
1.sequential Circuits
1.sequential Circuits
You might also like
- Scilab FamiliarizationDocument8 pagesScilab FamiliarizationTonie Adrian Diamante100% (1)
- Course Outline - Digital Logic DesignDocument10 pagesCourse Outline - Digital Logic DesignTauqir HassanNo ratings yet
- Digital Image Processing - Unit 3 - Week 2 - Aast2Document5 pagesDigital Image Processing - Unit 3 - Week 2 - Aast2vidhya ds100% (1)
- 1.deep Learning Assignment1 Solutions 1Document12 pages1.deep Learning Assignment1 Solutions 1vidhya ds100% (3)
- TRNG Handouts For Project PLNG & MGMT Wkshop 27 Nov 1dec 201 248Document48 pagesTRNG Handouts For Project PLNG & MGMT Wkshop 27 Nov 1dec 201 248vidhya dsNo ratings yet
- 4 Sequential CircuitsDocument65 pages4 Sequential CircuitsAnonymous tM7hFSNo ratings yet
- Counter DesignDocument7 pagesCounter Designsujaganesan2009No ratings yet
- Design and Implement A Four Bit Adder Using Logic Gate ICsDocument10 pagesDesign and Implement A Four Bit Adder Using Logic Gate ICsahsan khanNo ratings yet
- A Simple Laplace Transform Is Conducted While Sending Signals Over Any TwoDocument2 pagesA Simple Laplace Transform Is Conducted While Sending Signals Over Any TwohamryNo ratings yet
- Electrical Power GenerationDocument15 pagesElectrical Power GenerationShivaraja GNo ratings yet
- Chapter 11 Resonance in AC CircuitsDocument40 pagesChapter 11 Resonance in AC CircuitsGaurav SinghalNo ratings yet
- THE PUBLIC TELEPHONE NETWORK 18 1 To 18 9Document50 pagesTHE PUBLIC TELEPHONE NETWORK 18 1 To 18 9ahraf jalaluddinNo ratings yet
- LAB Experiment 1 GROUP NO.7Document6 pagesLAB Experiment 1 GROUP NO.7Janpherson BellecaNo ratings yet
- 10a 3 Bit Up Down Counter DoneDocument6 pages10a 3 Bit Up Down Counter DoneVenkatGollaNo ratings yet
- Combinational Circuits LDICDocument129 pagesCombinational Circuits LDIChemanth ramireddyNo ratings yet
- EC8491 CT Notes Full - by WWW - EasyEngineering.net 4 PDFDocument152 pagesEC8491 CT Notes Full - by WWW - EasyEngineering.net 4 PDFvijay kumarNo ratings yet
- Lesson 5 - Lecture in Algorithm and Flowcharting: Introduction To Programming LanguagesDocument46 pagesLesson 5 - Lecture in Algorithm and Flowcharting: Introduction To Programming LanguagesGucci Gutierrez0% (1)
- BJT and FET ReviewDocument99 pagesBJT and FET ReviewRedenel SerquinaNo ratings yet
- 4 - C++ Operators PDFDocument34 pages4 - C++ Operators PDFRicha GoyalNo ratings yet
- Microprocessors & Interfacing Techniques Assignment No. 2Document2 pagesMicroprocessors & Interfacing Techniques Assignment No. 2Abdullah Nasir100% (4)
- Digital Electronics Ec 1201Document34 pagesDigital Electronics Ec 1201ainugiri100% (1)
- Single Source Shortest Path Unit-3Document43 pagesSingle Source Shortest Path Unit-3Phani Kumar100% (1)
- 18Csc203J:Computer Organization and ArchitectureDocument56 pages18Csc203J:Computer Organization and ArchitectureSENTHIL RNo ratings yet
- Chapter 3 - Describing Logic Circuits - Dr. XuDocument86 pagesChapter 3 - Describing Logic Circuits - Dr. XuTimothy Ivan YosepNo ratings yet
- Digital System Module 4 PDFDocument52 pagesDigital System Module 4 PDFGeethanjali.pNo ratings yet
- Digital Logic ManualDocument14 pagesDigital Logic ManualJana Bhawana CampusNo ratings yet
- Prototype of A Fingerprint Based Licensing System For DrivingDocument6 pagesPrototype of A Fingerprint Based Licensing System For DrivingarshadshareefmdNo ratings yet
