Download as ppt, pdf, or txt
You might also like
- Solution Manual For A Second Course in Statistics Regression Analysis 8th Edition William Mendenhall Terry T SincichDocument34 pagesSolution Manual For A Second Course in Statistics Regression Analysis 8th Edition William Mendenhall Terry T SincichEricOrtegaizna98% (44)
- Practical Design of Experiments: DoE Made EasyFrom EverandPractical Design of Experiments: DoE Made EasyRating: 4.5 out of 5 stars4.5/5 (7)
- Ai Chapter 3Document27 pagesAi Chapter 3Ibsa GemechuNo ratings yet
- 015.search Formulation Problems Basic StrategiesDocument121 pages015.search Formulation Problems Basic Strategieskoolnash8784No ratings yet
- Lecture 2: Problem Solving: Delivered by Joel Anandraj.E Ap/ItDocument32 pagesLecture 2: Problem Solving: Delivered by Joel Anandraj.E Ap/ItjoelanandrajNo ratings yet
- Problem Solving and SearchDocument100 pagesProblem Solving and SearchMohammad Omar FaruqNo ratings yet
- 4 Solving Problems by SearchingDocument23 pages4 Solving Problems by Searchingendris yimerNo ratings yet
- Unit II SOLVING PROBLEMS BY SEARCHINGDocument63 pagesUnit II SOLVING PROBLEMS BY SEARCHINGPallavi BhartiNo ratings yet
- AI Unit2 ProblemSolvingDocument191 pagesAI Unit2 ProblemSolvingbtechproject404No ratings yet
- Chapter 3 - Solving Problems by SearchingDocument120 pagesChapter 3 - Solving Problems by SearchingDawit AndargachewNo ratings yet
- Chapter3 Solving Problems by Searching and Constraint Satisfaction ProblemDocument43 pagesChapter3 Solving Problems by Searching and Constraint Satisfaction ProblemRinesh SahadevanNo ratings yet
- Lecture 3 Problem SolvingDocument49 pagesLecture 3 Problem SolvingHarris ChikunyaNo ratings yet
- Chapter 3 - Solving Problems by Searching Concise1Document64 pagesChapter 3 - Solving Problems by Searching Concise1SamiNo ratings yet
- 015.search Formulation Problems Basic StrategiesDocument121 pages015.search Formulation Problems Basic StrategiessupriyaNo ratings yet
- Lecture 3 Problems Solving by SearchingDocument78 pagesLecture 3 Problems Solving by SearchingMd.Ashiqur RahmanNo ratings yet
- Artificial Intelligence Lecture No. 6Document30 pagesArtificial Intelligence Lecture No. 6Syed SamiNo ratings yet
- Chapter 3 Problem Solving AgentsDocument69 pagesChapter 3 Problem Solving Agentshamba AbebeNo ratings yet
- Chapter 3 - Search - Ahmed GuessoumDocument105 pagesChapter 3 - Search - Ahmed GuessoumRandaNo ratings yet
- CH 3 (AI)Document122 pagesCH 3 (AI)Biruk D Real KingNo ratings yet
- 03-AI-Solving Problems by SearchingDocument122 pages03-AI-Solving Problems by SearchingderbewNo ratings yet
- To Build A System To Solve A ProblemDocument60 pagesTo Build A System To Solve A ProblemPiyush DatirNo ratings yet
- Solving Problems by SearchingDocument16 pagesSolving Problems by SearchingPrasidha PrabhuNo ratings yet
- Teach 02 - 2020 Chapter-3Document75 pagesTeach 02 - 2020 Chapter-3abuNo ratings yet
- Artificial Intelligence Chapter 3: Problem Solving and SearchingDocument94 pagesArtificial Intelligence Chapter 3: Problem Solving and SearchingZeeshan Bhatti100% (1)
- Chapter 3 - Solving Problems by Searching ConciseDocument67 pagesChapter 3 - Solving Problems by Searching ConciseSamiNo ratings yet
- Lecture-3 Problems Solving by SearchingDocument79 pagesLecture-3 Problems Solving by SearchingmusaNo ratings yet
- Solving Problems by SearchingDocument82 pagesSolving Problems by SearchingJoyfulness EphaNo ratings yet
- Wa0032.Document193 pagesWa0032.JERWINNo ratings yet
- Solving Problems by Searching FinalDocument69 pagesSolving Problems by Searching Finalasnake ketemaNo ratings yet
- MODULE 1 Part B PDFDocument87 pagesMODULE 1 Part B PDFVinay B RNo ratings yet
- 3.1problem Solving AgentDocument38 pages3.1problem Solving Agentashish.rawatNo ratings yet
- Chapter Three Solving Problems by Searching and Constraint Satisfaction ProblemDocument51 pagesChapter Three Solving Problems by Searching and Constraint Satisfaction Problemfikire belachewNo ratings yet
