
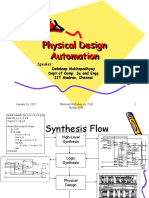
Physical Design Automation
Physical Design Automation
You might also like
- Allen Heath Ag8700 1 Qu16 PsuDocument7 pagesAllen Heath Ag8700 1 Qu16 PsuSugeng HariadiNo ratings yet
- Chapter6 Ex SolDocument26 pagesChapter6 Ex SolShivani YadavNo ratings yet
- Make Money With ShareCash PDFDocument5 pagesMake Money With ShareCash PDFDeyvison Rabelo da SilvaNo ratings yet
- Science7 - q1 - Mod1 - Scientific Ways of Acquiring Knowledge and Solving Problesm - FINAL08032020Document25 pagesScience7 - q1 - Mod1 - Scientific Ways of Acquiring Knowledge and Solving Problesm - FINAL08032020ruff81% (70)
- Analog LayoutDocument116 pagesAnalog LayoutvinayNo ratings yet
- Physical Design AutomationDocument116 pagesPhysical Design AutomationMaheshNo ratings yet
- Lecture3 PartitionDocument24 pagesLecture3 Partitionapi-3834272No ratings yet
- Course:-Cad For Vlsi Partitioning Algorithm (K-L Algorithm and F-M Algorithm)Document9 pagesCourse:-Cad For Vlsi Partitioning Algorithm (K-L Algorithm and F-M Algorithm)Abrolsahil333No ratings yet
- Lec 06Document78 pagesLec 06prakashNo ratings yet
- 07 PartitioningDocument10 pages07 PartitioningBruhath KotamrajuNo ratings yet
- Image Segmentation Graph CutDocument35 pagesImage Segmentation Graph CutSubrat KabiNo ratings yet
- Digital Electronics (K-Wiki - Combinational Circuits)Document36 pagesDigital Electronics (K-Wiki - Combinational Circuits)SUNOBHAINo ratings yet
- EEE 211 Lecture 9Document23 pagesEEE 211 Lecture 9fi7732803No ratings yet
- Chapter 2 - Combinational Logic Circuits: Logic and Computer Design FundamentalsDocument54 pagesChapter 2 - Combinational Logic Circuits: Logic and Computer Design FundamentalsboymatterNo ratings yet
- DP - Intro With LinksDocument10 pagesDP - Intro With LinksBasisoneooneNo ratings yet
- Eesam Compmemreq v2Document57 pagesEesam Compmemreq v2yipeh50050No ratings yet
- Computer Graphics: Line & Circle DrawingDocument29 pagesComputer Graphics: Line & Circle DrawingRajasekharReddyGajulapaalliNo ratings yet
- UNIT 1 PPTDocument183 pagesUNIT 1 PPTsuganya004No ratings yet
- Lecture9 Placement1Document68 pagesLecture9 Placement1api-3834272100% (1)
- Digital Logic Design Chapter 2: Circuit Optimization 2 Semester BS ElectronicsDocument54 pagesDigital Logic Design Chapter 2: Circuit Optimization 2 Semester BS Electronicsazhar haiderNo ratings yet
- Lecture 4: Non-Linear Filters & Image Compression: B14 Image Analysis Michaelmas 2014 A. ZissermanDocument54 pagesLecture 4: Non-Linear Filters & Image Compression: B14 Image Analysis Michaelmas 2014 A. ZissermanybNo ratings yet
- Sparse Optimization Lecture: Basic Sparse Optimization ModelsDocument33 pagesSparse Optimization Lecture: Basic Sparse Optimization ModelsCatalin TomaNo ratings yet
- Test-3-Egtronics Devices PDFDocument11 pagesTest-3-Egtronics Devices PDFSumit KumarNo ratings yet
- Sampling and Pulse Code ModulationDocument14 pagesSampling and Pulse Code Modulationmysterious_samaNo ratings yet
- Dynamic Programming: Department of CSE JNTUA College of Engg., KalikiriDocument66 pagesDynamic Programming: Department of CSE JNTUA College of Engg., KalikiriMaaz ChauhannNo ratings yet
- cs559 22Document23 pagescs559 22Đào Thanh PhongNo ratings yet
