Download as pptx, pdf, or txt
You might also like
- Unit 4 - L Notes - Introduction To MicrocontrollerDocument53 pagesUnit 4 - L Notes - Introduction To MicrocontrollerAKSHANSH MATHUR100% (1)
- Second Year 4TH Sem Question Bank For Microprocessor and Micro ControllerDocument6 pagesSecond Year 4TH Sem Question Bank For Microprocessor and Micro ControllerPRIYA RAJINo ratings yet
- Micro ControllersDocument28 pagesMicro Controllersyoboiiii649No ratings yet
- Unit 4Document85 pagesUnit 4Chadaram JagadishNo ratings yet
- Lecture-1 (Introduction, Hardwired Logic) : MPI Unit 1Document34 pagesLecture-1 (Introduction, Hardwired Logic) : MPI Unit 1Tushar VermaNo ratings yet
- Lec 1 Introduction To MiocroprocessorDocument21 pagesLec 1 Introduction To Miocroprocessor21201151No ratings yet
- Presentaion 6 Microcontroller and MicroprocessorDocument27 pagesPresentaion 6 Microcontroller and MicroprocessorwabdushukurNo ratings yet
- Introduction To Motorola 68HC11: 1.1 ObjectivesDocument36 pagesIntroduction To Motorola 68HC11: 1.1 ObjectivesRaoul ToludNo ratings yet
- What Is A Microprocessor?: Introduction To PICDocument20 pagesWhat Is A Microprocessor?: Introduction To PICNEETHU PRAKASHNo ratings yet
- MCRL01E Module 3Document29 pagesMCRL01E Module 3Kenneth Brian PejiNo ratings yet
- Chapter 1Document45 pagesChapter 1udgam pandeyNo ratings yet
- Microcontroller&Its Applications 2021 NotesDocument38 pagesMicrocontroller&Its Applications 2021 NotesAnirban MandalNo ratings yet
- Introduction To Pic Microcontroller'SDocument4 pagesIntroduction To Pic Microcontroller'SSurbhi JainNo ratings yet
- Module 5 MicroprocessorDocument7 pagesModule 5 MicroprocessornatsuNo ratings yet
- MIT NotesDocument24 pagesMIT Notesrohitkhushalani77No ratings yet
- Intro To Microcomputers: Block Diagram of A Typical MicrocomputerDocument6 pagesIntro To Microcomputers: Block Diagram of A Typical MicrocomputerShaheer TariqNo ratings yet
- Mpi HandbookDocument151 pagesMpi Handbookharshbopaliya13No ratings yet
- Wa0010.Document12 pagesWa0010.v5kbkrmdfpNo ratings yet
- MAI Study MaterialDocument106 pagesMAI Study Materialmanishwakade73No ratings yet
- Introduction To Microprocessor Based SystemDocument30 pagesIntroduction To Microprocessor Based SystemkusumgdasNo ratings yet
- Chapter One Introduction & Evolution of MicroprocessorDocument68 pagesChapter One Introduction & Evolution of Microprocessorabel bahiru100% (1)
- Microprocessors NotesDocument65 pagesMicroprocessors NoteswizardvenkatNo ratings yet
- Mpi Unit 1Document27 pagesMpi Unit 1godhanipriyank8No ratings yet
- Design CharacteristicsDocument11 pagesDesign CharacteristicsFrankline OchiengNo ratings yet
- CS111-PART 3 - Computer Hardware UnitDocument39 pagesCS111-PART 3 - Computer Hardware UnitJian KusanagiNo ratings yet
- Module 1 8051 Microcontroller 1Document52 pagesModule 1 8051 Microcontroller 1unknownwalkernaunknownwalkernaNo ratings yet
- Data Bits (Word Length) It Can Handle at A Time. Initial Prototypes Had 4-Bit Capability. AfterDocument10 pagesData Bits (Word Length) It Can Handle at A Time. Initial Prototypes Had 4-Bit Capability. AfterUiNo ratings yet
- Introduction To 8085 MicroprocessorDocument43 pagesIntroduction To 8085 MicroprocessorYosa Worku100% (1)
- Microprocessors Vs MicrocontrollersDocument40 pagesMicroprocessors Vs MicrocontrollersNgaa SiemensNo ratings yet
- Block Diagram of Digital Computer:: MicroprocessorDocument25 pagesBlock Diagram of Digital Computer:: MicroprocessorRobotrixNo ratings yet
- Microcontrollerpresentation 141213101338 Conversion Gate01Document41 pagesMicrocontrollerpresentation 141213101338 Conversion Gate01priyalNo ratings yet
- MK Lecture 01 EngDocument26 pagesMK Lecture 01 Engwaseem masoudNo ratings yet
