Download as ppt, pdf, or txt
You might also like
- 2007 Subaru Forester Service Manual PDF DownloadDocument30 pages2007 Subaru Forester Service Manual PDF Downloadsen til80% (5)
- Dilapidation FinalDocument22 pagesDilapidation FinalShem HaElohim Ejem100% (1)
- Import Export Business PlanDocument25 pagesImport Export Business PlanHimadri Himu100% (1)
- Breather Membranes and Vapour Control Layers in Walls: Technical Note No 33Document10 pagesBreather Membranes and Vapour Control Layers in Walls: Technical Note No 33Kevin Crawford100% (2)
- ENGG002 - 1 - Overview of Dynamics of Rigid BodiesDocument16 pagesENGG002 - 1 - Overview of Dynamics of Rigid BodiesXunhei PinagaNo ratings yet
- Rigid BodyDocument38 pagesRigid BodyVarunNo ratings yet
- ConvolutionDocument32 pagesConvolutionGirijesh Kumar100% (2)
- Transfer Function and Mathematical ModelingDocument32 pagesTransfer Function and Mathematical ModelingsivaramNo ratings yet
- Revise Physics in 1days PDFDocument141 pagesRevise Physics in 1days PDFAkshat PandeyNo ratings yet
- Physics XI: Rotational MotionDocument14 pagesPhysics XI: Rotational MotionSarvesh DubeyNo ratings yet
- PH 101: Sample Questions: FALL 2015: FIG. 1: Tilted Axis GyroscopeDocument9 pagesPH 101: Sample Questions: FALL 2015: FIG. 1: Tilted Axis GyroscopeMihir Kumar MechNo ratings yet
- ECE 345 / ME 380 Introduction To Control Systems Lecture Notes 2Document6 pagesECE 345 / ME 380 Introduction To Control Systems Lecture Notes 2blzz2netNo ratings yet
- Rigid Body Physics SimulationDocument24 pagesRigid Body Physics SimulationOuter SpaceNo ratings yet
- Constraints-Generalized CoordinatesDocument16 pagesConstraints-Generalized CoordinatesVineet ChauhanNo ratings yet
- Mechanics of Rigid BodyDocument21 pagesMechanics of Rigid Bodyhenzel espinaNo ratings yet
- Week 12 - Angular Kinetics ObjectivesDocument23 pagesWeek 12 - Angular Kinetics ObjectivesAnonymous gr5Pr9AVNo ratings yet
- System of Particles and Rotational MotionDocument9 pagesSystem of Particles and Rotational Motionpurupanoti72No ratings yet
- Kinematics: K.1. Definitions and CommentsDocument4 pagesKinematics: K.1. Definitions and CommentsFlorentina PaicaNo ratings yet
- Module 2b - TF of Electrical and Mechanical SystemsDocument61 pagesModule 2b - TF of Electrical and Mechanical SystemsSyed Muhammad AliNo ratings yet
- Lecture Set One A-1 FlattenDocument55 pagesLecture Set One A-1 FlattenAdeduro AyomideNo ratings yet
- Lab 3Document14 pagesLab 3Nino QyNo ratings yet
- Chapter-12 Kinematics of A ParticleDocument16 pagesChapter-12 Kinematics of A ParticlehamzaNo ratings yet
- LagrangianDocument23 pagesLagrangianrp dotgNo ratings yet
- x3 PDFDocument64 pagesx3 PDFfadiNo ratings yet
- Notesd1 PDFDocument32 pagesNotesd1 PDFBrian Quintero ArboledaNo ratings yet
- Dynamica Mehanika DDDDDDDDDFFFDocument57 pagesDynamica Mehanika DDDDDDDDDFFFLeonard ReinaNo ratings yet
- 1.lecture Notes 1 - Kinematics of ParticleDocument15 pages1.lecture Notes 1 - Kinematics of ParticleBlack SkyNo ratings yet
- Introduction To MechanicsDocument10 pagesIntroduction To MechanicsHaniNo ratings yet
- Rectilinear Kinematics: Continuous MotionDocument33 pagesRectilinear Kinematics: Continuous Motionwaheed25No ratings yet
- ME-210 Engineering Dynamics: Dr. Tayyab Zafar Tayyab - Zafar@ceme - Nust.edu - PKDocument31 pagesME-210 Engineering Dynamics: Dr. Tayyab Zafar Tayyab - Zafar@ceme - Nust.edu - PKAbdullah JavaidNo ratings yet
- Industrial Robot AnalysisDocument20 pagesIndustrial Robot AnalysiselkhawadNo ratings yet
- NCERT Solutions For Class 11 Physics Chapter 7 System of Particles and Rotational MotionDocument32 pagesNCERT Solutions For Class 11 Physics Chapter 7 System of Particles and Rotational Motionerfgtrgv vfvvvNo ratings yet