- Conic Programming in GAMSDocument36 pagesConic Programming in GAMSamirehosseinNo ratings yet
- Machine Learning: BackpropagationDocument24 pagesMachine Learning: BackpropagationArdiansyah Mochamad NugrahaNo ratings yet
- Ece Exam 1Document13 pagesEce Exam 1srisonyNo ratings yet
- On The Construction of Zero-Deficiency Parallel Prefix Circuits With Minimum DepthDocument23 pagesOn The Construction of Zero-Deficiency Parallel Prefix Circuits With Minimum DepthAnonymous xeXFczNo ratings yet
- 02 Practice Sheet Digital Electronics Iswar Sir Upendra Pal 2 1Document8 pages02 Practice Sheet Digital Electronics Iswar Sir Upendra Pal 2 1patidar sachinNo ratings yet
- DLD Lab 9Document6 pagesDLD Lab 9Muhammad RehanNo ratings yet
- Lecture Week 2B 2018 PDFDocument87 pagesLecture Week 2B 2018 PDFalfalfa manNo ratings yet
- Application of Improved PSO For Optimal Design of CMOS Two-Stage Op-Amp Using Nulling Resistor Compensation CircuitDocument6 pagesApplication of Improved PSO For Optimal Design of CMOS Two-Stage Op-Amp Using Nulling Resistor Compensation CircuitmohsenparsauniNo ratings yet
- DTM Ssip PDFDocument45 pagesDTM Ssip PDFYaseminNo ratings yet
- 351CS63 - AK - Computer Graphics (Weekend)Document17 pages351CS63 - AK - Computer Graphics (Weekend)Felix MdazepaNo ratings yet
- Cdma PDFDocument20 pagesCdma PDFUmair HameedNo ratings yet
- Lecture 2 - LP Basics1Document33 pagesLecture 2 - LP Basics1TarekYehiaNo ratings yet
- Lab 9 (Group 4) - 1Document11 pagesLab 9 (Group 4) - 1MUHAMMAD HUZAIFANo ratings yet
- Minor Test-2-Phase-1-C-13-LEADER-MAINSDocument14 pagesMinor Test-2-Phase-1-C-13-LEADER-MAINSKala BihariNo ratings yet
- MCC - TRB - Eee - 2021 - Answer KeyDocument39 pagesMCC - TRB - Eee - 2021 - Answer KeysabilashNo ratings yet
- Control SystemDocument26 pagesControl SystemshubhamNo ratings yet
- Basic ConceptsDocument14 pagesBasic ConceptsFareed NaouriNo ratings yet
- Convolutional Neural Network: Sudeshna Sarkar 22/2/17, 23/2/17, 24/2/17Document120 pagesConvolutional Neural Network: Sudeshna Sarkar 22/2/17, 23/2/17, 24/2/17Sreenivasareddy DevarapalliNo ratings yet
- Choosing of Dimensions enDocument7 pagesChoosing of Dimensions enCarolina SveatiiNo ratings yet
- Digital 4Document38 pagesDigital 4usaravanakumarNo ratings yet
- CS252 Graduate Computer Architecture Error Correction Codes April 20, 2011Document26 pagesCS252 Graduate Computer Architecture Error Correction Codes April 20, 2011Sumit BasuNo ratings yet
- EC381 Lecture11 PDFDocument19 pagesEC381 Lecture11 PDFCorazon corazonNo ratings yet
- Lecture1 Chapter3 - Introduction To Map Method, Function Simplification Using Three and Four-Variable MapDocument31 pagesLecture1 Chapter3 - Introduction To Map Method, Function Simplification Using Three and Four-Variable MapAyesha HussainNo ratings yet
- 5-SpatialFiltering 2Document74 pages5-SpatialFiltering 2pham tamNo ratings yet
- Chapter2 Algorithmic ParadigmsDocument55 pagesChapter2 Algorithmic Paradigmsvunguyen0377242No ratings yet
- DSP Design - Lecture 6: UnfoldingDocument44 pagesDSP Design - Lecture 6: UnfoldingAbdul JabbarNo ratings yet
- Application of Derivatives (Bounce Back)Document156 pagesApplication of Derivatives (Bounce Back)Asty OfficialNo ratings yet
- 3712CSD-KST Content AvesisDocument18 pages3712CSD-KST Content Avesis.0No ratings yet