- Lec 06 - SearchDocument56 pagesLec 06 - SearchMateen AhmedNo ratings yet
- Solving Problems by Searching: Dr. Azhar MahmoodDocument38 pagesSolving Problems by Searching: Dr. Azhar MahmoodMansoor QaisraniNo ratings yet
- Solving Problems by Searching: Artificial IntelligenceDocument43 pagesSolving Problems by Searching: Artificial IntelligenceDai TrongNo ratings yet
- Module 2Document115 pagesModule 2J Christopher ClementNo ratings yet
- Chapter 2 Problem SolvingDocument205 pagesChapter 2 Problem SolvingheadaidsNo ratings yet
- Chapter 2 Problem SolvingDocument190 pagesChapter 2 Problem SolvingMegha GuptaNo ratings yet
- 2021 Lecture03 P1 ProblemSolvingBySearchingDocument43 pages2021 Lecture03 P1 ProblemSolvingBySearchingNguyen ThongNo ratings yet
- 4 - C Problem Solving AgentsDocument17 pages4 - C Problem Solving AgentsPratik RajNo ratings yet
- Chapter 3 - Basics of SearchDocument81 pagesChapter 3 - Basics of SearchsomsonengdaNo ratings yet
- Problem Solving Agent Artificial IntelligenceDocument18 pagesProblem Solving Agent Artificial IntelligenceJust FunNo ratings yet
- FALLSEM2022-23 CBS3004 ETH VL2022230104390 Reference Material I 10-08-2022 2.1 Problem Solving in AIDocument36 pagesFALLSEM2022-23 CBS3004 ETH VL2022230104390 Reference Material I 10-08-2022 2.1 Problem Solving in AIBhimavarapu Sreekar ReddyNo ratings yet
- Chapter Three Solving Problems by Searching and Constraint SatisfactionDocument78 pagesChapter Three Solving Problems by Searching and Constraint SatisfactionderbewNo ratings yet
- AI As The Design of AgentsDocument27 pagesAI As The Design of Agentsa0920936560No ratings yet
- AI2 Problem-SolvingDocument30 pagesAI2 Problem-SolvingAfan AffaidinNo ratings yet
- AI UNIT 2 All NotesDocument19 pagesAI UNIT 2 All NotesSimran BargirNo ratings yet
- AgentsDocument26 pagesAgentsMd ArafatNo ratings yet
- Chapter 3 - Solving Problems by SearchingDocument71 pagesChapter 3 - Solving Problems by SearchingSamiNo ratings yet
- Chapter 3 Solving Problems by Searching1Document96 pagesChapter 3 Solving Problems by Searching1digafeeyuelNo ratings yet
- 02 Solving Problems by Searching (Us)Document48 pages02 Solving Problems by Searching (Us)Joel A. MurilloNo ratings yet
- Unit-2.4 Searching With Partial Observations - CSPs - Back TrackingDocument42 pagesUnit-2.4 Searching With Partial Observations - CSPs - Back Trackingmani111111No ratings yet
- AI - IntroductionDocument17 pagesAI - IntroductionsathyapriyaNo ratings yet
- 3 Chapter3 Part1 VStudDocument74 pages3 Chapter3 Part1 VStudĐình TrườngNo ratings yet
- Unit 2 AIDocument22 pagesUnit 2 AInityamprakasharya123No ratings yet
- Properties of AI ProblemsDocument65 pagesProperties of AI ProblemsUma Shankar SontakeNo ratings yet
- Unit2 (1) - Read-OnlyDocument68 pagesUnit2 (1) - Read-OnlyalistersujoydsouzaNo ratings yet
- 3 Artificial Intelligence - Week3Document18 pages3 Artificial Intelligence - Week3Syed Ali Faiez ZaidiNo ratings yet
- 1.2 Problem Solving - State Space Search (AIML)Document29 pages1.2 Problem Solving - State Space Search (AIML)Dogiparthi ManishaNo ratings yet
- State Space Search Lecture # 2Document34 pagesState Space Search Lecture # 2nazim aliNo ratings yet
- Chapter 3 AIDocument73 pagesChapter 3 AIMULUKEN TILAHUNNo ratings yet
- Chapter 3 & 4-Requirements Elicitation and Analysis IDocument33 pagesChapter 3 & 4-Requirements Elicitation and Analysis IEstifanosNo ratings yet
- CH 1-IntroductionDocument29 pagesCH 1-IntroductionEstifanosNo ratings yet
- Chapter 3 & 4-Requirements Elicitation and Analysis IIDocument68 pagesChapter 3 & 4-Requirements Elicitation and Analysis IIEstifanosNo ratings yet
- Chapter Two: The User Interface Design Process: 2.1. Obstacles and Pitfalls in The Development PathDocument71 pagesChapter Two: The User Interface Design Process: 2.1. Obstacles and Pitfalls in The Development PathEstifanosNo ratings yet
- Chapter 4 Analysis IIDocument48 pagesChapter 4 Analysis IIEstifanosNo ratings yet