- "Virtual Instrumentation": Dr. Jovitha JeromeDocument41 pages"Virtual Instrumentation": Dr. Jovitha JeromeRavichandranNo ratings yet
- COMP1. L4. Selection Control StructureDocument10 pagesCOMP1. L4. Selection Control StructureJm SalvaniaNo ratings yet
- Experiment No 3Document20 pagesExperiment No 3Ako C SeanNo ratings yet
- Module 2Document46 pagesModule 2gokulNo ratings yet
- Single Phase Full Wave Voltage Multiplier PDFDocument3 pagesSingle Phase Full Wave Voltage Multiplier PDFJoshua Amiel javines0% (1)
- DECENA - IBE - Laboratory Exercise No 6Document16 pagesDECENA - IBE - Laboratory Exercise No 6John Rhey IbeNo ratings yet
- Time Domain Representation of Linear Time Invariant (LTI) SystemsDocument54 pagesTime Domain Representation of Linear Time Invariant (LTI) SystemsLai Yon PengNo ratings yet
- Memories and PLDsDocument47 pagesMemories and PLDsHimanshu Khanduri100% (1)
- Assignment Prelim2018Document7 pagesAssignment Prelim2018Joshua Refe50% (2)
- LogicDocument24 pagesLogicNeelam KapoorNo ratings yet
- AutocadDocument39 pagesAutocadAmexTesfayeKoraNo ratings yet
- Chapter 6 Registers & CountersDocument29 pagesChapter 6 Registers & CountersBenjamin Button100% (1)
- Convolution LectureDocument11 pagesConvolution Lecturespong1ertzNo ratings yet
- Experiment 1 Breadboard ImplementationDocument3 pagesExperiment 1 Breadboard ImplementationJeremy Lorenzo Teodoro VirataNo ratings yet
- Write A Pseudocode To Find The Largest of Two NumbersDocument36 pagesWrite A Pseudocode To Find The Largest of Two NumbersTriphine UwanyirigiraNo ratings yet
- Digital Electronics Circuits: Experiment: 9Document4 pagesDigital Electronics Circuits: Experiment: 9movabNo ratings yet
- Implementation of Logic Gate in PLC Using Ladder Programming LanguageDocument29 pagesImplementation of Logic Gate in PLC Using Ladder Programming LanguageAvinash RajNo ratings yet
- LIC+C Lab Manual-17 FinalDocument59 pagesLIC+C Lab Manual-17 FinalDhanush Gowda D TNo ratings yet
- DLD - Ch.1 Notes PDFDocument35 pagesDLD - Ch.1 Notes PDFAlradi Malak FadiNo ratings yet
- Two-Port Network: Chapter - ViDocument21 pagesTwo-Port Network: Chapter - ViKiranmai SrinivasuluNo ratings yet
- DLD LAB REPORT 3Document8 pagesDLD LAB REPORT 3HimelNo ratings yet
- Basic Digital Logic Design Notes PDFDocument138 pagesBasic Digital Logic Design Notes PDFnandams100% (1)
- Polar Plot, Nyquist PlotDocument19 pagesPolar Plot, Nyquist PlotSirshendu100% (1)
- JK Flip FlopDocument9 pagesJK Flip FlopNelson RajaNo ratings yet
- Unit-1 PPT-Concepts in VHDLDocument58 pagesUnit-1 PPT-Concepts in VHDLSUMASRI MNo ratings yet
- Pulse ModulationDocument20 pagesPulse ModulationmirapazcookeNo ratings yet
- Ece-Vii-dsp Algorithms & Architecture (10ec751) - AssignmentDocument9 pagesEce-Vii-dsp Algorithms & Architecture (10ec751) - AssignmentMuhammadMansoorGohar100% (1)
- Counter Circuits: ObjectivesDocument9 pagesCounter Circuits: ObjectivesRuhul Amin Khalil100% (1)
- Digital Logic Design For Boolen AlgebraDocument77 pagesDigital Logic Design For Boolen AlgebraJammalamadugu RavindranadhNo ratings yet
- OSI Unified View of Protocols and Services: Unit 01.02.02 CS 5220: Computer CommunicationsDocument14 pagesOSI Unified View of Protocols and Services: Unit 01.02.02 CS 5220: Computer CommunicationsAMRIT SAHNo ratings yet
- To Design An Adaptive Channel Equalizer Using MATLABDocument43 pagesTo Design An Adaptive Channel Equalizer Using MATLABAngel Pushpa100% (1)