- Artificial Intelligence: Foundations & Applications: Prof. Partha P. Chakrabarti & Arijit MondalDocument40 pagesArtificial Intelligence: Foundations & Applications: Prof. Partha P. Chakrabarti & Arijit MondalAnil YogiNo ratings yet
- Graphical Method PDFDocument11 pagesGraphical Method PDFShivanand ArwatNo ratings yet
- ORF 307 Optimization Practice Second MidtermDocument6 pagesORF 307 Optimization Practice Second MidtermAdam ChangNo ratings yet
- A Combined Genetic Adaptive Search (Geneas) For Engineering DesignDocument34 pagesA Combined Genetic Adaptive Search (Geneas) For Engineering Designpaskorn100% (2)
- Dr. Sampad Ghosh: Modular Combinational Circuit DesignDocument16 pagesDr. Sampad Ghosh: Modular Combinational Circuit DesignMortuzaNo ratings yet
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionFrom EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionNo ratings yet
- Iare Vlsi Notes 2Document247 pagesIare Vlsi Notes 2ijalab1No ratings yet
- Redhawk Linux User'S Guide: 0898004-300 April 2003Document233 pagesRedhawk Linux User'S Guide: 0898004-300 April 2003ijalab1No ratings yet
- Place & Route Tutorial #1: I. SetupDocument13 pagesPlace & Route Tutorial #1: I. Setupijalab1No ratings yet
- I. Setup For Cadence InnovusDocument20 pagesI. Setup For Cadence Innovusijalab1No ratings yet
- Tutorial InnovusDocument47 pagesTutorial Innovusijalab1No ratings yet
- Lecture 02 HDL PDFDocument216 pagesLecture 02 HDL PDFijalab1No ratings yet
- Asic/Fpga C Asic/Fpga C Chip Design Chip Design: Power Di Power Di Ssipation SsipationDocument51 pagesAsic/Fpga C Asic/Fpga C Chip Design Chip Design: Power Di Power Di Ssipation Ssipationijalab1No ratings yet
- 6 Prime TimeDocument42 pages6 Prime Timeijalab1No ratings yet
- 590-Bypass Hardware Breakpoint ProtectionDocument24 pages590-Bypass Hardware Breakpoint Protectionapi-3754605No ratings yet
- CV 53001 IntroductionDocument49 pagesCV 53001 IntroductionVictor OmotoriogunNo ratings yet
- Quick Guide To MoqDocument12 pagesQuick Guide To MoqZona Educación Especial ZacapaoaxtlaNo ratings yet
- YÖKDİL Fen Cloze Test Soru TipiDocument6 pagesYÖKDİL Fen Cloze Test Soru TipiCengizNo ratings yet
- English G 7 Teacher's Guide (1) (2) .PDF 1695409486637Document44 pagesEnglish G 7 Teacher's Guide (1) (2) .PDF 1695409486637nurhusenebrahim10No ratings yet
- Dost ScholarshipDocument5 pagesDost ScholarshipFue NoirNo ratings yet
- Rocketman AccordiDocument1 pageRocketman AccordiSaverio Ombracorta PorcariNo ratings yet
- Ex. Thread &tapDocument11 pagesEx. Thread &tapSebastianNo ratings yet
- Bi PemahamanDocument11 pagesBi PemahamanAzam SyahiraNo ratings yet
- November 2011 Main ExamDocument7 pagesNovember 2011 Main ExamMduduzi Magiva MahlanguNo ratings yet
- OUTPUT No 3Document6 pagesOUTPUT No 3Princes Gado LuarcaNo ratings yet
- Pitbull Essay 1Document8 pagesPitbull Essay 1api-386452578No ratings yet
- Hydraulic Release ShackleDocument3 pagesHydraulic Release ShackleedriceNo ratings yet
- 9 TH Class Cbse Social Science GeographyDocument63 pages9 TH Class Cbse Social Science GeographyAswin RemesanNo ratings yet
- Che Module 3aDocument127 pagesChe Module 3aPerter K MNo ratings yet
- High Temperature-Grease-pds-EngDocument3 pagesHigh Temperature-Grease-pds-Engdavide comuzziNo ratings yet
