Download as ppt, pdf, or txt
You might also like
- Lecture 2 - VR Input DevicesDocument44 pagesLecture 2 - VR Input Devicesa189100No ratings yet
- Wall Following Robot Obstacle Avoiding RobotDocument9 pagesWall Following Robot Obstacle Avoiding RobotMuhammad FaisalNo ratings yet
- Lecture 0&1 Introduction SensorsDocument34 pagesLecture 0&1 Introduction Sensorstruongcbl12toanNo ratings yet
- Sensors AND Machine VisionDocument78 pagesSensors AND Machine VisionbabuNo ratings yet
- Input Questions - AnswersDocument8 pagesInput Questions - AnswersNayera AlsayedNo ratings yet
- 3s LiDAR - 01 - Introduction & ApplicationDocument163 pages3s LiDAR - 01 - Introduction & Applicationjinlongc7cNo ratings yet
- 3 SensorsActuatorsDocument34 pages3 SensorsActuatorsBorja Golvano MarotoNo ratings yet
- Radar System Using ArduinoDocument13 pagesRadar System Using ArduinoTarang SinghNo ratings yet
- RoboticsDocument17 pagesRoboticsNurmi Elisya RosliNo ratings yet
- Microwave Sensor Technology HFE0407 - PolivkaDocument8 pagesMicrowave Sensor Technology HFE0407 - Polivkatecnolectronica890No ratings yet
- SensorsDocument64 pagesSensorsJoão SantosNo ratings yet
- VRhistoryAppfuture (TMazuryk - Etal) 19 30Document12 pagesVRhistoryAppfuture (TMazuryk - Etal) 19 30sebastian sotoNo ratings yet
- Ultrasonic Radar EAISDocument14 pagesUltrasonic Radar EAISSiddharth maneNo ratings yet
- Alarm System For Human and Animal Detection Slide Presentation Revised (Latest)Document33 pagesAlarm System For Human and Animal Detection Slide Presentation Revised (Latest)slayz0879No ratings yet
- Data Sheet R-SeriesV RH5 Analog 552061 ENDocument11 pagesData Sheet R-SeriesV RH5 Analog 552061 ENMartin Alejandro Rangel ValdezNo ratings yet
- Solid State SensorsDocument39 pagesSolid State SensorsRona Mae Raza RecaldeNo ratings yet
- 7CS4 IOT Unit-2Document141 pages7CS4 IOT Unit-2Nikhil KumarNo ratings yet
- Report 1Document2 pagesReport 1BILAL AHMEDNo ratings yet
- Lecture Plan-Unit IIIDocument18 pagesLecture Plan-Unit IIIKarthik P MuraliNo ratings yet
- ch.2 SummerizationDocument13 pagesch.2 SummerizationNayera AlsayedNo ratings yet
- File - AGR Field Operations TD Handy-Scan Data Sheet - 051210Document2 pagesFile - AGR Field Operations TD Handy-Scan Data Sheet - 051210Dhanasekaran RNo ratings yet
- ARC WELDING ROBOT AssignmentDocument8 pagesARC WELDING ROBOT AssignmentIT11 BHAGYA LAKSHMI VNo ratings yet
- Obstacle Detecting Robot Using Arduino and Sensor: A.Saraswathi, A.Ameer Abbas, S.Indu Mathi, A.EswaranDocument3 pagesObstacle Detecting Robot Using Arduino and Sensor: A.Saraswathi, A.Ameer Abbas, S.Indu Mathi, A.EswaranKiran GadakhNo ratings yet
- OIE 751 ROBOTICS Unit 3 Class 8 (30-10-2020)Document14 pagesOIE 751 ROBOTICS Unit 3 Class 8 (30-10-2020)MICHEL RAJNo ratings yet
- Implementation of Model Radar For Target Identification Using Remote Station Alert SystemDocument8 pagesImplementation of Model Radar For Target Identification Using Remote Station Alert SystemIJRASETPublicationsNo ratings yet
- Auto-Smart Obstacle DetectionDocument5 pagesAuto-Smart Obstacle DetectionIJSTENo ratings yet