- Unit-V Sequential Circuits & MemoriesDocument54 pagesUnit-V Sequential Circuits & Memories20H51A04K4-CHINTALAPATI MEGHANA B.Tech ECE (2020-24)No ratings yet
- Unit-V Sequential CircuitsDocument15 pagesUnit-V Sequential CircuitsDr A Pradeep Kumar asst.Prof(ECE)No ratings yet
- Class FlipflopsDocument44 pagesClass FlipflopsRanjith PNo ratings yet
- CSE 260 Digital Logic Design: Sequential Logic, RS Flip-Flop, D Flip-Flop, JK Flip-Flop, T Flip-Flop BRAC UniversityDocument27 pagesCSE 260 Digital Logic Design: Sequential Logic, RS Flip-Flop, D Flip-Flop, JK Flip-Flop, T Flip-Flop BRAC UniversityTECH BANGLADESHNo ratings yet
- Flip Flop and Types NotesDocument22 pagesFlip Flop and Types Notespmclasses28No ratings yet
- Latex/C2/Mathematical-Typesetting/English: Script - FormatDocument8 pagesLatex/C2/Mathematical-Typesetting/English: Script - Formatvidhya dsNo ratings yet
- Latex/C2/Equations/English: Visual Cue NarrationDocument6 pagesLatex/C2/Equations/English: Visual Cue Narrationvidhya dsNo ratings yet
- Latex/C2/Report-Writing/English: Author: Prof Kannan Moudgalya DateDocument7 pagesLatex/C2/Report-Writing/English: Author: Prof Kannan Moudgalya Datevidhya dsNo ratings yet
- Arduino Tutorial #1 - Getting Started and ConnectedDocument5 pagesArduino Tutorial #1 - Getting Started and Connectedvidhya dsNo ratings yet
- Nexys4™ PDM Filter Project: Revised February 3, 2014 This Manual Applies To The Nexys4 Rev. BDocument12 pagesNexys4™ PDM Filter Project: Revised February 3, 2014 This Manual Applies To The Nexys4 Rev. Bvidhya dsNo ratings yet
- 1.LaTeX On Windows Using TeXworksDocument8 pages1.LaTeX On Windows Using TeXworksvidhya dsNo ratings yet
- 3.letter WritingDocument2 pages3.letter Writingvidhya dsNo ratings yet
- Assignments Week02Document4 pagesAssignments Week02vidhya dsNo ratings yet
- Matlab PDFDocument1 pageMatlab PDFvidhya dsNo ratings yet
- Week 1: Assignment: Customization Cost That Is To Be Separately Borne by Every Customer."Document3 pagesWeek 1: Assignment: Customization Cost That Is To Be Separately Borne by Every Customer."vidhya dsNo ratings yet
- Slides Week8 PDFDocument46 pagesSlides Week8 PDFvidhya dsNo ratings yet
- Assignments Week08Document4 pagesAssignments Week08vidhya dsNo ratings yet
- Assignment 8 PDFDocument9 pagesAssignment 8 PDFvidhya dsNo ratings yet
- Ece Vii & ViiiDocument62 pagesEce Vii & Viiividhya dsNo ratings yet
- Lec 10Document36 pagesLec 10vidhya dsNo ratings yet
- Deep Learning Assignment0Document15 pagesDeep Learning Assignment0vidhya dsNo ratings yet
- 4.deep Learning Assignment4 Solution PDFDocument12 pages4.deep Learning Assignment4 Solution PDFvidhya ds100% (1)
- Refer Slide Time 00:17Document32 pagesRefer Slide Time 00:17vidhya dsNo ratings yet
- TRNG Handouts For Project PLNG & MGMT Wkshop 27 Nov 1dec 151 200Document50 pagesTRNG Handouts For Project PLNG & MGMT Wkshop 27 Nov 1dec 151 200vidhya dsNo ratings yet
- Assignment 8Document9 pagesAssignment 8vidhya dsNo ratings yet
- I F P G A (Fpga) : Ntroduction To Ield Rogrammable ATE Rrays SDocument13 pagesI F P G A (Fpga) : Ntroduction To Ield Rogrammable ATE Rrays Svidhya dsNo ratings yet
- gpdk090 DRM PDFDocument130 pagesgpdk090 DRM PDFVikas JainNo ratings yet
- Mindwave Arduino and LedsDocument6 pagesMindwave Arduino and LedsJordan RoweNo ratings yet
- 7680v2.3 (G52 76801XH) (H61MU E35 - H61M E33 - H61M E23 - H61M P33) EURODocument138 pages7680v2.3 (G52 76801XH) (H61MU E35 - H61M E33 - H61M E23 - H61M P33) EUROvulcanussNo ratings yet
