Download as ppt, pdf, or txt
You might also like
- Switching Power Supply Design: A Concise Practical HandbookFrom EverandSwitching Power Supply Design: A Concise Practical HandbookNo ratings yet
- Introduction to the simulation of power plants for EBSILON®Professional Version 15From EverandIntroduction to the simulation of power plants for EBSILON®Professional Version 15No ratings yet
- Process Control Case StudyDocument17 pagesProcess Control Case Studyhakita86100% (1)
- CPB 30004 - CHAPTER 1 - INTRO Sept 2014Document52 pagesCPB 30004 - CHAPTER 1 - INTRO Sept 2014Ashwin MNo ratings yet
- Isothermal Reactor Design - With Audio - Part 1&2Document43 pagesIsothermal Reactor Design - With Audio - Part 1&2hakita86No ratings yet
- Right+to+Travel Massive CitesDocument21 pagesRight+to+Travel Massive CitesMista MurphyNo ratings yet
- Manual of Practice For PECEDocument40 pagesManual of Practice For PECEEdward RodriguezNo ratings yet
- ControllersDocument32 pagesControllersEric KamauNo ratings yet
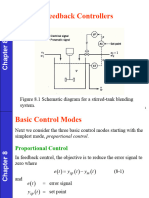
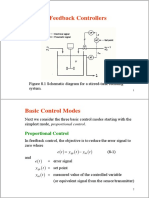
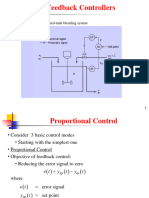
- Feedback Controllers: Figure 8.1 Schematic Diagram For A Stirred-Tank Blending SystemDocument42 pagesFeedback Controllers: Figure 8.1 Schematic Diagram For A Stirred-Tank Blending SystemJoy RoyNo ratings yet
- Week 2Document13 pagesWeek 2Abdinasir AliNo ratings yet
- Feedback Controllers: Proportional ControlDocument14 pagesFeedback Controllers: Proportional Control李承家No ratings yet
- ControllersDocument41 pagesControllersAthiradh R NNo ratings yet
- Chapter 8Document31 pagesChapter 8fosterNo ratings yet
- Chapter 8 Feedback ControllersDocument36 pagesChapter 8 Feedback Controllersqwerty 3340No ratings yet
- Week 10-Feedback ControlDocument34 pagesWeek 10-Feedback ControlMohd Aizad100% (1)
- Week 9Document21 pagesWeek 9candan.erkenNo ratings yet
- Chapter 8Document37 pagesChapter 8Ekbal 6MNo ratings yet
- Feedback Controller: Proportional, Integral, Derivative (PID)Document34 pagesFeedback Controller: Proportional, Integral, Derivative (PID)Ereen100% (1)
- Process Dynamics and Control: Chapter 8 LecturesDocument33 pagesProcess Dynamics and Control: Chapter 8 LecturesMuhaiminul IslamNo ratings yet
- Chapter 8 - Feedback ControllerDocument35 pagesChapter 8 - Feedback ControllerFakhrulShahrilEzanieNo ratings yet
- PDC Chapter 8Document49 pagesPDC Chapter 8satya sagarNo ratings yet
- Feedback Controllers: Figure. Schematic Diagram For A Stirred-Tank Blending SystemDocument24 pagesFeedback Controllers: Figure. Schematic Diagram For A Stirred-Tank Blending SystemRama ChilpuriNo ratings yet
- Process Chapter 3Document35 pagesProcess Chapter 3Estifanos FitsumNo ratings yet
- Feedback Controllers: Figure 8.1 Schematic Diagram For A Stirred-Tank Blending SystemDocument18 pagesFeedback Controllers: Figure 8.1 Schematic Diagram For A Stirred-Tank Blending Systeml7aniNo ratings yet
- Controller PrincipleDocument24 pagesController PrinciplePortia ShilengeNo ratings yet
- PID ControllerDocument22 pagesPID ControllerannonymousNo ratings yet
- Week 12 - Control SystemDocument30 pagesWeek 12 - Control SystemAzizan Anuar100% (1)
- 2 Automatic ControllersDocument26 pages2 Automatic ControllersCupa no DensetsuNo ratings yet