- Digital Signal Processing Important Two Mark Questions With AnswersDocument15 pagesDigital Signal Processing Important Two Mark Questions With AnswerssaiNo ratings yet
- Central+Force 1Document43 pagesCentral+Force 1aljawharahksaNo ratings yet
- Introduction. Configuration Space. Equations of Motion. Velocity Phase SpaceDocument11 pagesIntroduction. Configuration Space. Equations of Motion. Velocity Phase SpaceArjun Kumar SinghNo ratings yet
- MobkinDocument8 pagesMobkinYousef MohammedNo ratings yet
- MEC420 Chapter 1 - Part 1 - StudentDocument31 pagesMEC420 Chapter 1 - Part 1 - StudentMuhammad Azizi bin Abd AzizNo ratings yet
- Game PhysicsDocument51 pagesGame PhysicsbasavarajneererNo ratings yet
- Lecture # 1 (PC-1) PDFDocument20 pagesLecture # 1 (PC-1) PDFShreyanshJainNo ratings yet
- Chapter 10 11Document60 pagesChapter 10 11sharathNo ratings yet
- Chap 10Document63 pagesChap 10sidiquesoomro19No ratings yet
- Signals and Systems: Dr. Mohamed Bingabr University of Central OklahomaDocument44 pagesSignals and Systems: Dr. Mohamed Bingabr University of Central OklahomaadhomeworkNo ratings yet
- General Physics Ch2.1Document11 pagesGeneral Physics Ch2.1nahomNo ratings yet
- General Physics Ch2.1Document7 pagesGeneral Physics Ch2.1nahom teferaNo ratings yet
- OscillationsDocument7 pagesOscillationsjayashriparida09No ratings yet
- Simple Harmonic MotionDocument23 pagesSimple Harmonic MotionAdeeba JunaidiNo ratings yet
- Professor Bidyadhar Subudhi Dept. of Electrical Engineering National Institute of Technology, RourkelaDocument120 pagesProfessor Bidyadhar Subudhi Dept. of Electrical Engineering National Institute of Technology, RourkelaAhmet KılıçNo ratings yet
- Classical Mechanics P601Document1 pageClassical Mechanics P601Satyaki ChowdhuryNo ratings yet
- 5 - Mathematical Modeling Based On Physics LawsDocument37 pages5 - Mathematical Modeling Based On Physics LawsJosueNo ratings yet
- Circular MotionDocument8 pagesCircular MotionGreg Eleftheriou0% (1)
- Planar Kinetic Equations of Motion: Moment of Inertia Parallel-Axis TheoremDocument61 pagesPlanar Kinetic Equations of Motion: Moment of Inertia Parallel-Axis TheoremEvan Hossein PournejadNo ratings yet
- Terrestrial Reference System and FrameDocument34 pagesTerrestrial Reference System and FrameArga Fondra OksapingNo ratings yet
- Unit 5 New PDFDocument52 pagesUnit 5 New PDFAashish BhandariNo ratings yet
- Unit 5 New PDFDocument52 pagesUnit 5 New PDFAashish BhandariNo ratings yet
- C1&C2Document44 pagesC1&C2adugenet52No ratings yet
- Motion Along A Straight Line: in This ChapterDocument22 pagesMotion Along A Straight Line: in This ChapterZiya Can OğuzNo ratings yet
- Unit 1: MAT113: Elementary MechanicsDocument41 pagesUnit 1: MAT113: Elementary MechanicsỌláOlúwakìítán AgboọláNo ratings yet
- Fourier Series Representation of Periodic SignalsDocument62 pagesFourier Series Representation of Periodic SignalsNibasamNo ratings yet
- Tutorial On Quantum MechanicsDocument44 pagesTutorial On Quantum MechanicsC-Hand Ra-Has Rat HodNo ratings yet
- NCERT Solutions For Class 11 Physics 15may Chapter 7 System of Particles and Rotational MotionDocument36 pagesNCERT Solutions For Class 11 Physics 15may Chapter 7 System of Particles and Rotational Motiondaksh tyagiNo ratings yet
- EE435 - Chapter2 - Lec1 - Modeling+Block Diagrams - A.HaddadDocument30 pagesEE435 - Chapter2 - Lec1 - Modeling+Block Diagrams - A.HaddadIbrahim abdoNo ratings yet
- Laplace TransformDocument98 pagesLaplace TransformMihail ColunNo ratings yet
- I 01 - Engineering Mathematics PlusDocument7 pagesI 01 - Engineering Mathematics PlusJohn Pol IgagamaoNo ratings yet
- Chapter IIDocument37 pagesChapter IIJohn Pol Igagamao100% (1)