- Camera Calculator - Copy Machine - Play StationDocument2 pagesCamera Calculator - Copy Machine - Play StationAndy Rilis100% (1)
- Load Cell Calibration AE301 StellaflexDocument2 pagesLoad Cell Calibration AE301 Stellaflexfjrr231294No ratings yet
- Malaysian Spectrum Licensing Framework - Stella Jeevamani NavaratnamDocument23 pagesMalaysian Spectrum Licensing Framework - Stella Jeevamani NavaratnamRazman RashidNo ratings yet
- JBL GTO1004 SMDocument27 pagesJBL GTO1004 SMautreraNo ratings yet
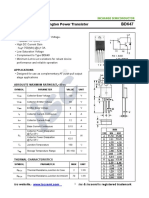
- Isc BD647: Silicon NPN Darlington Power TransistorDocument2 pagesIsc BD647: Silicon NPN Darlington Power Transistornanodocl5099No ratings yet
- Current Sharing Control of Parallel Bidirectional DC-DC Converter For Energy Storage Applications in Islanded MicrogridDocument6 pagesCurrent Sharing Control of Parallel Bidirectional DC-DC Converter For Energy Storage Applications in Islanded MicrogridariphineNo ratings yet
- What Is PLC?Document3 pagesWhat Is PLC?AnirbanSenNo ratings yet
- Kal Sys20 en 2V2 Rec 102-020401275Document8 pagesKal Sys20 en 2V2 Rec 102-020401275Amir IzzatNo ratings yet
- 10 LAGU InstallationDocument34 pages10 LAGU InstallationLavanya Mummadi50% (2)
- Classifications of ComputersDocument3 pagesClassifications of Computersjaimededios80% (5)
- KDC-319/4019 KDC-5020: Service ManualDocument19 pagesKDC-319/4019 KDC-5020: Service ManualDaniel Norberto DemariaNo ratings yet
- Manual Midas VeronaDocument52 pagesManual Midas VeronaJairoGRNo ratings yet
- 3G LTE Network Capacity ManagementDocument62 pages3G LTE Network Capacity Managementumair.the.1339No ratings yet
- TVS Clamping Protection Mode: Application NoteDocument17 pagesTVS Clamping Protection Mode: Application NoteMUHAMMED NASEEF MKNo ratings yet
- Question Paper Code:: Reg. No.Document3 pagesQuestion Paper Code:: Reg. No.karthick VijayanNo ratings yet
- CSE 3711 Lecture-No. 2 (Summer 2023) - Computer Networks and The InternetDocument101 pagesCSE 3711 Lecture-No. 2 (Summer 2023) - Computer Networks and The InternetsaifulNo ratings yet
- TK-760HG/762HG: Service Manual SupplementDocument41 pagesTK-760HG/762HG: Service Manual SupplementTiago TelesNo ratings yet
- Modulation Part 8 of 10Document4 pagesModulation Part 8 of 10nonotjenNo ratings yet
- Building A Future-Proof Data-Processing Solution With Intelligent IoT Gateways 1Document6 pagesBuilding A Future-Proof Data-Processing Solution With Intelligent IoT Gateways 1Adnan SalihbegovicNo ratings yet
- jψ jωt jφ jωt jωt jψ jφDocument12 pagesjψ jωt jφ jωt jωt jψ jφElectrical EngineersNo ratings yet
- 72 Pin SIMM ModulesDocument4 pages72 Pin SIMM Modulessubroto bosuNo ratings yet
- XMC1100 Boot Kit: Getting StartedDocument42 pagesXMC1100 Boot Kit: Getting StartedAsdasda AsdasdsadNo ratings yet
- Item 2.1 - 1SNA645001R0300-rb121-24vuc-interface-relay-r600-1c-o-a1-a2-24vac-dc-5-250vac-60ma-6aDocument3 pagesItem 2.1 - 1SNA645001R0300-rb121-24vuc-interface-relay-r600-1c-o-a1-a2-24vac-dc-5-250vac-60ma-6aTiennghia BuiNo ratings yet
- Zspi Rotc Unit: Introduction To Signal CommunicationDocument13 pagesZspi Rotc Unit: Introduction To Signal CommunicationLordje Divine EmotinNo ratings yet
- EE304 Poster TemplateDocument1 pageEE304 Poster TemplateKevin JoseNo ratings yet
- домофонDocument12 pagesдомофонСтоян МитевNo ratings yet
- Zte Mf628 Hsdpa Usb Modem Quick User GuideDocument9 pagesZte Mf628 Hsdpa Usb Modem Quick User GuidePooja PatelNo ratings yet
















































































