- Final Report 2.0Document22 pagesFinal Report 2.0kunalmpatekar10No ratings yet
- The University of Melbourne Mail - Your Enrolment Has Been CancelledDocument3 pagesThe University of Melbourne Mail - Your Enrolment Has Been CancelledFinn HurleyNo ratings yet
- The Effect of Iron in Al-Si Casting Alloys: October 2004Document11 pagesThe Effect of Iron in Al-Si Casting Alloys: October 2004Jothi ManiNo ratings yet
- (Cultural Memory in The Present) Hent de Vries (Editor) - Samuel Weber (Editor) - Religion and Media-Stanford University Press (2001)Document670 pages(Cultural Memory in The Present) Hent de Vries (Editor) - Samuel Weber (Editor) - Religion and Media-Stanford University Press (2001)Mauricio BaezNo ratings yet
- ETHYLENEAMINE E-100 (E-100) : Technical BulletinDocument2 pagesETHYLENEAMINE E-100 (E-100) : Technical BulletinRAFAEL MIERESNo ratings yet
- Critical Assembly of Fission MaterialsDocument25 pagesCritical Assembly of Fission Materialsgreasy LemonsNo ratings yet
- Process Safety Management OutlineDocument24 pagesProcess Safety Management Outlineismailines100% (1)
- SSC CGL Tier-I Practice Set 4Document10 pagesSSC CGL Tier-I Practice Set 4Vothi ThuyhanhNo ratings yet
- Respiration in Plants Class 11 QuestionsDocument3 pagesRespiration in Plants Class 11 QuestionsAshok KumarNo ratings yet
- CPA Canada Standard Practices For Investigative and Forensic Accounting EngagementsDocument27 pagesCPA Canada Standard Practices For Investigative and Forensic Accounting EngagementsJayNo ratings yet
- Acct Statement - XX8434 - 07092022Document7 pagesAcct Statement - XX8434 - 07092022Suhail KhanNo ratings yet





























































































Download as ppt, pdf, or txt
You might also like
- Allen Heath Ag8700 1 Qu16 PsuDocument7 pagesAllen Heath Ag8700 1 Qu16 PsuSugeng HariadiNo ratings yet
- Chapter6 Ex SolDocument26 pagesChapter6 Ex SolShivani YadavNo ratings yet
- Make Money With ShareCash PDFDocument5 pagesMake Money With ShareCash PDFDeyvison Rabelo da SilvaNo ratings yet
- Science7 - q1 - Mod1 - Scientific Ways of Acquiring Knowledge and Solving Problesm - FINAL08032020Document25 pagesScience7 - q1 - Mod1 - Scientific Ways of Acquiring Knowledge and Solving Problesm - FINAL08032020ruff81% (70)
- Analog LayoutDocument116 pagesAnalog LayoutvinayNo ratings yet
- Physical Design AutomationDocument116 pagesPhysical Design AutomationMaheshNo ratings yet
- Lecture3 PartitionDocument24 pagesLecture3 Partitionapi-3834272No ratings yet
- Course:-Cad For Vlsi Partitioning Algorithm (K-L Algorithm and F-M Algorithm)Document9 pagesCourse:-Cad For Vlsi Partitioning Algorithm (K-L Algorithm and F-M Algorithm)Abrolsahil333No ratings yet
- Lec 06Document78 pagesLec 06prakashNo ratings yet
- 07 PartitioningDocument10 pages07 PartitioningBruhath KotamrajuNo ratings yet
- Image Segmentation Graph CutDocument35 pagesImage Segmentation Graph CutSubrat KabiNo ratings yet
- Digital Electronics (K-Wiki - Combinational Circuits)Document36 pagesDigital Electronics (K-Wiki - Combinational Circuits)SUNOBHAINo ratings yet
- EEE 211 Lecture 9Document23 pagesEEE 211 Lecture 9fi7732803No ratings yet
