Download as ppt, pdf, or txt
You might also like
- Thermal ConvectionDocument8 pagesThermal ConvectionTAHRIM HOSSAIN RAFIN / UPMNo ratings yet
- Bearing Capacity of FoundationsDocument4 pagesBearing Capacity of FoundationsTshepiso NthiteNo ratings yet
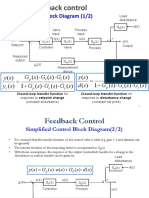
- Feedback Control Systems: Lecture Notes-12/12Document10 pagesFeedback Control Systems: Lecture Notes-12/12Aastha SinghNo ratings yet
- Chapter 5 - Root Locus - HO PDFDocument6 pagesChapter 5 - Root Locus - HO PDFReinaldy MaslimNo ratings yet
- Chapter 3 Stability of DCSDocument34 pagesChapter 3 Stability of DCSAnonymous AFFiZnNo ratings yet
- Polar Plot, Nyquist PlotDocument19 pagesPolar Plot, Nyquist PlotSirshendu100% (1)
- LecttureIIRoot Locus Method 2Document57 pagesLecttureIIRoot Locus Method 2JmbernabeNo ratings yet
- Control L2aDocument17 pagesControl L2avibhore mendirattaNo ratings yet
- Control Sol GA PDFDocument342 pagesControl Sol GA PDFRishabh ShuklaNo ratings yet
- Control Systems Theory: Sinusoidal Tools STB 35103Document42 pagesControl Systems Theory: Sinusoidal Tools STB 35103Akula VeerrajuNo ratings yet
- Chapter 1-Root LocusDocument52 pagesChapter 1-Root Locusmuiz_jojoNo ratings yet
- Nyquist PlotDocument28 pagesNyquist PlotLloyds RajaNo ratings yet
- Fall 2010 Control Systems (EEE 226) Unit-3 Frequency Response Analysis Faculty: Ramesh Babu. NDocument40 pagesFall 2010 Control Systems (EEE 226) Unit-3 Frequency Response Analysis Faculty: Ramesh Babu. NVijay IndukuriNo ratings yet
- Lectures 5 - Frequency Response: K. J. ÅströmDocument11 pagesLectures 5 - Frequency Response: K. J. ÅströmEdutamNo ratings yet
- Notes-Nyquist Plot and Stability CriteriaDocument16 pagesNotes-Nyquist Plot and Stability CriteriaGanesh RadharamNo ratings yet
- Bode Plot Bds 26 3 2015 PDFDocument148 pagesBode Plot Bds 26 3 2015 PDFNikhil PatwariNo ratings yet
- Signal and System Lecture 21Document22 pagesSignal and System Lecture 21ali_rehman87No ratings yet
- Control Theory: Germán Andrés Ramos, PHDDocument45 pagesControl Theory: Germán Andrés Ramos, PHDJuan David CarrilloNo ratings yet
- Module 3Document40 pagesModule 3AlphaBravoNo ratings yet
- IC6701 May 18 With KeyDocument14 pagesIC6701 May 18 With KeyAnonymous yO7rcec6vuNo ratings yet
- Linear Control SystemsDocument76 pagesLinear Control SystemsKamran TariqNo ratings yet
- A6 SolutionDocument8 pagesA6 SolutionRaja KumarNo ratings yet
- EP 5511 - Lecture 07Document33 pagesEP 5511 - Lecture 07Solomon Tadesse AthlawNo ratings yet
- Chapter3 2Document12 pagesChapter3 2hailegebreselassie24No ratings yet
- VL2022230502064 Da02Document2 pagesVL2022230502064 Da02Asmit Anand Singh 21BEE0130No ratings yet
- TUTORIAL 5 - StabilityDocument6 pagesTUTORIAL 5 - StabilitytiraNo ratings yet
- Frequency ResponseDocument62 pagesFrequency ResponseSujin PrajapatiNo ratings yet
- Time Response PDFDocument104 pagesTime Response PDFMeshach KumarNo ratings yet
- 5 Block Diagram Representation of LTI SystemsDocument7 pages5 Block Diagram Representation of LTI SystemsDj OoNo ratings yet
- Tutorial 11Document25 pagesTutorial 11Yang ElvisQUNo ratings yet