Download as ppt, pdf, or txt
You might also like
- Scilab FamiliarizationDocument8 pagesScilab FamiliarizationTonie Adrian Diamante100% (1)
- Course Outline - Digital Logic DesignDocument10 pagesCourse Outline - Digital Logic DesignTauqir HassanNo ratings yet
- Digital Image Processing - Unit 3 - Week 2 - Aast2Document5 pagesDigital Image Processing - Unit 3 - Week 2 - Aast2vidhya ds100% (1)
- 1.deep Learning Assignment1 Solutions 1Document12 pages1.deep Learning Assignment1 Solutions 1vidhya ds100% (3)
- TRNG Handouts For Project PLNG & MGMT Wkshop 27 Nov 1dec 201 248Document48 pagesTRNG Handouts For Project PLNG & MGMT Wkshop 27 Nov 1dec 201 248vidhya dsNo ratings yet
- 4 Sequential CircuitsDocument65 pages4 Sequential CircuitsAnonymous tM7hFSNo ratings yet
- Counter DesignDocument7 pagesCounter Designsujaganesan2009No ratings yet
- Design and Implement A Four Bit Adder Using Logic Gate ICsDocument10 pagesDesign and Implement A Four Bit Adder Using Logic Gate ICsahsan khanNo ratings yet
- A Simple Laplace Transform Is Conducted While Sending Signals Over Any TwoDocument2 pagesA Simple Laplace Transform Is Conducted While Sending Signals Over Any TwohamryNo ratings yet
- Electrical Power GenerationDocument15 pagesElectrical Power GenerationShivaraja GNo ratings yet
- Chapter 11 Resonance in AC CircuitsDocument40 pagesChapter 11 Resonance in AC CircuitsGaurav SinghalNo ratings yet
- THE PUBLIC TELEPHONE NETWORK 18 1 To 18 9Document50 pagesTHE PUBLIC TELEPHONE NETWORK 18 1 To 18 9ahraf jalaluddinNo ratings yet
- LAB Experiment 1 GROUP NO.7Document6 pagesLAB Experiment 1 GROUP NO.7Janpherson BellecaNo ratings yet
- 10a 3 Bit Up Down Counter DoneDocument6 pages10a 3 Bit Up Down Counter DoneVenkatGollaNo ratings yet
- Combinational Circuits LDICDocument129 pagesCombinational Circuits LDIChemanth ramireddyNo ratings yet
- EC8491 CT Notes Full - by WWW - EasyEngineering.net 4 PDFDocument152 pagesEC8491 CT Notes Full - by WWW - EasyEngineering.net 4 PDFvijay kumarNo ratings yet
- Lesson 5 - Lecture in Algorithm and Flowcharting: Introduction To Programming LanguagesDocument46 pagesLesson 5 - Lecture in Algorithm and Flowcharting: Introduction To Programming LanguagesGucci Gutierrez0% (1)
- BJT and FET ReviewDocument99 pagesBJT and FET ReviewRedenel SerquinaNo ratings yet
- 4 - C++ Operators PDFDocument34 pages4 - C++ Operators PDFRicha GoyalNo ratings yet
- Microprocessors & Interfacing Techniques Assignment No. 2Document2 pagesMicroprocessors & Interfacing Techniques Assignment No. 2Abdullah Nasir100% (4)
- Digital Electronics Ec 1201Document34 pagesDigital Electronics Ec 1201ainugiri100% (1)
- Single Source Shortest Path Unit-3Document43 pagesSingle Source Shortest Path Unit-3Phani Kumar100% (1)
- 18Csc203J:Computer Organization and ArchitectureDocument56 pages18Csc203J:Computer Organization and ArchitectureSENTHIL RNo ratings yet
- Chapter 3 - Describing Logic Circuits - Dr. XuDocument86 pagesChapter 3 - Describing Logic Circuits - Dr. XuTimothy Ivan YosepNo ratings yet
- Digital System Module 4 PDFDocument52 pagesDigital System Module 4 PDFGeethanjali.pNo ratings yet
- Digital Logic ManualDocument14 pagesDigital Logic ManualJana Bhawana CampusNo ratings yet
- Prototype of A Fingerprint Based Licensing System For DrivingDocument6 pagesPrototype of A Fingerprint Based Licensing System For DrivingarshadshareefmdNo ratings yet