- Obstacle Avoidance RobotDocument3 pagesObstacle Avoidance RobotMuhammad AhmadNo ratings yet
- Continuous Vibration Monitoring System Using Gaussian Beams and Artificial Neural NetworkDocument8 pagesContinuous Vibration Monitoring System Using Gaussian Beams and Artificial Neural NetworkAbigor45No ratings yet
- Department of Computer Science EngineeringDocument16 pagesDepartment of Computer Science EngineeringmohitNo ratings yet
- Bomb Detection Robotics Using Embedded ControllerDocument3 pagesBomb Detection Robotics Using Embedded ControllerAman Jain50% (2)
- Radar Mapping Using Ultrasonic Sensor Project Report: ' Submitted For The Course: CONTROL SYSTEMS (ECE2010)Document4 pagesRadar Mapping Using Ultrasonic Sensor Project Report: ' Submitted For The Course: CONTROL SYSTEMS (ECE2010)Harsha VardhanNo ratings yet
- 06 Chapter+6 SensorsDocument92 pages06 Chapter+6 Sensorsபுருஷோத்தமன் ரவீந்திரன்No ratings yet
- Modified Radar ReportDocument17 pagesModified Radar ReportAsif KarimNo ratings yet
- 1910DMTCSE05932 Practical-2 IOTDocument46 pages1910DMTCSE05932 Practical-2 IOTGourav RanaNo ratings yet
- Arduino Based RADAR System ProjectDocument14 pagesArduino Based RADAR System ProjectVijay50% (2)
- HC sr04Document4 pagesHC sr04Abdullah ZafarNo ratings yet
- Military RadarDocument5 pagesMilitary RadarPranav SriniNo ratings yet
- Lv-Maxsonar - Ez™ Series: High Performance Sonar Range FinderDocument11 pagesLv-Maxsonar - Ez™ Series: High Performance Sonar Range FinderBubaka Abu Naufal100% (2)
- 10) Wireless Distance Measurement For Satellites.Document8 pages10) Wireless Distance Measurement For Satellites.kk0511No ratings yet
- Combined Mapping by IRST and LIDAR Technology For Space Applications Technology For Space ApplicationsDocument16 pagesCombined Mapping by IRST and LIDAR Technology For Space Applications Technology For Space ApplicationsMariappan RamaNo ratings yet
- Acoustic Emission Method - Short Presentation For StudentsDocument45 pagesAcoustic Emission Method - Short Presentation For StudentsSubash Naga100% (2)
- Bomb Detection Robotics Using Embedded Controller: Gurdas, KaranDocument4 pagesBomb Detection Robotics Using Embedded Controller: Gurdas, KaranPayel PalNo ratings yet
- Design and Fabrication of Inertial Measurement UnitDocument9 pagesDesign and Fabrication of Inertial Measurement UnitIman AzrbjNo ratings yet
- 04 05 2023 - NorthamptonDocument14 pages04 05 2023 - NorthamptonAdil KhattakNo ratings yet
- Design and Analysis of Automated Guided VehicleDocument11 pagesDesign and Analysis of Automated Guided Vehiclevyshnavipalutla56No ratings yet
- BE ProjectDocument53 pagesBE ProjectDhruv GowdaNo ratings yet
- Sensors Used in Navigation: - Dead ReckoningDocument16 pagesSensors Used in Navigation: - Dead ReckoningEnio DiazNo ratings yet
- WSN - Chapter 1 Introduction2013Document109 pagesWSN - Chapter 1 Introduction2013Debasis DakuaNo ratings yet
- A Laser Radar With High Precision Ranging Based On PhaseDocument9 pagesA Laser Radar With High Precision Ranging Based On Phaseericnian453203No ratings yet
- Radar System Using Arduino: Prof. D.A.Ghoghre, Ahire Dhanshri, Ahire PriyankaDocument4 pagesRadar System Using Arduino: Prof. D.A.Ghoghre, Ahire Dhanshri, Ahire PriyankaBILAL AHMEDNo ratings yet
