Download as ppt, pdf, or txt
You might also like
- Solution Manual For C How To Program 10th by DeitelDocument13 pagesSolution Manual For C How To Program 10th by DeitelMariaHendrickswdkjp100% (86)
- Writeup 3D PerceptionDocument21 pagesWriteup 3D Perceptiongoutam guptaNo ratings yet
- Feature Guide: XG (S) - PON (XG-PON and XGS-PON)Document48 pagesFeature Guide: XG (S) - PON (XG-PON and XGS-PON)mosesNo ratings yet
- Twine Assignment & Guided Self-Evaluation Rubric For CSE 632Document2 pagesTwine Assignment & Guided Self-Evaluation Rubric For CSE 632zobelgbNo ratings yet
- Computer Graphics AnimationDocument37 pagesComputer Graphics AnimationRajesh Maa TamNo ratings yet
- Continuous WorldDocument57 pagesContinuous Worldklik11No ratings yet
- AssigDocument2 pagesAssignilesh7889No ratings yet
- Ponomonium RPG BattleDocument14 pagesPonomonium RPG BattlebarbarianaterNo ratings yet
- Murder in The DarkDocument3 pagesMurder in The DarkKristen Kiyomi MarumotoNo ratings yet
- Parallel & Distributed Simulation Systems: From Chandy/Misra To The High Level Architecture and BeyondDocument98 pagesParallel & Distributed Simulation Systems: From Chandy/Misra To The High Level Architecture and BeyondGabriel OvandoNo ratings yet
- Elementary Data Structures - Stacks, Queues, & Lists, Amortized Analysis TreesDocument41 pagesElementary Data Structures - Stacks, Queues, & Lists, Amortized Analysis TreesFrancesHsiehNo ratings yet
- Ch5 - Basic Computer Organization and DesignDocument44 pagesCh5 - Basic Computer Organization and DesignGagan ChandelNo ratings yet
- General Guidelines For Industrial Attachment FinalDocument6 pagesGeneral Guidelines For Industrial Attachment FinalBilly NdawanaNo ratings yet
- Computer Graphics Question Bank UNIT IDocument4 pagesComputer Graphics Question Bank UNIT IqwdfghNo ratings yet
- Chapter One: 1.1 Introduction To ProgrammingDocument10 pagesChapter One: 1.1 Introduction To Programmingnegash belihuNo ratings yet
- Homework Chapter 2 IT2600 - 602Document2 pagesHomework Chapter 2 IT2600 - 602James FiguracionNo ratings yet
- CG Book 3rd EditionDocument385 pagesCG Book 3rd EditionMarieke KortsmitNo ratings yet
- MultimediaDocument6 pagesMultimediavikashisur100% (1)
- Game of Life ETEC 526Document27 pagesGame of Life ETEC 526Kristin McCloskeyNo ratings yet
- Computer Animation: From Wikipedia, The Free EncyclopediaDocument9 pagesComputer Animation: From Wikipedia, The Free EncyclopediaMarque Cedrick AdrianoNo ratings yet
- HCI TestDocument2 pagesHCI TestAura M M CelestinoNo ratings yet
- CS602 Computer Graphics PDF Handouts Virtual UniversityDocument435 pagesCS602 Computer Graphics PDF Handouts Virtual UniversityazharjavedNo ratings yet
- Unit I Basics of Computer GraphicsDocument37 pagesUnit I Basics of Computer GraphicsbjchwbjhNo ratings yet
- Multimedia Systems FinalDocument29 pagesMultimedia Systems FinalAnonymous PaUyyhf1OT100% (1)
- Multimedia Authoring Tools: Basya B. A. - 1601212012 Kevin F. - 1601213955Document23 pagesMultimedia Authoring Tools: Basya B. A. - 1601212012 Kevin F. - 1601213955Myrtyl Sriwahyuni Santos100% (1)