- Microprocessor - Introduction To Basic MicroprocessorDocument21 pagesMicroprocessor - Introduction To Basic MicroprocessorTanveer Ahmed HakroNo ratings yet
- Unit1Fmpmc CSDDocument56 pagesUnit1Fmpmc CSDSasii ThadiiNo ratings yet
- Unit - I-1Document13 pagesUnit - I-1vasiharanNo ratings yet
- SEC1310Document169 pagesSEC1310Su YeeNo ratings yet
- Coma Answers PDFDocument12 pagesComa Answers PDFKrishilNo ratings yet
- MPMC 2 MarksDocument13 pagesMPMC 2 Markssetup.143No ratings yet
- 8085 Complete Note PDFDocument54 pages8085 Complete Note PDFBipin GhimireNo ratings yet
- EC 1362 Microprocessor and Micro ControllerDocument32 pagesEC 1362 Microprocessor and Micro ControllerbalarecNo ratings yet
- Lecture 1 - Introduction-To-Microprocessor - Microcontroller PDFDocument16 pagesLecture 1 - Introduction-To-Microprocessor - Microcontroller PDFAnadiKashyapNo ratings yet
- I I M (D - D N) : Ntroduction of Ntroduction of Microprocessor and Icrocontroller R Alia AndiDocument16 pagesI I M (D - D N) : Ntroduction of Ntroduction of Microprocessor and Icrocontroller R Alia AndiHarsh KumarNo ratings yet
- Sample ChapterDocument16 pagesSample ChapterPreetham SaigalNo ratings yet
- Microprocessors & Microcontrollers: Part A 1. What Is Microprocessor?Document21 pagesMicroprocessors & Microcontrollers: Part A 1. What Is Microprocessor?Nenu Meeku TelusaNo ratings yet
- I M (D - D N) : Ntroduction OF Microprocessor AND Icrocontroller R Alia AndiDocument15 pagesI M (D - D N) : Ntroduction OF Microprocessor AND Icrocontroller R Alia AndiHritwik GhoshNo ratings yet
- Microcontroller: College: MCAS Section: V-Semester Presented By: Shabeeba. PDocument13 pagesMicrocontroller: College: MCAS Section: V-Semester Presented By: Shabeeba. PShabeebaNawabNo ratings yet
- Digital Electron Microprocessor Is Semiconductor Device Manufactured by Using TheDocument16 pagesDigital Electron Microprocessor Is Semiconductor Device Manufactured by Using TheKshitij GoelNo ratings yet
- Microprocessors and MicrocontrollersDocument22 pagesMicroprocessors and Microcontrollers6012 ANILNo ratings yet
- Introduction To The 68Hc12 MicrocontrollerDocument28 pagesIntroduction To The 68Hc12 Microcontrollerahetdhaezh100% (2)
- 9 Intelligent InstrumentsDocument45 pages9 Intelligent InstrumentsAli Ahmad100% (1)
- Microprocessor ComponentsDocument2 pagesMicroprocessor ComponentsBryan YaranonNo ratings yet
- Generalities On UcsDocument11 pagesGeneralities On Ucsmarshal galilee djitsaNo ratings yet
- Lecture Note 292311150242100Document101 pagesLecture Note 292311150242100ETCi-101Monalisa RayNo ratings yet
- Department of Computer Science and Engineering Question BankDocument18 pagesDepartment of Computer Science and Engineering Question Bankanand_duraiswamyNo ratings yet
- Introduction To Computing:: Computer SystemsDocument27 pagesIntroduction To Computing:: Computer SystemsPhan Giang ChâuNo ratings yet
- Intro To MPDocument22 pagesIntro To MP211902020No ratings yet
- Unit 1Document6 pagesUnit 1Sonu zehen001No ratings yet
- What Is A MicroprocessorDocument25 pagesWhat Is A MicroprocessorFiromsa DineNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- Digital Electronics, Computer Architecture and Microprocessor Design PrinciplesFrom EverandDigital Electronics, Computer Architecture and Microprocessor Design PrinciplesNo ratings yet
- 8259 Microprocessor: Some Features of This MicroprocessorDocument6 pages8259 Microprocessor: Some Features of This Microprocessorabu sayedNo ratings yet
- 8254 Programmable Interval Timer: CS A1 A0 SelecetionDocument5 pages8254 Programmable Interval Timer: CS A1 A0 Selecetionabu sayedNo ratings yet
- Some Points: PeripheralDocument2 pagesSome Points: Peripheralabu sayedNo ratings yet
