Download as ppt, pdf, or txt
You might also like
- BESM 3 Character Creator: ?? ??? CM ?? KG M/F?Document5 pagesBESM 3 Character Creator: ?? ??? CM ?? KG M/F?Javontay PeoplesNo ratings yet
- B2 TestDocument18 pagesB2 TestTamara Cruz100% (1)
- Cultural HegemonyDocument6 pagesCultural HegemonyAlbert García100% (1)
- Dormitary Management System: Name IDDocument42 pagesDormitary Management System: Name IDZemenu YtayheNo ratings yet
- Assignment # 6 Sectiona (Structured) 1A (I) 1A (Ii) 1A (Iii) Total Marks Per Question Students NameDocument4 pagesAssignment # 6 Sectiona (Structured) 1A (I) 1A (Ii) 1A (Iii) Total Marks Per Question Students NameUnkown WetlordNo ratings yet
- Park 1Document12 pagesPark 1Hiba KNo ratings yet
- Lecture14 FibonnaciDocument91 pagesLecture14 Fibonnaciaudeliocerezo103No ratings yet
- Inventory Test in Hekasi V: Item No. Name of PupilsDocument13 pagesInventory Test in Hekasi V: Item No. Name of PupilsHanzelkris CubianNo ratings yet
- Sealant UpdateDocument120 pagesSealant Updateadipariabardam.konsultanNo ratings yet
- Revis ÕesDocument24 pagesRevis ÕesRafael BássoliNo ratings yet
- Log BookDocument32 pagesLog BookPrimiandrianza ProrenataNo ratings yet
- Algebra Tiles: X Templates Print Onto Green Coloured Paper, Laminate and Cut OutDocument5 pagesAlgebra Tiles: X Templates Print Onto Green Coloured Paper, Laminate and Cut OutHaimen BuisanNo ratings yet
- HanyuDocument1 pageHanyuLuo Zheng JingNo ratings yet
- ANALISIS Asesmen Akhir smt2 BSunda kls1 2023-2024Document8 pagesANALISIS Asesmen Akhir smt2 BSunda kls1 2023-2024sdn tunggakjati1No ratings yet
- Item Analysis With Mps FormatDocument4 pagesItem Analysis With Mps FormatBENES DOPITILLONo ratings yet
- GERMANY Bundesliga 2018Document49 pagesGERMANY Bundesliga 2018sergilesNo ratings yet
- Cuadro de VariablesDocument26 pagesCuadro de VariablesAlonso ArtetaNo ratings yet
- Bil Nama Murid Nombor Soalan 1 2 3Document3 pagesBil Nama Murid Nombor Soalan 1 2 3Nor Rizan KasimNo ratings yet
- Exel NeopixelesDocument48 pagesExel NeopixelesTHE TOXICOシNo ratings yet
- Tester Junio LiverpoolDocument12 pagesTester Junio LiverpoolLizbeth GómezNo ratings yet
- Responden Input YuliDocument12 pagesResponden Input YuliheryadiNo ratings yet
- Item AnalysisDocument4 pagesItem AnalysisCrisanto LanceNo ratings yet
- Analisis Item Sains Kertas 1, AR 1,2017Document1 pageAnalisis Item Sains Kertas 1, AR 1,2017GABRIEL HARRIS MIDOT MoeNo ratings yet
- Pre Test KeputihanDocument3 pagesPre Test KeputihanAyu Diah Sri Krisnayanti PutuNo ratings yet
- Absen Makan BorDocument13 pagesAbsen Makan Borikhsan kholidNo ratings yet
- Clase 09c - Lazos en Mapas de KarnaughDocument2 pagesClase 09c - Lazos en Mapas de KarnaughdiegoastelliNo ratings yet
- InformedDocument174 pagesInformedrekammedisrsasriNo ratings yet
- Soal Mid Asesmen Tes 2020 RelaibelitasDocument3 pagesSoal Mid Asesmen Tes 2020 RelaibelitasridhoNo ratings yet
- BlotDocument16 pagesBlotjpsilbatoNo ratings yet
- RBI - XLSX DOCSDocument12 pagesRBI - XLSX DOCSJubert BarcenasNo ratings yet
- Final Examination Stem (BSIT) - Desipolo, Jimmuel D.Document13 pagesFinal Examination Stem (BSIT) - Desipolo, Jimmuel D.Jimmuel DesipoloNo ratings yet
- Master DSADocument53 pagesMaster DSACherry Charan TejNo ratings yet
- Construir Funcion LogicaDocument1 pageConstruir Funcion Logicadanielfernandomorales09No ratings yet
- Annotated-Construir Funcion LogicaDocument1 pageAnnotated-Construir Funcion Logicadanielfernandomorales09No ratings yet
- Quizalize TQC GOI2 1-2Document8 pagesQuizalize TQC GOI2 1-2TQC国際人材協力及び訓練センターNo ratings yet
- Redes Neuronales PC01Document2 pagesRedes Neuronales PC01Cristian OrbegosoNo ratings yet
- Tabulasi DataDocument4 pagesTabulasi DataSehari HariNo ratings yet
- Nombre KarnaughDocument24 pagesNombre KarnaughSebastian CordobaNo ratings yet
- TITANICDocument50 pagesTITANICAna Maria RodriguezNo ratings yet
- Fiorella DibujoDocument4 pagesFiorella DibujoJunior Joel Barahona CamanaNo ratings yet