- Final Year Project Proposal (Department of Computer Science)Document2 pagesFinal Year Project Proposal (Department of Computer Science)Shahzaib KhanNo ratings yet
- Presentation On Image CompressionDocument28 pagesPresentation On Image Compressionbushra819100% (2)
- Computer Graphics Ii: Opengl IntroductionDocument24 pagesComputer Graphics Ii: Opengl IntroductionGeorgescu GabrielNo ratings yet
- Moore's Law - Wikipedia, The Free Encyclopedia PDFDocument17 pagesMoore's Law - Wikipedia, The Free Encyclopedia PDFsaospieNo ratings yet
- Procedural Generation of Levels For Puzzle GameDocument9 pagesProcedural Generation of Levels For Puzzle GamePrakash PrasadNo ratings yet
- Research and Development On Ultimate HoopsDocument5 pagesResearch and Development On Ultimate HoopsSEP-PublisherNo ratings yet
- Project SynopsisDocument9 pagesProject Synopsisshruti raiNo ratings yet
- Computer Graphics - Saurabh Kumar (01714402009) Bca 3 YearDocument35 pagesComputer Graphics - Saurabh Kumar (01714402009) Bca 3 Yearnikhil jain100% (1)
- Presentation 1Document18 pagesPresentation 1bekemaNo ratings yet
- PSY321 Lecture Notes 7Document5 pagesPSY321 Lecture Notes 7Yokio KNo ratings yet
- The Computer in HCIDocument55 pagesThe Computer in HCIsibhat mequanintNo ratings yet
- Ch04 - Multimedia Element-ImagesDocument63 pagesCh04 - Multimedia Element-Imagessu6aNo ratings yet
- Code 5 Diffie Hellman Key ExchangeDocument6 pagesCode 5 Diffie Hellman Key ExchangeMuthuselvan Thillairajan100% (1)
- CDocument146 pagesCShankar Subramaniyam100% (1)
- CG-Full-Note For PU PDFDocument77 pagesCG-Full-Note For PU PDFirusha0% (1)
- Ai & Es ExperimentsDocument72 pagesAi & Es ExperimentsVishesh ShrivastavaNo ratings yet
- Artificial IntelligenceDocument136 pagesArtificial IntelligenceAbeerHassanNo ratings yet
- C# ProgramizDocument58 pagesC# ProgramizAPOLNo ratings yet
- For (A 1 A< 100 A++) Printf (" %d/n", A A)Document12 pagesFor (A 1 A< 100 A++) Printf (" %d/n", A A)Muhammad Ahtisham Ul HaqNo ratings yet
- CG Chapter 1-5Document79 pagesCG Chapter 1-5Aschalew AyeleNo ratings yet
- Lecture 02: Multimedia Data (Image and Audio)Document30 pagesLecture 02: Multimedia Data (Image and Audio)Shashi Bhushan KotwalNo ratings yet
- Introduction-To-Programming 10Document14 pagesIntroduction-To-Programming 10Joseph OndouaNo ratings yet
- Computer GraphicsDocument22 pagesComputer GraphicsJyuNo ratings yet
- A - B - C - D - E.: Answer: ExplanationDocument21 pagesA - B - C - D - E.: Answer: Explanationlaxmi bagadeNo ratings yet
- What Is Unity? Everything You Need To KnowDocument9 pagesWhat Is Unity? Everything You Need To KnowYanyan AlfanteNo ratings yet
- Applied Sciences: Multi-Agent SystemsDocument7 pagesApplied Sciences: Multi-Agent SystemsnavecNo ratings yet
- Chapter1 IntroductionDocument24 pagesChapter1 IntroductionChikgu PazleechNo ratings yet
- Structural Skeleton ShapesDocument5 pagesStructural Skeleton ShapessheiwyNo ratings yet
- Computer Graphics ++Document189 pagesComputer Graphics ++Harry JackNo ratings yet