- Chapter 2 - Combinational Logic Circuits: Logic and Computer Design FundamentalsDocument54 pagesChapter 2 - Combinational Logic Circuits: Logic and Computer Design FundamentalsboymatterNo ratings yet
- DP - Intro With LinksDocument10 pagesDP - Intro With LinksBasisoneooneNo ratings yet
- Eesam Compmemreq v2Document57 pagesEesam Compmemreq v2yipeh50050No ratings yet
- Computer Graphics: Line & Circle DrawingDocument29 pagesComputer Graphics: Line & Circle DrawingRajasekharReddyGajulapaalliNo ratings yet
- UNIT 1 PPTDocument183 pagesUNIT 1 PPTsuganya004No ratings yet
- Lecture9 Placement1Document68 pagesLecture9 Placement1api-3834272100% (1)
- Digital Logic Design Chapter 2: Circuit Optimization 2 Semester BS ElectronicsDocument54 pagesDigital Logic Design Chapter 2: Circuit Optimization 2 Semester BS Electronicsazhar haiderNo ratings yet
- Lecture 4: Non-Linear Filters & Image Compression: B14 Image Analysis Michaelmas 2014 A. ZissermanDocument54 pagesLecture 4: Non-Linear Filters & Image Compression: B14 Image Analysis Michaelmas 2014 A. ZissermanybNo ratings yet
- Sparse Optimization Lecture: Basic Sparse Optimization ModelsDocument33 pagesSparse Optimization Lecture: Basic Sparse Optimization ModelsCatalin TomaNo ratings yet
- Test-3-Egtronics Devices PDFDocument11 pagesTest-3-Egtronics Devices PDFSumit KumarNo ratings yet
- Sampling and Pulse Code ModulationDocument14 pagesSampling and Pulse Code Modulationmysterious_samaNo ratings yet
- Dynamic Programming: Department of CSE JNTUA College of Engg., KalikiriDocument66 pagesDynamic Programming: Department of CSE JNTUA College of Engg., KalikiriMaaz ChauhannNo ratings yet
- cs559 22Document23 pagescs559 22Đào Thanh PhongNo ratings yet
- Conic Programming in GAMSDocument36 pagesConic Programming in GAMSamirehosseinNo ratings yet
- Machine Learning: BackpropagationDocument24 pagesMachine Learning: BackpropagationArdiansyah Mochamad NugrahaNo ratings yet
- Ece Exam 1Document13 pagesEce Exam 1srisonyNo ratings yet
- On The Construction of Zero-Deficiency Parallel Prefix Circuits With Minimum DepthDocument23 pagesOn The Construction of Zero-Deficiency Parallel Prefix Circuits With Minimum DepthAnonymous xeXFczNo ratings yet
- 02 Practice Sheet Digital Electronics Iswar Sir Upendra Pal 2 1Document8 pages02 Practice Sheet Digital Electronics Iswar Sir Upendra Pal 2 1patidar sachinNo ratings yet
- DLD Lab 9Document6 pagesDLD Lab 9Muhammad RehanNo ratings yet
- Lecture Week 2B 2018 PDFDocument87 pagesLecture Week 2B 2018 PDFalfalfa manNo ratings yet
- Application of Improved PSO For Optimal Design of CMOS Two-Stage Op-Amp Using Nulling Resistor Compensation CircuitDocument6 pagesApplication of Improved PSO For Optimal Design of CMOS Two-Stage Op-Amp Using Nulling Resistor Compensation CircuitmohsenparsauniNo ratings yet
- DTM Ssip PDFDocument45 pagesDTM Ssip PDFYaseminNo ratings yet
- 351CS63 - AK - Computer Graphics (Weekend)Document17 pages351CS63 - AK - Computer Graphics (Weekend)Felix MdazepaNo ratings yet
- Cdma PDFDocument20 pagesCdma PDFUmair HameedNo ratings yet
- Lecture 2 - LP Basics1Document33 pagesLecture 2 - LP Basics1TarekYehiaNo ratings yet
- Lab 9 (Group 4) - 1Document11 pagesLab 9 (Group 4) - 1MUHAMMAD HUZAIFANo ratings yet
- Minor Test-2-Phase-1-C-13-LEADER-MAINSDocument14 pagesMinor Test-2-Phase-1-C-13-LEADER-MAINSKala BihariNo ratings yet