- T FN, Pole-Zeros, Block Diagram & SFGDocument28 pagesT FN, Pole-Zeros, Block Diagram & SFGArsal AslamNo ratings yet
- Ch11-Dynamic Behavior & Stability of Closed-Loop Control System.Document15 pagesCh11-Dynamic Behavior & Stability of Closed-Loop Control System.Mark GoodmoreNo ratings yet
- Chapter 6slideDocument72 pagesChapter 6slidehailegebreselassie24No ratings yet
- Feedback Control LectureDocument16 pagesFeedback Control LecturepierrefreNo ratings yet
- Chapter 6 SRDocument137 pagesChapter 6 SRMadhusmita BarikNo ratings yet
- m5 Lec4Document5 pagesm5 Lec4VIKAS BHATINo ratings yet
- The Nyquist Stability CriterionDocument39 pagesThe Nyquist Stability CriterionNur AfiqahNo ratings yet
- DSK NyquistDocument19 pagesDSK NyquistRahmat Wahyu PratamaNo ratings yet
- Lect 8 Dynamic Behaviour of Feedback Controller ProcessDocument12 pagesLect 8 Dynamic Behaviour of Feedback Controller ProcessZaidoon MohsinNo ratings yet
- Nyquist HandoutDocument73 pagesNyquist HandoutAhmed SaidNo ratings yet
- B - Lecture14 Stability in The Frequency Domain and Relative Stability Automatic Control SystemDocument16 pagesB - Lecture14 Stability in The Frequency Domain and Relative Stability Automatic Control SystemAbaziz Mousa OutlawZzNo ratings yet
- KOM 3781 Discrete-Time Control Systems: Veysel GaziDocument72 pagesKOM 3781 Discrete-Time Control Systems: Veysel GaziFatih CanbolatNo ratings yet
- Root LocusDocument44 pagesRoot LocusDheer MehrotraNo ratings yet
- Procesos de AutomatizaciónDocument9 pagesProcesos de AutomatizaciónIsraelNo ratings yet
- Chapter 11 - Closed Loop Control SystemsDocument22 pagesChapter 11 - Closed Loop Control SystemsAdner RomeroNo ratings yet
- Lecture - 2 Block Signal FlowDocument77 pagesLecture - 2 Block Signal Flowkibwe anthoNo ratings yet
- Arijit Nath - Nyquist PlotDocument8 pagesArijit Nath - Nyquist PlotTry meNo ratings yet
- CS 10Document27 pagesCS 10Kavya MamillaNo ratings yet
- Response and Stability Analysis in Frequency DomainDocument54 pagesResponse and Stability Analysis in Frequency DomainMYNAMENo ratings yet
- Lecture 7 - Steady State ErrorDocument15 pagesLecture 7 - Steady State ErrorAfiq AzharNo ratings yet
- Feedback Control SystemDocument32 pagesFeedback Control SystemKelvin KongNo ratings yet
- 5 Block Diagram Representation of LTI Systems: U (T) G(S) y (T)Document3 pages5 Block Diagram Representation of LTI Systems: U (T) G(S) y (T)Yassine DjillaliNo ratings yet
- 08 Frequency Response Methods MechDocument21 pages08 Frequency Response Methods MechMamodiNo ratings yet
- Nyquist Plot and Stability Criteria - GATE Study Material in PDFDocument7 pagesNyquist Plot and Stability Criteria - GATE Study Material in PDFnidhi tripathiNo ratings yet
- Funciones de TransferenciaDocument69 pagesFunciones de TransferenciaAlejandro SanvicenteNo ratings yet
- Chapter 11 - Closed Loop Control SystemsDocument22 pagesChapter 11 - Closed Loop Control SystemsAdner RomeroNo ratings yet
- DSP Module 4 NotesDocument16 pagesDSP Module 4 NotesChetan Naik massand100% (1)
- Chapter 3Document37 pagesChapter 3Izzat AiresNo ratings yet