- Mastering Unity: Advanced Techniques for Interactive Design: Unity Game Development SeriesFrom EverandMastering Unity: Advanced Techniques for Interactive Design: Unity Game Development SeriesNo ratings yet
- How to Make a Game: Go From Idea to Publication Avoiding the Common Pitfalls Along the WayFrom EverandHow to Make a Game: Go From Idea to Publication Avoiding the Common Pitfalls Along the WayNo ratings yet
- Practical Shader Development: Vertex and Fragment Shaders for Game DevelopersFrom EverandPractical Shader Development: Vertex and Fragment Shaders for Game DevelopersNo ratings yet
- A Design Methodology For Implementing DSP With Xilinx System Generator For MatlabDocument5 pagesA Design Methodology For Implementing DSP With Xilinx System Generator For MatlabmohamedartyumNo ratings yet
- Search 041005Document39 pagesSearch 041005Hari DeivasigamaniNo ratings yet
- Online Search AgentsDocument13 pagesOnline Search AgentsHari Deivasigamani100% (1)
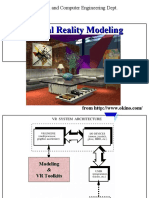
- Virtual Reality ModelingDocument163 pagesVirtual Reality ModelingHari DeivasigamaniNo ratings yet
- Traditional Applications of VR: Electrical and Computer Engineering DeptDocument113 pagesTraditional Applications of VR: Electrical and Computer Engineering DeptHari DeivasigamaniNo ratings yet
- Augmented Reality and Virtual Reality For GamingDocument10 pagesAugmented Reality and Virtual Reality For GamingHari DeivasigamaniNo ratings yet
- Virtual Reality App DevelopmentDocument19 pagesVirtual Reality App DevelopmentHari DeivasigamaniNo ratings yet
- Input Devices: Trackers, Navigation and Gesture InterfacesDocument108 pagesInput Devices: Trackers, Navigation and Gesture InterfacesHari Deivasigamani100% (1)
- Output Devices: Graphics, 3-D Sound, Haptics and OlfactoryDocument160 pagesOutput Devices: Graphics, 3-D Sound, Haptics and OlfactoryHari DeivasigamaniNo ratings yet
- Chapter 1Document32 pagesChapter 1Hari DeivasigamaniNo ratings yet
- Tracking: Augmented Reality - Principles and PracticeDocument13 pagesTracking: Augmented Reality - Principles and PracticeHari DeivasigamaniNo ratings yet
- Unit I Ar VRDocument20 pagesUnit I Ar VRHari DeivasigamaniNo ratings yet
- Arvr QBDocument5 pagesArvr QBHari DeivasigamaniNo ratings yet
- Displays: Augmented Reality - Principles and PracticeDocument44 pagesDisplays: Augmented Reality - Principles and PracticeHari DeivasigamaniNo ratings yet
- ADC1001 10-Bit P Compatible A/D Converter: General Description FeaturesDocument9 pagesADC1001 10-Bit P Compatible A/D Converter: General Description FeaturesLuis Fernando Garcia SNo ratings yet
- Application of WIPL-D Pro CAD To Flexible AntennasDocument2 pagesApplication of WIPL-D Pro CAD To Flexible AntennasDaniel MestradoUNBNo ratings yet
- Token - Vip - 30dias de Uso para Deathcore o TrinitycoreDocument2 pagesToken - Vip - 30dias de Uso para Deathcore o Trinitycorevictor manuel diazNo ratings yet
- Netscaler Command ReferenceDocument1,648 pagesNetscaler Command ReferencesyaamliveNo ratings yet
- BCA SEM1 C SyllabusDocument5 pagesBCA SEM1 C SyllabusBhaisaheb SudairNo ratings yet
- MikroİşlemcilerDocument27 pagesMikroİşlemcilerBumin CengizNo ratings yet