- "Virtual Instrumentation": Dr. Jovitha JeromeDocument41 pages"Virtual Instrumentation": Dr. Jovitha JeromeRavichandranNo ratings yet
- COMP1. L4. Selection Control StructureDocument10 pagesCOMP1. L4. Selection Control StructureJm SalvaniaNo ratings yet
- Experiment No 3Document20 pagesExperiment No 3Ako C SeanNo ratings yet
- Module 2Document46 pagesModule 2gokulNo ratings yet
- Single Phase Full Wave Voltage Multiplier PDFDocument3 pagesSingle Phase Full Wave Voltage Multiplier PDFJoshua Amiel javines0% (1)
- DECENA - IBE - Laboratory Exercise No 6Document16 pagesDECENA - IBE - Laboratory Exercise No 6John Rhey IbeNo ratings yet
- Time Domain Representation of Linear Time Invariant (LTI) SystemsDocument54 pagesTime Domain Representation of Linear Time Invariant (LTI) SystemsLai Yon PengNo ratings yet
- Memories and PLDsDocument47 pagesMemories and PLDsHimanshu Khanduri100% (1)
- Assignment Prelim2018Document7 pagesAssignment Prelim2018Joshua Refe50% (2)
- LogicDocument24 pagesLogicNeelam KapoorNo ratings yet
- AutocadDocument39 pagesAutocadAmexTesfayeKoraNo ratings yet
- Chapter 6 Registers & CountersDocument29 pagesChapter 6 Registers & CountersBenjamin Button100% (1)
- Convolution LectureDocument11 pagesConvolution Lecturespong1ertzNo ratings yet
- Experiment 1 Breadboard ImplementationDocument3 pagesExperiment 1 Breadboard ImplementationJeremy Lorenzo Teodoro VirataNo ratings yet
- Write A Pseudocode To Find The Largest of Two NumbersDocument36 pagesWrite A Pseudocode To Find The Largest of Two NumbersTriphine UwanyirigiraNo ratings yet
- Digital Electronics Circuits: Experiment: 9Document4 pagesDigital Electronics Circuits: Experiment: 9movabNo ratings yet
- Implementation of Logic Gate in PLC Using Ladder Programming LanguageDocument29 pagesImplementation of Logic Gate in PLC Using Ladder Programming LanguageAvinash RajNo ratings yet
- LIC+C Lab Manual-17 FinalDocument59 pagesLIC+C Lab Manual-17 FinalDhanush Gowda D TNo ratings yet
- DLD - Ch.1 Notes PDFDocument35 pagesDLD - Ch.1 Notes PDFAlradi Malak FadiNo ratings yet
- Two-Port Network: Chapter - ViDocument21 pagesTwo-Port Network: Chapter - ViKiranmai SrinivasuluNo ratings yet
- DLD LAB REPORT 3Document8 pagesDLD LAB REPORT 3HimelNo ratings yet
- Basic Digital Logic Design Notes PDFDocument138 pagesBasic Digital Logic Design Notes PDFnandams100% (1)
- Polar Plot, Nyquist PlotDocument19 pagesPolar Plot, Nyquist PlotSirshendu100% (1)
- JK Flip FlopDocument9 pagesJK Flip FlopNelson RajaNo ratings yet
- Unit-1 PPT-Concepts in VHDLDocument58 pagesUnit-1 PPT-Concepts in VHDLSUMASRI MNo ratings yet
- Pulse ModulationDocument20 pagesPulse ModulationmirapazcookeNo ratings yet
- Ece-Vii-dsp Algorithms & Architecture (10ec751) - AssignmentDocument9 pagesEce-Vii-dsp Algorithms & Architecture (10ec751) - AssignmentMuhammadMansoorGohar100% (1)
- Counter Circuits: ObjectivesDocument9 pagesCounter Circuits: ObjectivesRuhul Amin Khalil100% (1)
- Digital Logic Design For Boolen AlgebraDocument77 pagesDigital Logic Design For Boolen AlgebraJammalamadugu RavindranadhNo ratings yet
- OSI Unified View of Protocols and Services: Unit 01.02.02 CS 5220: Computer CommunicationsDocument14 pagesOSI Unified View of Protocols and Services: Unit 01.02.02 CS 5220: Computer CommunicationsAMRIT SAHNo ratings yet
- To Design An Adaptive Channel Equalizer Using MATLABDocument43 pagesTo Design An Adaptive Channel Equalizer Using MATLABAngel Pushpa100% (1)