- MOOC Assignment-3 Answers PDFDocument15 pagesMOOC Assignment-3 Answers PDFvamshiNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Scattering Theory for Automorphic Functions. (AM-87), Volume 87From EverandScattering Theory for Automorphic Functions. (AM-87), Volume 87No ratings yet
- PDFDocument52 pagesPDFzhobeysNo ratings yet
- Cryogenic StorageDocument244 pagesCryogenic StorageVijayakumarBaskar100% (1)
- Clarion Reverse Camera GuideDocument20 pagesClarion Reverse Camera Guidegamer1No ratings yet
- An Integrated Energy Storage Scheme For A Dispatchable Solar and Wind Powered Energy SystemDocument13 pagesAn Integrated Energy Storage Scheme For A Dispatchable Solar and Wind Powered Energy SystemManohar ChamanaNo ratings yet
- Metalargy MCQDocument12 pagesMetalargy MCQANANT CHAUBEYNo ratings yet
- POP Goes The UniverseDocument8 pagesPOP Goes The UniverseCarla MillNo ratings yet
- Pp07 - Asep - NSCP 2015 Update On Ch4 Structural Concrete Part 2Document23 pagesPp07 - Asep - NSCP 2015 Update On Ch4 Structural Concrete Part 2Carlo Joseph100% (4)
- HS2161 Technical English - IIDocument12 pagesHS2161 Technical English - IIK.Daisy Graceline SornaNo ratings yet
- 8: Mechanics 2 - Topic Questions Paper 6: Year Series Paper NumberDocument11 pages8: Mechanics 2 - Topic Questions Paper 6: Year Series Paper NumberrobinsonNo ratings yet
- Sem 3 - Lab Metacentric ApparatusDocument7 pagesSem 3 - Lab Metacentric ApparatusLuqman HakimNo ratings yet
- Finite Element by Tarun KantDocument7 pagesFinite Element by Tarun KantVijayraj11No ratings yet
- Beauty in MathematicsDocument464 pagesBeauty in MathematicsSamuel Alfred ForemanNo ratings yet
- Forma CalibraciónDocument7 pagesForma CalibracióndeivisroseroNo ratings yet
- Rilsan Fine Powders Physical PropertiesDocument2 pagesRilsan Fine Powders Physical Propertiesธนาชัย เต็งจิรธนาภาNo ratings yet
- Design GtstrudlDocument352 pagesDesign Gtstrudleuric82No ratings yet
- 9702 w17 Ms 35Document6 pages9702 w17 Ms 35engrroyNo ratings yet
- Z Serie Installation and Connection ArmDocument44 pagesZ Serie Installation and Connection ArmMarton TasnadiNo ratings yet
- Intermolecular Forces and Solids and LiquidsDocument38 pagesIntermolecular Forces and Solids and LiquidsAllen EspinosaNo ratings yet
- ID F FT NN0 TQD FP 11 0005 - R3 - Technical Query To Change Driven Pile To Drag Anchor AwcDocument20 pagesID F FT NN0 TQD FP 11 0005 - R3 - Technical Query To Change Driven Pile To Drag Anchor AwcmutadiNo ratings yet
- Iit Jee Screening 2001Document9 pagesIit Jee Screening 2001Ashish535No ratings yet
- Pressure Vessel Design CalcDocument48 pagesPressure Vessel Design CalcSyed Zain AliNo ratings yet
- Polarography 160508035043Document25 pagesPolarography 160508035043Mahmoud MahmoudmNo ratings yet
- Gold ReviewDocument21 pagesGold ReviewVladimir ZhukovNo ratings yet
- Sodium Hypochlorite: 1-Determination of Available Chlorine and Excess Caustic SodaDocument2 pagesSodium Hypochlorite: 1-Determination of Available Chlorine and Excess Caustic SodafahemNo ratings yet
- Boat andDocument7 pagesBoat andAnonymous EvbW4o1U7No ratings yet
- Image Compression: JPEG: Summary: SourcesDocument21 pagesImage Compression: JPEG: Summary: SourcesNgô Hiếu TrườngNo ratings yet
- Ea 1976 03 PDFDocument132 pagesEa 1976 03 PDFLuis Carlos Silva50% (2)