- Java Lab ManualDocument31 pagesJava Lab ManualPranitee HaroleNo ratings yet
- Computer Disassembly: Tle 9: Information and Communication TechnologyDocument8 pagesComputer Disassembly: Tle 9: Information and Communication TechnologyRuby rubellsNo ratings yet
- Ccna Day 12 RSTP EtherchannelDocument16 pagesCcna Day 12 RSTP EtherchannelMd MoizuddinNo ratings yet
- HolistikDocument56 pagesHolistikNuraliyah billyNo ratings yet
- Samea Yusofi-Name ServiceDocument44 pagesSamea Yusofi-Name Servicesebghat aslamzaiNo ratings yet
- How To Use PUA Encoded FontsDocument4 pagesHow To Use PUA Encoded FontsAbdulSalamAhmedNo ratings yet
- Epson EcoTank L5296Document2 pagesEpson EcoTank L5296Admin Ops Inspeksi TeknikNo ratings yet
- FLAT Module-IDocument123 pagesFLAT Module-Ivishnu ggNo ratings yet
- Log File Locked by Another ApplicationDocument7 pagesLog File Locked by Another ApplicationДмитроNo ratings yet
- IndicromeDocument6 pagesIndicromecarlos samilaNo ratings yet
- 1st ChapterDocument22 pages1st ChapterKaranpal Singh JulkaNo ratings yet
- Database Lab ReportDocument17 pagesDatabase Lab Reportprofessor dubeNo ratings yet
- ISTQB Question Paper7Document6 pagesISTQB Question Paper7KapildevNo ratings yet
- IE1204 Digital Design F12: Asynchronous Sequential Circuits (Part 1)Document57 pagesIE1204 Digital Design F12: Asynchronous Sequential Circuits (Part 1)dhanalakshmiNo ratings yet
- Sheik Nurjahan 732-318-1834 Norfolk, VADocument6 pagesSheik Nurjahan 732-318-1834 Norfolk, VAAshvini MahajanNo ratings yet
- Chapter 1 - Introduction To Embedded SystemDocument9 pagesChapter 1 - Introduction To Embedded SystemStephanie CalabungNo ratings yet
- (2 Points) : Hi Nithya, When You Submit This Form, The Owner Will Be Able To See Your Name and Email Address. RequiredDocument13 pages(2 Points) : Hi Nithya, When You Submit This Form, The Owner Will Be Able To See Your Name and Email Address. RequirednithyahimaliniNo ratings yet
- ZKTeco+Fingerprint+Scanner+SDK+Selection+Guide Ver3.0Document1 pageZKTeco+Fingerprint+Scanner+SDK+Selection+Guide Ver3.0Franklin MamaniNo ratings yet
- Interoevery: Microservice Based Interoperable SystemDocument6 pagesInteroevery: Microservice Based Interoperable SystemBADR EL KHALYLYNo ratings yet
- Old Shalimar Academy Old Shalimar Academy Old Shalimar Academy Old Shalimar AcademyDocument1 pageOld Shalimar Academy Old Shalimar Academy Old Shalimar Academy Old Shalimar AcademyAhsan MughalNo ratings yet
- Practicals of Iii, V, Vii Sem (13.12.2021 To 17.12.2021) Under The Responsiblity of Hoi/ Hod / Exam Supdt of Group "A"Document10 pagesPracticals of Iii, V, Vii Sem (13.12.2021 To 17.12.2021) Under The Responsiblity of Hoi/ Hod / Exam Supdt of Group "A"Priyanshu SengarNo ratings yet
- Acoustica Keygen Release 1.install The Software. 2.generate A Serial With Our Keygen. 3.register With The License. (Registrationid Email) 4.enjoy! Team R2R 2015Document1 pageAcoustica Keygen Release 1.install The Software. 2.generate A Serial With Our Keygen. 3.register With The License. (Registrationid Email) 4.enjoy! Team R2R 2015Timos KamikaziNo ratings yet