- KMM411E - Lesson7a - Feedback Controllers - 14nov2022Document56 pagesKMM411E - Lesson7a - Feedback Controllers - 14nov2022hairen jegerNo ratings yet
- Lesson 1: Introduction To Control Systems TechnologyDocument28 pagesLesson 1: Introduction To Control Systems TechnologyJiss Mohan KNo ratings yet
- Digital Pid Controller 175Document6 pagesDigital Pid Controller 175andr14272No ratings yet
- Control of Continuous Process: Lecturer: Dr. Shallon StubbsDocument32 pagesControl of Continuous Process: Lecturer: Dr. Shallon StubbsLuther King Ferguson100% (1)
- Marlin Ch08Document27 pagesMarlin Ch08tyamamoto5959No ratings yet
- University of Palestine: Electrical Machine & Control SystemsDocument26 pagesUniversity of Palestine: Electrical Machine & Control SystemsHatem DheerNo ratings yet
- Pic FBDocument65 pagesPic FBSamaid AbdullahNo ratings yet
- Pid Control ch8 PDFDocument22 pagesPid Control ch8 PDFGholamreza IlkhaniNo ratings yet
- PID Intech-Pid Control Theory PDFDocument18 pagesPID Intech-Pid Control Theory PDFDragoș TomaNo ratings yet
- Intech-Pid Control Theory PDFDocument17 pagesIntech-Pid Control Theory PDFRahim Ali QamarNo ratings yet
- Control StrategyDocument44 pagesControl StrategyAyunie FazlinNo ratings yet
- Process Control - Chapter 7JUDocument42 pagesProcess Control - Chapter 7JUY MuNo ratings yet
- Control SystemDocument48 pagesControl SystemOlawale John AdeotiNo ratings yet
- Proportional Integral AND Derivative ControllerDocument16 pagesProportional Integral AND Derivative ControllerAzhar AliNo ratings yet
- P, I, D, PI, PD, and PID ControlDocument14 pagesP, I, D, PI, PD, and PID ControlArnav KothiyalNo ratings yet
- Transfer FunctionDocument62 pagesTransfer FunctionTam PhamNo ratings yet
- Pid Controller Tuning: S.no Name of The ChapterDocument35 pagesPid Controller Tuning: S.no Name of The ChapterAmit TripathiNo ratings yet
- PID Controller - DC MotorDocument6 pagesPID Controller - DC MotorKrutika GiteNo ratings yet
- Proportional Integral Derivative PID ControlsDocument13 pagesProportional Integral Derivative PID Controlsapi-376515075% (4)
- Chapter Two: Controller PrinciplesDocument34 pagesChapter Two: Controller PrinciplesBekaluNo ratings yet
- Unit 3Document11 pagesUnit 3mayuraher9511No ratings yet
- 1.2 Automatic Load Frequency Control: Department of Electrical Engineering, S.I.E.T, DhenkanalDocument6 pages1.2 Automatic Load Frequency Control: Department of Electrical Engineering, S.I.E.T, DhenkanalManikant MadhusudanNo ratings yet
- Assistant Professor Dr. Khalaf S Gaeid: Electrical Engineering Department/Tikrit UniversityDocument39 pagesAssistant Professor Dr. Khalaf S Gaeid: Electrical Engineering Department/Tikrit Universityaditee saxenaaNo ratings yet
- 5 PID ControlDocument45 pages5 PID ControlaldidwilaksitaNo ratings yet
- Control SystemsDocument14 pagesControl SystemshenryNo ratings yet
- PID Control TheoryDocument17 pagesPID Control TheoryManuel Santos MNo ratings yet
- Hitachi Inverter PID Control Users' GuideDocument16 pagesHitachi Inverter PID Control Users' GuideMirinhaeThiago RosárioNo ratings yet
- 9.2 - P, I, D, PI, PD, and PID Control - Engineering LibreTextsDocument9 pages9.2 - P, I, D, PI, PD, and PID Control - Engineering LibreTextsChandrasekar ElankannanNo ratings yet