- Minimult 3Document30 pagesMinimult 3Ian F SANo ratings yet
- Number Systems TopicDocument9 pagesNumber Systems TopicHeybaejuliaNo ratings yet
- QT Mean Mode MedianDocument5 pagesQT Mean Mode Medianmittalayush0604No ratings yet
- Tabelas PPR - R00 ExperimentalDocument51 pagesTabelas PPR - R00 Experimentalandersoncosta9181No ratings yet
- Research Tally SheetDocument85 pagesResearch Tally SheetSederiku KabaruzaNo ratings yet
- Hahhaha YouuuuDocument1 pageHahhaha YouuuuJohn Mark TeatroNo ratings yet
- Activity 1.2Document4 pagesActivity 1.2willem goghNo ratings yet
- LILISDocument8 pagesLILISridhoan juliansyahNo ratings yet
- 01 Sample Tabulation of Scores 1Document4 pages01 Sample Tabulation of Scores 1Kenneth CristalNo ratings yet
- Ev Plani 1Document1 pageEv Plani 1Izzet BozkurtNo ratings yet
- Strip Chart JNKK Roads - Upto 25 OCT-2023Document12 pagesStrip Chart JNKK Roads - Upto 25 OCT-2023DanielNo ratings yet
- Dinosaur ArtDocument1 pageDinosaur ArtlexnschubeNo ratings yet
- Taller Abierto Preguntas CerradasDocument2 pagesTaller Abierto Preguntas CerradasRaúl PeñarandaNo ratings yet
- 693ef-Project Management For Engineers and Construction-Mabroke-Blogspot-ComDocument1 page693ef-Project Management For Engineers and Construction-Mabroke-Blogspot-ComAli EzzatNo ratings yet
- Master Tabel Karakteristik RespondenDocument4 pagesMaster Tabel Karakteristik RespondenAceng OmpiNo ratings yet
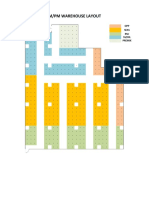
- RM/PM Warehouse Layout: OPP Seas RSC Ss/Oil PremixDocument1 pageRM/PM Warehouse Layout: OPP Seas RSC Ss/Oil PremixAlyssa ParasNo ratings yet
- The Golden Ratio, Fibonacci Numbers, and Other RecurrencesDocument87 pagesThe Golden Ratio, Fibonacci Numbers, and Other RecurrencesNitin JangidNo ratings yet
- Curso: Tema: Profesor: Alumno:: Sistemas DigitalesDocument3 pagesCurso: Tema: Profesor: Alumno:: Sistemas DigitalesJOSE ALFONSO SANCHEZ HUACHESNo ratings yet
- Laboratorio 1 - Instrumentación Electrónica I - Romero Herrera, Fernando JesúsDocument6 pagesLaboratorio 1 - Instrumentación Electrónica I - Romero Herrera, Fernando JesúsFJRH the bossNo ratings yet
- 04EE6501 CourseplanDocument4 pages04EE6501 CourseplanSheik MohammedNo ratings yet
- EwferbDocument14 pagesEwferbAnggie Dennyswara SuryaputraNo ratings yet
- GeeeDocument3 pagesGeeeNatalia JimenaNo ratings yet
- What's Cooking: Digital Transformation of the Agrifood SystemFrom EverandWhat's Cooking: Digital Transformation of the Agrifood SystemNo ratings yet
- How To Sell On Amazon Fo.9167447.PowerpointDocument2 pagesHow To Sell On Amazon Fo.9167447.Powerpointali razaNo ratings yet
- News-Application Form For EmploymentDocument4 pagesNews-Application Form For Employmentali razaNo ratings yet
- Application and Biodata Form GCWUFDocument6 pagesApplication and Biodata Form GCWUFali razaNo ratings yet
- Data Structures Lecture No. 02: Reading MaterialDocument8 pagesData Structures Lecture No. 02: Reading Materialali razaNo ratings yet
- Fiber Optic Communications Technology - D. K. Mynbaev and L. L. ScheinerDocument72 pagesFiber Optic Communications Technology - D. K. Mynbaev and L. L. Scheinerali raza100% (1)
- Virtual University MTH603 Numerical Analysis Mid Term 2011 Subjective Solved Past Papers by MoaazDocument58 pagesVirtual University MTH603 Numerical Analysis Mid Term 2011 Subjective Solved Past Papers by Moaazali razaNo ratings yet
- Recovery PDFDocument1 pageRecovery PDFparkerrichNo ratings yet
- An Instructional Design For Developing An Effective Blended Learning EnvironmentDocument8 pagesAn Instructional Design For Developing An Effective Blended Learning Environmentali razaNo ratings yet
- Homework 8: Solutions - Math 110 INSTRUCTOR: George VoutsadakisDocument2 pagesHomework 8: Solutions - Math 110 INSTRUCTOR: George Voutsadakisali razaNo ratings yet