- Chap 3 (3) - InformedSearchDocument13 pagesChap 3 (3) - InformedSearchEstifanosNo ratings yet
- Chapter One: Introduction To Human Computer Interaction: Software Engineering Department, Wolkite UniversityDocument39 pagesChapter One: Introduction To Human Computer Interaction: Software Engineering Department, Wolkite UniversityEstifanos0% (1)
- Downloaded From: PreviousexampapersDocument14 pagesDownloaded From: Previousexampapers11B Mithravinda VarmaNo ratings yet
- Final Exam QANT630 Fall 2019 (Part-2)Document14 pagesFinal Exam QANT630 Fall 2019 (Part-2)Simran SachdevaNo ratings yet
- Tutorial No.3 Quality ControlDocument5 pagesTutorial No.3 Quality ControlFarid A GhaniNo ratings yet
- Computational Analysis of Impact of A Bullet Against The Multilayer Fabrics in LS-DYNADocument20 pagesComputational Analysis of Impact of A Bullet Against The Multilayer Fabrics in LS-DYNAPunith MlNo ratings yet
- Supply Chain Design and Analytics: BenefitsDocument2 pagesSupply Chain Design and Analytics: BenefitsStevoIlicNo ratings yet
- 5 Binomial TreesDocument66 pages5 Binomial TreesKim_Sehun_5753100% (1)
- Verification of A Laser Tracker With An Indexed Metrology PlatformDocument12 pagesVerification of A Laser Tracker With An Indexed Metrology PlatformMariNo ratings yet
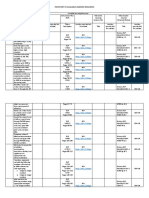
- Inventory of Available Learning Resources: ST THDocument9 pagesInventory of Available Learning Resources: ST THArnold C ZenarosaNo ratings yet
- CAPE Computer Science Unit 1 - ProposalDocument2 pagesCAPE Computer Science Unit 1 - ProposalRafena MustaphaNo ratings yet
- Flowchart 3-Rev1-Equivalent Lateral Force ProcedureDocument9 pagesFlowchart 3-Rev1-Equivalent Lateral Force ProcedurejxsnyderNo ratings yet
- Kir CK Patrick SeidelDocument42 pagesKir CK Patrick Seidelf20210467No ratings yet
- (BAO, 2014) A Simulation-Based Portfolio Optimization Approach With Least Squares LearningDocument6 pages(BAO, 2014) A Simulation-Based Portfolio Optimization Approach With Least Squares LearningarnaudNo ratings yet
- Mis Part 1Document144 pagesMis Part 1pavithra srinivasanNo ratings yet
- KC and NDVI 01Document15 pagesKC and NDVI 01Ranveer SinggNo ratings yet
- 9.4 Tic-Tac-Toe: EE108 Class NotesDocument9 pages9.4 Tic-Tac-Toe: EE108 Class NotesAshish RaiNo ratings yet
- CEN-622 Advanced Foundation Engineering: By: Anumita MishraDocument31 pagesCEN-622 Advanced Foundation Engineering: By: Anumita Mishraabcd efghNo ratings yet
- Adam Ae Final v1Document51 pagesAdam Ae Final v1imk_mithunNo ratings yet
- Measurement System Analysis: VARIABLE STUDY (Average-Range Method)Document1 pageMeasurement System Analysis: VARIABLE STUDY (Average-Range Method)MahendraNo ratings yet
- ECE 5377 / 6377 Power Transmission and Distribution ProjectDocument241 pagesECE 5377 / 6377 Power Transmission and Distribution ProjectRef DocsNo ratings yet
- Critique Positivism PDFDocument22 pagesCritique Positivism PDFtami estradaNo ratings yet
- 4Document11 pages4fitriNo ratings yet
- Project Papers 2006Document352 pagesProject Papers 2006anon_596887959No ratings yet
- tn-19 Pipe Stiffnes Buried Gravity Flow PDFDocument9 pagestn-19 Pipe Stiffnes Buried Gravity Flow PDFCarlos HerreraNo ratings yet
- S.no Name Location Mobile Number Property TypeDocument4 pagesS.no Name Location Mobile Number Property TypeKrisNo ratings yet
- 2 - SDOF - Free VibrationsDocument25 pages2 - SDOF - Free VibrationsTalha EjazNo ratings yet
- Topic 1 Scientific Thinking in ResearchDocument13 pagesTopic 1 Scientific Thinking in ResearchKhairiAkmal100% (1)
- Horizontal Design - Overview: Slew Create or Modify Track Horizontal Track Design Slew AnalysisDocument16 pagesHorizontal Design - Overview: Slew Create or Modify Track Horizontal Track Design Slew AnalysisReepak GuptaNo ratings yet
- A Global Cost Malmquist Productivity Index Using Data Envelopment AnalysisDocument8 pagesA Global Cost Malmquist Productivity Index Using Data Envelopment AnalysisDavid Adeabah OsafoNo ratings yet
- CH 24 HWDocument23 pagesCH 24 HWGiancarlo SantosNo ratings yet