- MCC - TRB - Eee - 2021 - Answer KeyDocument39 pagesMCC - TRB - Eee - 2021 - Answer KeysabilashNo ratings yet
- Control SystemDocument26 pagesControl SystemshubhamNo ratings yet
- Basic ConceptsDocument14 pagesBasic ConceptsFareed NaouriNo ratings yet
- Convolutional Neural Network: Sudeshna Sarkar 22/2/17, 23/2/17, 24/2/17Document120 pagesConvolutional Neural Network: Sudeshna Sarkar 22/2/17, 23/2/17, 24/2/17Sreenivasareddy DevarapalliNo ratings yet
- Choosing of Dimensions enDocument7 pagesChoosing of Dimensions enCarolina SveatiiNo ratings yet
- Digital 4Document38 pagesDigital 4usaravanakumarNo ratings yet
- CS252 Graduate Computer Architecture Error Correction Codes April 20, 2011Document26 pagesCS252 Graduate Computer Architecture Error Correction Codes April 20, 2011Sumit BasuNo ratings yet
- EC381 Lecture11 PDFDocument19 pagesEC381 Lecture11 PDFCorazon corazonNo ratings yet
- Lecture1 Chapter3 - Introduction To Map Method, Function Simplification Using Three and Four-Variable MapDocument31 pagesLecture1 Chapter3 - Introduction To Map Method, Function Simplification Using Three and Four-Variable MapAyesha HussainNo ratings yet
- 5-SpatialFiltering 2Document74 pages5-SpatialFiltering 2pham tamNo ratings yet
- Chapter2 Algorithmic ParadigmsDocument55 pagesChapter2 Algorithmic Paradigmsvunguyen0377242No ratings yet
- DSP Design - Lecture 6: UnfoldingDocument44 pagesDSP Design - Lecture 6: UnfoldingAbdul JabbarNo ratings yet
- Application of Derivatives (Bounce Back)Document156 pagesApplication of Derivatives (Bounce Back)Asty OfficialNo ratings yet
- 3712CSD-KST Content AvesisDocument18 pages3712CSD-KST Content Avesis.0No ratings yet
- Artificial Intelligence: Foundations & Applications: Prof. Partha P. Chakrabarti & Arijit MondalDocument40 pagesArtificial Intelligence: Foundations & Applications: Prof. Partha P. Chakrabarti & Arijit MondalAnil YogiNo ratings yet
- Graphical Method PDFDocument11 pagesGraphical Method PDFShivanand ArwatNo ratings yet
- ORF 307 Optimization Practice Second MidtermDocument6 pagesORF 307 Optimization Practice Second MidtermAdam ChangNo ratings yet
- A Combined Genetic Adaptive Search (Geneas) For Engineering DesignDocument34 pagesA Combined Genetic Adaptive Search (Geneas) For Engineering Designpaskorn100% (2)
- Dr. Sampad Ghosh: Modular Combinational Circuit DesignDocument16 pagesDr. Sampad Ghosh: Modular Combinational Circuit DesignMortuzaNo ratings yet
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionFrom EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionNo ratings yet
- Iare Vlsi Notes 2Document247 pagesIare Vlsi Notes 2ijalab1No ratings yet
- Redhawk Linux User'S Guide: 0898004-300 April 2003Document233 pagesRedhawk Linux User'S Guide: 0898004-300 April 2003ijalab1No ratings yet
- Place & Route Tutorial #1: I. SetupDocument13 pagesPlace & Route Tutorial #1: I. Setupijalab1No ratings yet
- I. Setup For Cadence InnovusDocument20 pagesI. Setup For Cadence Innovusijalab1No ratings yet
- Tutorial InnovusDocument47 pagesTutorial Innovusijalab1No ratings yet
- Lecture 02 HDL PDFDocument216 pagesLecture 02 HDL PDFijalab1No ratings yet
- Asic/Fpga C Asic/Fpga C Chip Design Chip Design: Power Di Power Di Ssipation SsipationDocument51 pagesAsic/Fpga C Asic/Fpga C Chip Design Chip Design: Power Di Power Di Ssipation Ssipationijalab1No ratings yet