- NUST School of Electrical Engineering and Computer Sciences: (Photonic Network MSIT-8 2 Semester)Document2 pagesNUST School of Electrical Engineering and Computer Sciences: (Photonic Network MSIT-8 2 Semester)ali razaNo ratings yet
- Meda AJSwart EJEE LearningOutcomesDocument15 pagesMeda AJSwart EJEE LearningOutcomesali razaNo ratings yet
- Course Outline COE768: Introduction of Computer NetworksDocument3 pagesCourse Outline COE768: Introduction of Computer Networksali razaNo ratings yet
- Hive For SQL Users: Cheat SheetDocument3 pagesHive For SQL Users: Cheat Sheetsrikanth07balusuNo ratings yet
- Presentation On Reflection in C#Document19 pagesPresentation On Reflection in C#harman_bajwa_4No ratings yet
- Group Assignment-I Guidelines (BBA MM-II)Document2 pagesGroup Assignment-I Guidelines (BBA MM-II)nivedita choudhuryNo ratings yet
- Block Control System使用说明书Document134 pagesBlock Control System使用说明书Abdelghani ZitouniNo ratings yet
- Mid Term 2 PLSQLDocument23 pagesMid Term 2 PLSQLEric GongNo ratings yet
- Cambridge O Level: Mathematics (Syllabus D) 3171/22 May/June 2021Document10 pagesCambridge O Level: Mathematics (Syllabus D) 3171/22 May/June 2021Innovative BoyNo ratings yet
- Republic of The Philippines Commission On Higher Education Daraga Community College Daraga, AlbayDocument3 pagesRepublic of The Philippines Commission On Higher Education Daraga Community College Daraga, AlbayMaria Angelica Tuella100% (3)
- Documents Posters Encryption PlotterDocument1 pageDocuments Posters Encryption PlotterJames HeathNo ratings yet
- Brix Manual Bios-Quick-GuideDocument14 pagesBrix Manual Bios-Quick-GuideJohn GaltNo ratings yet
- Moulton. Milligan. The Vocabulary of The Greek Testament Illustrated From The Papyri and Other Non-Literary Sources. 1914.Document748 pagesMoulton. Milligan. The Vocabulary of The Greek Testament Illustrated From The Papyri and Other Non-Literary Sources. 1914.Patrologia Latina, Graeca et Orientalis94% (16)
- Η Αποικία Των Μανιατών Στην ΚορσικηDocument46 pagesΗ Αποικία Των Μανιατών Στην ΚορσικηΔημητρης Καψας100% (1)
- Openai Api Cookbook Build Intelligent Applications Including Chatbots Virtual Assistants and Content Generators 1St Edition Henry Habib Full ChapterDocument68 pagesOpenai Api Cookbook Build Intelligent Applications Including Chatbots Virtual Assistants and Content Generators 1St Edition Henry Habib Full Chapterpeter.gjertsen340100% (4)
- 513 653 1 SM PDFDocument8 pages513 653 1 SM PDFanisa fahiraNo ratings yet
- Bean Sprout LessonDocument4 pagesBean Sprout Lessonapi-317230123No ratings yet
- An Efficient Algorithm For Enumerating Closed Patterns in Transaction DatabasesDocument15 pagesAn Efficient Algorithm For Enumerating Closed Patterns in Transaction Databasesk.s insandjiNo ratings yet
- Easy68k A Beginners GuideDocument10 pagesEasy68k A Beginners Guidekayleexsmiles100% (4)
- Golden RuleDocument2 pagesGolden RuleYour OutlookNo ratings yet
- Coloring VertexDocument14 pagesColoring VertexejuneorNo ratings yet
- AEF 2 File Test 1Document4 pagesAEF 2 File Test 1Jaime Rodriguez VillanuevaNo ratings yet
- Romeo and Juliet: Question BankDocument8 pagesRomeo and Juliet: Question BankAnjelene TerezNo ratings yet
- Lab Report No-02: Delete and Traverse in ArrayDocument4 pagesLab Report No-02: Delete and Traverse in ArraySyed raghib shahNo ratings yet
- Sidney Kohlberg and Brunner AssignmentDocument6 pagesSidney Kohlberg and Brunner AssignmentMalipa Sidney100% (1)
- Dickens. Thesis. English Department of FKIP UMSU. Medan. 2009Document3 pagesDickens. Thesis. English Department of FKIP UMSU. Medan. 2009Rama DhansiNo ratings yet
- Beed 16 Multigrade DLPDocument10 pagesBeed 16 Multigrade DLPDesyrie Joy Soriano DirayNo ratings yet
- Lesson 7: I. VocabularyDocument7 pagesLesson 7: I. Vocabularymmtomimoto100% (1)
- Ativação Lte 5g Du BB Vivo SP Revh 08-01-2020Document3,865 pagesAtivação Lte 5g Du BB Vivo SP Revh 08-01-2020ashwinivimalNo ratings yet
- Approach To A Child With HemiplegiaDocument5 pagesApproach To A Child With HemiplegiaBeenish IqbalNo ratings yet