- Control Systems Overview Professor GopalankrishnaDocument23 pagesControl Systems Overview Professor GopalankrishnaJameNo ratings yet
- 10 Vertical Take Off and Landing ControlDocument27 pages10 Vertical Take Off and Landing ControlkalyanNo ratings yet
- InTech-Pid Control TheoryDocument17 pagesInTech-Pid Control TheoryAbner BezerraNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Multi-Distribution Activation Energy Model On Slow Pyrolysis of Cellulose and Lignin in TGADSCDocument8 pagesMulti-Distribution Activation Energy Model On Slow Pyrolysis of Cellulose and Lignin in TGADSChakita86No ratings yet
- Removal of Microplastics From The Environment. ADocument23 pagesRemoval of Microplastics From The Environment. Ahakita86No ratings yet
- DF (Linear Driving Force) and FD (Fickian Diffusion)Document32 pagesDF (Linear Driving Force) and FD (Fickian Diffusion)hakita86No ratings yet
- Aspen For Chem RXN PART 2Document50 pagesAspen For Chem RXN PART 2hakita86No ratings yet
- Energy Analysis of Closed and Control Volume SystemDocument74 pagesEnergy Analysis of Closed and Control Volume Systemhakita86No ratings yet
- Adsorption Isotherm and Kinetic Study of Gas-Solid System of Formaldehyde On Oil Palm Mesocarp Bio-Charpyrolysis EffectDocument14 pagesAdsorption Isotherm and Kinetic Study of Gas-Solid System of Formaldehyde On Oil Palm Mesocarp Bio-Charpyrolysis Effecthakita86No ratings yet
- Valorization of Biomass Waste To Engineered Activated Biochar by Microwave Pyrolysis Progress, Challenges, and Future DirectionsDocument20 pagesValorization of Biomass Waste To Engineered Activated Biochar by Microwave Pyrolysis Progress, Challenges, and Future Directionshakita86No ratings yet
- Separation Technique - Pharm Eng IDocument43 pagesSeparation Technique - Pharm Eng Ihakita86No ratings yet
- Single-Use Surgical Face Masks, As A Potential Source of MicroplasticsDocument5 pagesSingle-Use Surgical Face Masks, As A Potential Source of Microplasticshakita86No ratings yet
- Overview of Control System DesignDocument39 pagesOverview of Control System Designhakita86No ratings yet
- ERT 321 - Process Control & Dynamics Feedforward & Ratio ControlDocument23 pagesERT 321 - Process Control & Dynamics Feedforward & Ratio Controlhakita86No ratings yet
- CHAPTER 12: Controller Design, Tuning, & Troubleshooting: Anis Atikah Ahmad Anisatikah@unimap - Edu.myDocument65 pagesCHAPTER 12: Controller Design, Tuning, & Troubleshooting: Anis Atikah Ahmad Anisatikah@unimap - Edu.myhakita86No ratings yet
- CHAPTER 11: Dynamic Behaviour & Stability of Closed-Loop Control SystemsDocument69 pagesCHAPTER 11: Dynamic Behaviour & Stability of Closed-Loop Control Systemshakita86No ratings yet
- Dynamic Response Characteristics of More Complicated ProcessesDocument38 pagesDynamic Response Characteristics of More Complicated Processeshakita86No ratings yet
- ERT 321 Process Control & DynamicsDocument49 pagesERT 321 Process Control & Dynamicshakita86No ratings yet
- Steady-Flow Systems & Engineering DevicesDocument74 pagesSteady-Flow Systems & Engineering Deviceshakita86No ratings yet
- The Second Law of ThermodynamicsDocument36 pagesThe Second Law of Thermodynamicshakita86No ratings yet