- Direct Memory Access (DMA) and The DMA Controller (DMAC) 8237Document24 pagesDirect Memory Access (DMA) and The DMA Controller (DMAC) 8237abu sayedNo ratings yet
- Digital Design Using Verilog HDL PDFDocument108 pagesDigital Design Using Verilog HDL PDFHARISH DAMARLANo ratings yet
- I2CDocument1 pageI2Cvincentho2kNo ratings yet
- COMPUTER KNOWLEDGE - 2000 MCQs PDFDocument83 pagesCOMPUTER KNOWLEDGE - 2000 MCQs PDFVickraman SNo ratings yet
- EE8691-Embedded SystemsDocument12 pagesEE8691-Embedded SystemsumramanNo ratings yet
- Asrock H110 Pro BTC+ Mining System Installation Guide: ConfigurationDocument6 pagesAsrock H110 Pro BTC+ Mining System Installation Guide: ConfigurationdavidNo ratings yet
- Automated Parameter Extraction and SPICE ModelDocument4 pagesAutomated Parameter Extraction and SPICE ModelkimjinNo ratings yet
- S26KS512S Hflash PDFDocument96 pagesS26KS512S Hflash PDFvibhaNo ratings yet
- Laboratory Activity 8 Counter Sequential CircuitsDocument4 pagesLaboratory Activity 8 Counter Sequential CircuitsAdrianne MarianoNo ratings yet
- MCQ in Computer Fundamentals Part 2 ECE Board ExamDocument19 pagesMCQ in Computer Fundamentals Part 2 ECE Board ExamRoyce PaladaNo ratings yet
- Microfriend: Dyna - 85 User's ManualDocument96 pagesMicrofriend: Dyna - 85 User's ManualNeelam KapoorNo ratings yet
- Dos Fundamental Theory Shubham TiwariDocument43 pagesDos Fundamental Theory Shubham TiwarishubhamNo ratings yet
- RS232 Communication Bus, RS485, I2C, SPI, CAN, JTAG PDFDocument20 pagesRS232 Communication Bus, RS485, I2C, SPI, CAN, JTAG PDFndcongNo ratings yet
- Viva Question Bank FmaDocument4 pagesViva Question Bank FmashreemantiNo ratings yet
- TC4426/TC4427/TC4428: 1.5A Dual High-Speed Power MOSFET DriversDocument20 pagesTC4426/TC4427/TC4428: 1.5A Dual High-Speed Power MOSFET DriversOlavo FelterNo ratings yet
- DST Tmpm370fydfg-Tde en 21751Document498 pagesDST Tmpm370fydfg-Tde en 21751trân văn tuấnNo ratings yet
- FSM Case StudiesDocument49 pagesFSM Case StudiespaldarjiNo ratings yet
- Logic Gates TutorialDocument25 pagesLogic Gates TutorialsafariNo ratings yet
- Brosur - Specification Fairbanks FB2550 NEMADocument1 pageBrosur - Specification Fairbanks FB2550 NEMAPT. OMETRACO ARYA SAMANTANo ratings yet
- EDA Open Source Tools WikiDocument13 pagesEDA Open Source Tools WikiNitin PatelNo ratings yet
- JOYPADDocument1 pageJOYPADVladimir PopovicNo ratings yet
- Timing DiagramDocument35 pagesTiming DiagramNew worldNo ratings yet
- 1.what Is Computer? Describe Various Characteristics of Computer?Document10 pages1.what Is Computer? Describe Various Characteristics of Computer?Ramesh GuptaNo ratings yet
- Design Metrics CMOS InverterDocument40 pagesDesign Metrics CMOS InverterPramod SrinivasanNo ratings yet
- INVENTEC KRUG (KRUG 14,15 - UMA) WS BUILD 6050A2296601 REV X01 - Dell Latitude E5420 PDFDocument106 pagesINVENTEC KRUG (KRUG 14,15 - UMA) WS BUILD 6050A2296601 REV X01 - Dell Latitude E5420 PDFBala MuruganNo ratings yet
- Input and Output. Supervisor Mode, Exceptions, Traps. Co-ProcessorsDocument53 pagesInput and Output. Supervisor Mode, Exceptions, Traps. Co-ProcessorsLordwin MichealNo ratings yet
- Power Edge R810Document71 pagesPower Edge R810Tran ThangNo ratings yet
- Dynamic Power Consumption in Virtex™-II FPGA Family: Li Shang Alireza S Kaviani Kusuma BathalaDocument8 pagesDynamic Power Consumption in Virtex™-II FPGA Family: Li Shang Alireza S Kaviani Kusuma BathalaVarun VyasNo ratings yet
- Compuer Organization (Ce-313) Assignment #1 (SOLUTION)Document6 pagesCompuer Organization (Ce-313) Assignment #1 (SOLUTION)RawabiNo ratings yet
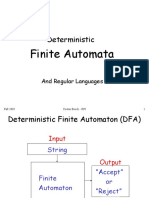
- Deterministic: Finite AutomataDocument56 pagesDeterministic: Finite AutomatatariqravianNo ratings yet