- 6 Prime TimeDocument42 pages6 Prime Timeijalab1No ratings yet
- 590-Bypass Hardware Breakpoint ProtectionDocument24 pages590-Bypass Hardware Breakpoint Protectionapi-3754605No ratings yet
- CV 53001 IntroductionDocument49 pagesCV 53001 IntroductionVictor OmotoriogunNo ratings yet
- Quick Guide To MoqDocument12 pagesQuick Guide To MoqZona Educación Especial ZacapaoaxtlaNo ratings yet
- YÖKDİL Fen Cloze Test Soru TipiDocument6 pagesYÖKDİL Fen Cloze Test Soru TipiCengizNo ratings yet
- English G 7 Teacher's Guide (1) (2) .PDF 1695409486637Document44 pagesEnglish G 7 Teacher's Guide (1) (2) .PDF 1695409486637nurhusenebrahim10No ratings yet
- Dost ScholarshipDocument5 pagesDost ScholarshipFue NoirNo ratings yet
- Rocketman AccordiDocument1 pageRocketman AccordiSaverio Ombracorta PorcariNo ratings yet
- Ex. Thread &tapDocument11 pagesEx. Thread &tapSebastianNo ratings yet
- Bi PemahamanDocument11 pagesBi PemahamanAzam SyahiraNo ratings yet
- November 2011 Main ExamDocument7 pagesNovember 2011 Main ExamMduduzi Magiva MahlanguNo ratings yet
- OUTPUT No 3Document6 pagesOUTPUT No 3Princes Gado LuarcaNo ratings yet
- Pitbull Essay 1Document8 pagesPitbull Essay 1api-386452578No ratings yet
- Hydraulic Release ShackleDocument3 pagesHydraulic Release ShackleedriceNo ratings yet
- 9 TH Class Cbse Social Science GeographyDocument63 pages9 TH Class Cbse Social Science GeographyAswin RemesanNo ratings yet
- Che Module 3aDocument127 pagesChe Module 3aPerter K MNo ratings yet
- High Temperature-Grease-pds-EngDocument3 pagesHigh Temperature-Grease-pds-Engdavide comuzziNo ratings yet
- Final Report 2.0Document22 pagesFinal Report 2.0kunalmpatekar10No ratings yet
- The University of Melbourne Mail - Your Enrolment Has Been CancelledDocument3 pagesThe University of Melbourne Mail - Your Enrolment Has Been CancelledFinn HurleyNo ratings yet
- The Effect of Iron in Al-Si Casting Alloys: October 2004Document11 pagesThe Effect of Iron in Al-Si Casting Alloys: October 2004Jothi ManiNo ratings yet
- (Cultural Memory in The Present) Hent de Vries (Editor) - Samuel Weber (Editor) - Religion and Media-Stanford University Press (2001)Document670 pages(Cultural Memory in The Present) Hent de Vries (Editor) - Samuel Weber (Editor) - Religion and Media-Stanford University Press (2001)Mauricio BaezNo ratings yet
- ETHYLENEAMINE E-100 (E-100) : Technical BulletinDocument2 pagesETHYLENEAMINE E-100 (E-100) : Technical BulletinRAFAEL MIERESNo ratings yet
- Critical Assembly of Fission MaterialsDocument25 pagesCritical Assembly of Fission Materialsgreasy LemonsNo ratings yet
- Process Safety Management OutlineDocument24 pagesProcess Safety Management Outlineismailines100% (1)
- SSC CGL Tier-I Practice Set 4Document10 pagesSSC CGL Tier-I Practice Set 4Vothi ThuyhanhNo ratings yet
- Respiration in Plants Class 11 QuestionsDocument3 pagesRespiration in Plants Class 11 QuestionsAshok KumarNo ratings yet
- CPA Canada Standard Practices For Investigative and Forensic Accounting EngagementsDocument27 pagesCPA Canada Standard Practices For Investigative and Forensic Accounting EngagementsJayNo ratings yet
- Acct Statement - XX8434 - 07092022Document7 pagesAcct Statement - XX8434 - 07092022Suhail KhanNo ratings yet