- Robust Design - Taguchi Philosophy: Anis Atikah AhmadDocument17 pagesRobust Design - Taguchi Philosophy: Anis Atikah Ahmadhakita86No ratings yet
- OrthogonalDesign IbDocument4 pagesOrthogonalDesign Ibhakita86No ratings yet
- ACN Micro Project-1Document23 pagesACN Micro Project-1ashutosh dudhaneNo ratings yet
- S13 PostIndependenceIndiaPart 1Document111 pagesS13 PostIndependenceIndiaPart 1Bhupendra PatidarNo ratings yet
- Oral Questions For CSS NC II 2Document5 pagesOral Questions For CSS NC II 2Rhix JohnNo ratings yet
- Rakes vs. Atlantic GulfDocument2 pagesRakes vs. Atlantic GulfPia SarconNo ratings yet
- Inverter Mitsubishi - Practical CourseDocument217 pagesInverter Mitsubishi - Practical Coursealbeerto86% (7)
- The Connection Between Strategy and Structure: Published by Asian Society of Business and Commerce ResearchDocument12 pagesThe Connection Between Strategy and Structure: Published by Asian Society of Business and Commerce ResearchPranav KumarNo ratings yet
- Global SecurityDocument1 pageGlobal SecurityNeil MNNo ratings yet
- Organization & Management: First Semester - First Quarter Week - 4Document4 pagesOrganization & Management: First Semester - First Quarter Week - 4Mira Joey AradoNo ratings yet
- SPD Module 1Document15 pagesSPD Module 1Daniel ReyesNo ratings yet
- Energy AssessmentDocument2 pagesEnergy Assessmentapi-342299656No ratings yet
- Servicemanual Panasonic kv-s2087 s1Document5 pagesServicemanual Panasonic kv-s2087 s1Ralf KöhlerNo ratings yet
- 02 - Property Tables and ChartsDocument2 pages02 - Property Tables and ChartsjhamilcarNo ratings yet
- INNCOM E7w USER GUIDE - INSTALLATION INSTRUCTIONSDocument83 pagesINNCOM E7w USER GUIDE - INSTALLATION INSTRUCTIONSGustavo angel lopez gomezNo ratings yet
- 2GCS303011A0031-Capacitor Banks - Quick Selection GuideDocument4 pages2GCS303011A0031-Capacitor Banks - Quick Selection Guideantera88No ratings yet
- Thermodynamic ProjectDocument8 pagesThermodynamic ProjectNadiyaNo ratings yet
- Resume Stephen SouthernDocument2 pagesResume Stephen SouthernstevesouthernNo ratings yet
- Rural Poultry Management GuideDocument7 pagesRural Poultry Management Guideసాయిమహేష్రెడ్డిఆవులNo ratings yet
- Example For Decision Making CriteriaDocument5 pagesExample For Decision Making CriteriaArly Kurt TorresNo ratings yet
- Struktur Kelas 10 Ipa 3Document17 pagesStruktur Kelas 10 Ipa 3Okvie AjaNo ratings yet
- Interpreting Qualitative DataDocument13 pagesInterpreting Qualitative DataHiranda WildayaniNo ratings yet
- Social Responsibility Theory FixDocument8 pagesSocial Responsibility Theory Fixsyifa fauziahNo ratings yet
- City Limits Magazine, July/August 2005 IssueDocument40 pagesCity Limits Magazine, July/August 2005 IssueCity Limits (New York)No ratings yet
- Nursing Excellence StandardsDocument58 pagesNursing Excellence StandardsJyoti100% (1)
- ReportDocument1 pageReportChinnu YadavNo ratings yet
- Security Information and Event Management: Radboud University NijmegenDocument75 pagesSecurity Information and Event Management: Radboud University NijmegenproftechitspecialistNo ratings yet
- Pricing Mechanisms - Paul Hastings - PWCDocument8 pagesPricing Mechanisms - Paul Hastings - PWCcontactpulkitagarwalNo ratings yet
- DIDIDocument3 pagesDIDIRamon GarciaNo ratings yet
- Boss BD-2 ModsDocument1 pageBoss BD-2 ModsDjRafael TsunamiNo ratings yet