- Radar System Using Rduino PDFDocument4 pagesRadar System Using Rduino PDFYasser Auliya PNo ratings yet
- 1 7 08-E-Introduction To Radiation Detection Instruments Used For Nuclear Security Purposes MYSDocument32 pages1 7 08-E-Introduction To Radiation Detection Instruments Used For Nuclear Security Purposes MYSMohd Zulhairi Mohd NoorNo ratings yet
- Study of Robotic SensorsDocument4 pagesStudy of Robotic SensorsTb ShilpaNo ratings yet
- SergeyYurish Tutorial SIGNAL 2017Document108 pagesSergeyYurish Tutorial SIGNAL 2017Chao-Shiun WangNo ratings yet
- Remote SENSING Sensors: Indian Institute of Surveying and Mapping HyderabadDocument24 pagesRemote SENSING Sensors: Indian Institute of Surveying and Mapping HyderabadSaurabh SinghNo ratings yet
- Ijet 15857Document5 pagesIjet 15857Manu kumarNo ratings yet
- Assignment 1 SensorsDocument3 pagesAssignment 1 SensorsDivanker SaxenaNo ratings yet
- SEELab3 BrochureDocument19 pagesSEELab3 BrochurebaluNo ratings yet
- Signal Integrity and Radiated Emission of High-Speed Digital SystemsFrom EverandSignal Integrity and Radiated Emission of High-Speed Digital SystemsNo ratings yet
- Search 041005Document39 pagesSearch 041005Hari DeivasigamaniNo ratings yet
- Traditional Applications of VR: Electrical and Computer Engineering DeptDocument113 pagesTraditional Applications of VR: Electrical and Computer Engineering DeptHari DeivasigamaniNo ratings yet
- Online Search AgentsDocument13 pagesOnline Search AgentsHari Deivasigamani100% (1)
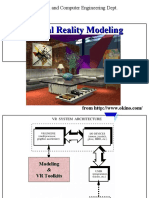
- Virtual Reality ModelingDocument163 pagesVirtual Reality ModelingHari DeivasigamaniNo ratings yet
- Augmented Reality and Virtual Reality For GamingDocument10 pagesAugmented Reality and Virtual Reality For GamingHari DeivasigamaniNo ratings yet
- Output Devices: Graphics, 3-D Sound, Haptics and OlfactoryDocument160 pagesOutput Devices: Graphics, 3-D Sound, Haptics and OlfactoryHari DeivasigamaniNo ratings yet
- Virtual Reality App DevelopmentDocument19 pagesVirtual Reality App DevelopmentHari DeivasigamaniNo ratings yet
- Computing Architectures For Virtual Reality: Electrical and Computer Engineering DeptDocument136 pagesComputing Architectures For Virtual Reality: Electrical and Computer Engineering DeptHari Deivasigamani100% (1)
- Chapter 1Document32 pagesChapter 1Hari DeivasigamaniNo ratings yet
- Tracking: Augmented Reality - Principles and PracticeDocument13 pagesTracking: Augmented Reality - Principles and PracticeHari DeivasigamaniNo ratings yet
- Displays: Augmented Reality - Principles and PracticeDocument44 pagesDisplays: Augmented Reality - Principles and PracticeHari DeivasigamaniNo ratings yet
- Unit I Ar VRDocument20 pagesUnit I Ar VRHari DeivasigamaniNo ratings yet
- Arvr QBDocument5 pagesArvr QBHari DeivasigamaniNo ratings yet
- Indu Lagna - For Waelth and FinanceDocument7 pagesIndu Lagna - For Waelth and Financeybbvvprasada raoNo ratings yet
- Lesson Plan Sience - Body PartsDocument4 pagesLesson Plan Sience - Body Partsapi-307376252No ratings yet