- Water Resources Engineering: - The Challenges - What We Are Doing About ThemDocument44 pagesWater Resources Engineering: - The Challenges - What We Are Doing About ThemJohn Pol IgagamaoNo ratings yet
- Degree of Bachelor of Science in Civil Engineering OrientationDocument26 pagesDegree of Bachelor of Science in Civil Engineering OrientationJohn Pol IgagamaoNo ratings yet
- 2 - Construction Engineering and ManagementDocument58 pages2 - Construction Engineering and ManagementJohn Pol IgagamaoNo ratings yet
- Buenavista Central Elementary SchoolDocument2 pagesBuenavista Central Elementary Schoolanon_108827268No ratings yet
- Truck Study 2020 PDFDocument30 pagesTruck Study 2020 PDFMainak MukherjeeNo ratings yet
- Rocket ManualDocument1 pageRocket ManualJonEatonNo ratings yet
- Lecture 9 Decision Recognizing RiskDocument21 pagesLecture 9 Decision Recognizing RiskCol. Jerome Carlo Magmanlac, ACPNo ratings yet
- Police ProjectDocument15 pagesPolice ProjectArpit SinghalNo ratings yet
- Material Safety Data Sheet Tenkoz Cypermethrin Insecticide Section 1 Chemical Product and Company IdentificationDocument4 pagesMaterial Safety Data Sheet Tenkoz Cypermethrin Insecticide Section 1 Chemical Product and Company IdentificationzpmNo ratings yet
- Muhammad Saiful Bahri YusoffDocument7 pagesMuhammad Saiful Bahri YusoffRun CapNo ratings yet
- Manzo Food and Cocktail MenuDocument2 pagesManzo Food and Cocktail MenuNell CaseyNo ratings yet
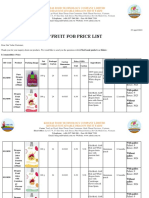
- 1.kim Hai Fob Price List 2019 (New)Document6 pages1.kim Hai Fob Price List 2019 (New)Khanh QuocNo ratings yet
- Rule 11 Gregslangmalakas Copy 2Document12 pagesRule 11 Gregslangmalakas Copy 2Gregorio AchanzarNo ratings yet
- Material 2 SFD and BMDDocument6 pagesMaterial 2 SFD and BMDRafiu SoliuNo ratings yet
- Re92711 - 2021 05 17Document48 pagesRe92711 - 2021 05 17Andie KesumaNo ratings yet
- Chapter 6 Getting Data From The Client (Form Handling)Document43 pagesChapter 6 Getting Data From The Client (Form Handling)shariifcqaadir985No ratings yet
- Mapa de Memoria PLCDocument3 pagesMapa de Memoria PLCJulio C. Garcia RodriguezNo ratings yet
- Ix Astronic BlockdiagramDocument34 pagesIx Astronic BlockdiagramЕвгений АксёновNo ratings yet
- WASP-XM-R-SF6 Pum-Priming Portable SF6 Gas DetectorDocument4 pagesWASP-XM-R-SF6 Pum-Priming Portable SF6 Gas DetectorArif WibisonoNo ratings yet
- What Did Hubble See On Your Birthday NASADocument1 pageWhat Did Hubble See On Your Birthday NASAputri syifaNo ratings yet
- Winsem2020-21 Ece1007 TH Vl2020210507666 Reference Material I 05-Apr-2021 Hetero Junction LedDocument17 pagesWinsem2020-21 Ece1007 TH Vl2020210507666 Reference Material I 05-Apr-2021 Hetero Junction LednikithaNo ratings yet
- Assignment of Innovation and Entrepreneurship of XiaomiDocument14 pagesAssignment of Innovation and Entrepreneurship of XiaomiMd Shoumik HasanNo ratings yet
- Sep Calc Software Price List Oct 11Document1 pageSep Calc Software Price List Oct 11vtnhoemNo ratings yet
- Integrated Mobility & Service Plan - TumakuruDocument20 pagesIntegrated Mobility & Service Plan - TumakuruVinay RajNo ratings yet
- Exxon IP 7-3-1 Sootblowers For Fired EquipmentDocument3 pagesExxon IP 7-3-1 Sootblowers For Fired EquipmentGilvan SilvaNo ratings yet
- Edpack 103 - Assessment of Learning 2 Victoria P. Janeo, LPT, Ms 1Document4 pagesEdpack 103 - Assessment of Learning 2 Victoria P. Janeo, LPT, Ms 1Hector CandidoNo ratings yet
- Engineered Wood Products and An Introduction To Timber Structural SystemsDocument7 pagesEngineered Wood Products and An Introduction To Timber Structural SystemsSang Keun YooNo ratings yet
- Prakas 511 Part 2standard Drawing 3cell Box Culvert PDFDocument51 pagesPrakas 511 Part 2standard Drawing 3cell Box Culvert PDFYa SamolNo ratings yet
- Nirma: UniversityDocument2 pagesNirma: UniversityBHENSDADIYA KEVIN PRABHULALNo ratings yet