- Product of Gaussian DistributionDocument13 pagesProduct of Gaussian DistributionDennis Aprilla ChristieNo ratings yet
- Buckling of Elliptical Plates Under Uniform PressureDocument22 pagesBuckling of Elliptical Plates Under Uniform PressureShashank PatoleNo ratings yet
- Finite Difference ApproximationsDocument11 pagesFinite Difference ApproximationsrockstarNo ratings yet
- Analisa SwotDocument8 pagesAnalisa Swotpuskesmaslosari.brebNo ratings yet
- TOPIC 2 - Functions and Equivalence RelationDocument87 pagesTOPIC 2 - Functions and Equivalence RelationDomz Sensei100% (1)
- Calculus CSM ch02 PDFDocument103 pagesCalculus CSM ch02 PDFAkash GhuleNo ratings yet
- Galgotias University, Greater Noida Uttar Pradesh: Question Bank-1 (Module-II: Calculus (Single Variable) )Document3 pagesGalgotias University, Greater Noida Uttar Pradesh: Question Bank-1 (Module-II: Calculus (Single Variable) )Sunil GuptaNo ratings yet
- L4. Acids. Bases. PH Water Ionization: H O H + Ho +Document4 pagesL4. Acids. Bases. PH Water Ionization: H O H + Ho +anaNo ratings yet
- CBSE Class 9 Mathematics NCERT Solutions Polynomials (Ex. 2.2)Document9 pagesCBSE Class 9 Mathematics NCERT Solutions Polynomials (Ex. 2.2)V GamingNo ratings yet
- Functions and GraphsDocument23 pagesFunctions and GraphsCancan ManlutacNo ratings yet
- Bachelor Thesis SwotDocument6 pagesBachelor Thesis Swotamybakewellfargo100% (2)
- Geostatistics Without TearsDocument116 pagesGeostatistics Without TearsDaniel Ignacio100% (4)
- ABCALC 3-5 Derivatives of Trig Functions WorksheetDocument4 pagesABCALC 3-5 Derivatives of Trig Functions WorksheetLOLNo ratings yet
- An Elementary Proof of The Routh-Hurwitz Stability CriterionDocument14 pagesAn Elementary Proof of The Routh-Hurwitz Stability CriterionmssmsNo ratings yet
- Calculus III - Chain Rule (Assignment Problems)Document3 pagesCalculus III - Chain Rule (Assignment Problems)Shubham PatelNo ratings yet
- Monte Carlo Methods PDFDocument6 pagesMonte Carlo Methods PDFbhuniakanishkaNo ratings yet
- Introduction To Management Science Quantitative Approaches To Decision Making 14th Edition Anderson Solutions Manual DownloadDocument31 pagesIntroduction To Management Science Quantitative Approaches To Decision Making 14th Edition Anderson Solutions Manual DownloadTheresa Harkins100% (22)
- Research Problem, Hypotheses and VariablesDocument11 pagesResearch Problem, Hypotheses and VariablesGILTON MADEME88% (33)
- Reisman Dissertation ReadinglikeaHistorian-AugmentedDocument194 pagesReisman Dissertation ReadinglikeaHistorian-AugmentedfirmezaivanNo ratings yet