- Unit-V Sequential Circuits & MemoriesDocument54 pagesUnit-V Sequential Circuits & Memories20H51A04K4-CHINTALAPATI MEGHANA B.Tech ECE (2020-24)No ratings yet
- Unit-V Sequential CircuitsDocument15 pagesUnit-V Sequential CircuitsDr A Pradeep Kumar asst.Prof(ECE)No ratings yet
- Class FlipflopsDocument44 pagesClass FlipflopsRanjith PNo ratings yet
- CSE 260 Digital Logic Design: Sequential Logic, RS Flip-Flop, D Flip-Flop, JK Flip-Flop, T Flip-Flop BRAC UniversityDocument27 pagesCSE 260 Digital Logic Design: Sequential Logic, RS Flip-Flop, D Flip-Flop, JK Flip-Flop, T Flip-Flop BRAC UniversityTECH BANGLADESHNo ratings yet
- Flip Flop and Types NotesDocument22 pagesFlip Flop and Types Notespmclasses28No ratings yet
- Latex/C2/Mathematical-Typesetting/English: Script - FormatDocument8 pagesLatex/C2/Mathematical-Typesetting/English: Script - Formatvidhya dsNo ratings yet
- Latex/C2/Equations/English: Visual Cue NarrationDocument6 pagesLatex/C2/Equations/English: Visual Cue Narrationvidhya dsNo ratings yet
- Latex/C2/Report-Writing/English: Author: Prof Kannan Moudgalya DateDocument7 pagesLatex/C2/Report-Writing/English: Author: Prof Kannan Moudgalya Datevidhya dsNo ratings yet
- Arduino Tutorial #1 - Getting Started and ConnectedDocument5 pagesArduino Tutorial #1 - Getting Started and Connectedvidhya dsNo ratings yet
- Nexys4™ PDM Filter Project: Revised February 3, 2014 This Manual Applies To The Nexys4 Rev. BDocument12 pagesNexys4™ PDM Filter Project: Revised February 3, 2014 This Manual Applies To The Nexys4 Rev. Bvidhya dsNo ratings yet
- 1.LaTeX On Windows Using TeXworksDocument8 pages1.LaTeX On Windows Using TeXworksvidhya dsNo ratings yet
- 3.letter WritingDocument2 pages3.letter Writingvidhya dsNo ratings yet
- Assignments Week02Document4 pagesAssignments Week02vidhya dsNo ratings yet
- Matlab PDFDocument1 pageMatlab PDFvidhya dsNo ratings yet
- Week 1: Assignment: Customization Cost That Is To Be Separately Borne by Every Customer."Document3 pagesWeek 1: Assignment: Customization Cost That Is To Be Separately Borne by Every Customer."vidhya dsNo ratings yet
- Slides Week8 PDFDocument46 pagesSlides Week8 PDFvidhya dsNo ratings yet
- Assignments Week08Document4 pagesAssignments Week08vidhya dsNo ratings yet
- Assignment 8 PDFDocument9 pagesAssignment 8 PDFvidhya dsNo ratings yet
- Ece Vii & ViiiDocument62 pagesEce Vii & Viiividhya dsNo ratings yet
- Lec 10Document36 pagesLec 10vidhya dsNo ratings yet
- Deep Learning Assignment0Document15 pagesDeep Learning Assignment0vidhya dsNo ratings yet
- 4.deep Learning Assignment4 Solution PDFDocument12 pages4.deep Learning Assignment4 Solution PDFvidhya ds100% (1)
- Refer Slide Time 00:17Document32 pagesRefer Slide Time 00:17vidhya dsNo ratings yet
- TRNG Handouts For Project PLNG & MGMT Wkshop 27 Nov 1dec 151 200Document50 pagesTRNG Handouts For Project PLNG & MGMT Wkshop 27 Nov 1dec 151 200vidhya dsNo ratings yet
- Assignment 8Document9 pagesAssignment 8vidhya dsNo ratings yet
- I F P G A (Fpga) : Ntroduction To Ield Rogrammable ATE Rrays SDocument13 pagesI F P G A (Fpga) : Ntroduction To Ield Rogrammable ATE Rrays Svidhya dsNo ratings yet
- gpdk090 DRM PDFDocument130 pagesgpdk090 DRM PDFVikas JainNo ratings yet
- Mindwave Arduino and LedsDocument6 pagesMindwave Arduino and LedsJordan RoweNo ratings yet
- 7680v2.3 (G52 76801XH) (H61MU E35 - H61M E33 - H61M E23 - H61M P33) EURODocument138 pages7680v2.3 (G52 76801XH) (H61MU E35 - H61M E33 - H61M E23 - H61M P33) EUROvulcanussNo ratings yet