- Chapter 1.2 Types of Organisation (Notes)Document5 pagesChapter 1.2 Types of Organisation (Notes)S RameshNo ratings yet
- Tic EbookDocument215 pagesTic EbookTaju Deen100% (1)
- PLC - HMI Lab #4 22W1Document2 pagesPLC - HMI Lab #4 22W1crazyjmprNo ratings yet
- Hospice SynopsisDocument6 pagesHospice SynopsisPhalguna NaiduNo ratings yet
- J.the Reproduction and Husbandry of The Water Monitor Varanus Salvator at The Gladys Porter Zoo, BrownsvilleDocument7 pagesJ.the Reproduction and Husbandry of The Water Monitor Varanus Salvator at The Gladys Porter Zoo, BrownsvilleAhmad MigifatoniNo ratings yet
- Housekeeping Management Practices and Standards of Selected Hotels and Restaurants of Ilocos Sur, PhilippinesDocument8 pagesHousekeeping Management Practices and Standards of Selected Hotels and Restaurants of Ilocos Sur, PhilippinesMehwish FatimaNo ratings yet
- TTL 2 Lesson 17Document22 pagesTTL 2 Lesson 17Ronie ObiasNo ratings yet
- EC Physical Sciences Grade 11 November 2022 P1 and MemoDocument25 pagesEC Physical Sciences Grade 11 November 2022 P1 and MemokhulntandoNo ratings yet
- Laurel Doll Amigurumi Free PatternDocument21 pagesLaurel Doll Amigurumi Free PatternHuyền TrangNo ratings yet
- DeforestationDocument1 pageDeforestationzaineb chzkibNo ratings yet
- Microsoft Project TOCDocument5 pagesMicrosoft Project TOCali_zulfikarNo ratings yet
- Parasnis - 1951 - Study Rock MidlandsDocument20 pagesParasnis - 1951 - Study Rock MidlandsIsaac KandaNo ratings yet
- Statement of PurposeDocument3 pagesStatement of PurposeehsanNo ratings yet
- BGR AnuualReport 2022-23Document88 pagesBGR AnuualReport 2022-23Rk SharafatNo ratings yet
- B.inggris-Daily ActivitiesDocument11 pagesB.inggris-Daily ActivitiesDadang SopianNo ratings yet
- MTCNA Lab Guide INTRA 1st Edition - Id.en PDFDocument87 pagesMTCNA Lab Guide INTRA 1st Edition - Id.en PDFreyandyNo ratings yet
- FACTORY IO-Sorting of Boxes (1) / PLC - 1 (CPU 1212C AC/DC/Rly) / Pro Gram BlocksDocument3 pagesFACTORY IO-Sorting of Boxes (1) / PLC - 1 (CPU 1212C AC/DC/Rly) / Pro Gram BlocksHasaan HussainNo ratings yet
- Written RequestDocument2 pagesWritten Requestcarvazro100% (1)
- Soc TB 25 May 2017Document37 pagesSoc TB 25 May 2017Ipie BsaNo ratings yet
- EPRI Automated Analysis of Bobbin CoilProbe Eddy Current DataDocument97 pagesEPRI Automated Analysis of Bobbin CoilProbe Eddy Current DataaldeanucuNo ratings yet
- Commerce EMDocument344 pagesCommerce EMSTAR E WORLDNo ratings yet
- Arthur Wolk v. Olson, 10-3352, Opposition To Motion To CertifyDocument56 pagesArthur Wolk v. Olson, 10-3352, Opposition To Motion To CertifyTed FrankNo ratings yet
- Thrift Banks ActDocument25 pagesThrift Banks ActMadelle Pineda100% (1)
- OrganoLithium ReagentDocument6 pagesOrganoLithium ReagentizaowsikNo ratings yet
- Sebp7383 05 00 Allcd - 9Document837 pagesSebp7383 05 00 Allcd - 9Roland Culla100% (1)
- (LN) Orc Eroica - Volume 01 (YP)Document282 pages(LN) Orc Eroica - Volume 01 (YP)FBINo ratings yet
- Lancaster University Dissertation HandbookDocument5 pagesLancaster University Dissertation HandbookPaperWritingServiceCheapAnnArbor100% (1)
- Christmas Vigil MassDocument106 pagesChristmas Vigil MassMary JosephNo ratings yet