- Camera Calculator - Copy Machine - Play StationDocument2 pagesCamera Calculator - Copy Machine - Play StationAndy Rilis100% (1)
- Load Cell Calibration AE301 StellaflexDocument2 pagesLoad Cell Calibration AE301 Stellaflexfjrr231294No ratings yet
- Malaysian Spectrum Licensing Framework - Stella Jeevamani NavaratnamDocument23 pagesMalaysian Spectrum Licensing Framework - Stella Jeevamani NavaratnamRazman RashidNo ratings yet
- JBL GTO1004 SMDocument27 pagesJBL GTO1004 SMautreraNo ratings yet
- Isc BD647: Silicon NPN Darlington Power TransistorDocument2 pagesIsc BD647: Silicon NPN Darlington Power Transistornanodocl5099No ratings yet
- Current Sharing Control of Parallel Bidirectional DC-DC Converter For Energy Storage Applications in Islanded MicrogridDocument6 pagesCurrent Sharing Control of Parallel Bidirectional DC-DC Converter For Energy Storage Applications in Islanded MicrogridariphineNo ratings yet
- What Is PLC?Document3 pagesWhat Is PLC?AnirbanSenNo ratings yet
- Kal Sys20 en 2V2 Rec 102-020401275Document8 pagesKal Sys20 en 2V2 Rec 102-020401275Amir IzzatNo ratings yet
- 10 LAGU InstallationDocument34 pages10 LAGU InstallationLavanya Mummadi50% (2)
- Classifications of ComputersDocument3 pagesClassifications of Computersjaimededios80% (5)
- KDC-319/4019 KDC-5020: Service ManualDocument19 pagesKDC-319/4019 KDC-5020: Service ManualDaniel Norberto DemariaNo ratings yet
- Manual Midas VeronaDocument52 pagesManual Midas VeronaJairoGRNo ratings yet
- 3G LTE Network Capacity ManagementDocument62 pages3G LTE Network Capacity Managementumair.the.1339No ratings yet
- TVS Clamping Protection Mode: Application NoteDocument17 pagesTVS Clamping Protection Mode: Application NoteMUHAMMED NASEEF MKNo ratings yet
- Question Paper Code:: Reg. No.Document3 pagesQuestion Paper Code:: Reg. No.karthick VijayanNo ratings yet
- CSE 3711 Lecture-No. 2 (Summer 2023) - Computer Networks and The InternetDocument101 pagesCSE 3711 Lecture-No. 2 (Summer 2023) - Computer Networks and The InternetsaifulNo ratings yet
- TK-760HG/762HG: Service Manual SupplementDocument41 pagesTK-760HG/762HG: Service Manual SupplementTiago TelesNo ratings yet
- Modulation Part 8 of 10Document4 pagesModulation Part 8 of 10nonotjenNo ratings yet
- Building A Future-Proof Data-Processing Solution With Intelligent IoT Gateways 1Document6 pagesBuilding A Future-Proof Data-Processing Solution With Intelligent IoT Gateways 1Adnan SalihbegovicNo ratings yet
- jψ jωt jφ jωt jωt jψ jφDocument12 pagesjψ jωt jφ jωt jωt jψ jφElectrical EngineersNo ratings yet
- 72 Pin SIMM ModulesDocument4 pages72 Pin SIMM Modulessubroto bosuNo ratings yet
- XMC1100 Boot Kit: Getting StartedDocument42 pagesXMC1100 Boot Kit: Getting StartedAsdasda AsdasdsadNo ratings yet
- Item 2.1 - 1SNA645001R0300-rb121-24vuc-interface-relay-r600-1c-o-a1-a2-24vac-dc-5-250vac-60ma-6aDocument3 pagesItem 2.1 - 1SNA645001R0300-rb121-24vuc-interface-relay-r600-1c-o-a1-a2-24vac-dc-5-250vac-60ma-6aTiennghia BuiNo ratings yet
- Zspi Rotc Unit: Introduction To Signal CommunicationDocument13 pagesZspi Rotc Unit: Introduction To Signal CommunicationLordje Divine EmotinNo ratings yet
- EE304 Poster TemplateDocument1 pageEE304 Poster TemplateKevin JoseNo ratings yet
- домофонDocument12 pagesдомофонСтоян МитевNo ratings yet
- Zte Mf628 Hsdpa Usb Modem Quick User GuideDocument9 pagesZte Mf628 Hsdpa Usb Modem Quick User GuidePooja PatelNo ratings yet