Download as pptx, pdf, or txt
You might also like
- Rane Price ListDocument31 pagesRane Price ListShree Tapi Diesel100% (1)
- 003 - Option B Chapter 14 Engineering Physics PDFDocument62 pages003 - Option B Chapter 14 Engineering Physics PDFyuke kristinaNo ratings yet
- Trident 2 PowerscreenDocument9 pagesTrident 2 PowerscreenRomuald PogorzelczykNo ratings yet
- Calculation of Screw Action ForceDocument3 pagesCalculation of Screw Action ForceShivam Gukhoul100% (1)
- Lecture24 - FORCE ANALYSIS OF MECHANISMSDocument8 pagesLecture24 - FORCE ANALYSIS OF MECHANISMSShivaniNo ratings yet
- DOM Group PPT Vertical Shaft BalancingDocument12 pagesDOM Group PPT Vertical Shaft BalancingPhalgunNo ratings yet
- Ch1 Static ForcesDocument19 pagesCh1 Static ForcesSIDDHARTH JHANo ratings yet
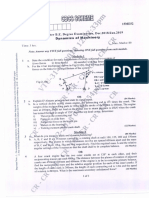
- Dynamics of Machinery: DefinitionsDocument52 pagesDynamics of Machinery: Definitionsemre ozdemirNo ratings yet
- Strength of Materials I: (SI Units)Document135 pagesStrength of Materials I: (SI Units)shjahsjansha100% (3)
- PL - Moment Sily, Momentová VetaDocument9 pagesPL - Moment Sily, Momentová VetaAndrej ZápotočnýNo ratings yet
- Dom - 2marks MinimumDocument4 pagesDom - 2marks MinimumRobinston Jeyasingh KNo ratings yet
- Chapter-3: Force Acting On Particles and Rigid BodyDocument22 pagesChapter-3: Force Acting On Particles and Rigid BodySamyog AcharyaNo ratings yet
- Shear and Moment, Simply Supported BeamDocument34 pagesShear and Moment, Simply Supported BeamMarc ZaatarNo ratings yet
- TOM NotesDocument224 pagesTOM NotesGirish SapreNo ratings yet
- Basics of Strength of MaterialDocument45 pagesBasics of Strength of MaterialGaurav ChopraNo ratings yet
- Solid Mechanics - Torsion Part 2Document11 pagesSolid Mechanics - Torsion Part 2azlan haziqNo ratings yet
- 15ME52 DOM Dec-2018Document40 pages15ME52 DOM Dec-2018prashanthattiNo ratings yet
- Lecture NotesDocument93 pagesLecture Notespreciouspearl99No ratings yet
- Energy MethodDocument44 pagesEnergy MethodZulfadhli ZainudinNo ratings yet
- Coupling Between Static Friction Force and Torque For A TripodDocument7 pagesCoupling Between Static Friction Force and Torque For A TripodZaya TunNo ratings yet
- 15MEC302 Dynamics of Machines Static Force Analysis Solved ProblemsDocument21 pages15MEC302 Dynamics of Machines Static Force Analysis Solved ProblemsAashrith VNo ratings yet
- 7.5 Analysis of Girder BridgesDocument7 pages7.5 Analysis of Girder BridgesMasood AhmedNo ratings yet
- 7.5 Analysis of Girder BridgesDocument7 pages7.5 Analysis of Girder Bridgesvinny133203No ratings yet
- Experiment No 5: ObjectiveDocument4 pagesExperiment No 5: ObjectiveAhmed ImranNo ratings yet
- Unit 1 Staticforceanalysis 131127012056 Phpapp02Document23 pagesUnit 1 Staticforceanalysis 131127012056 Phpapp02Ahmed Sobhi l أحمد صبحيNo ratings yet
- Module 1 Dynamics of MachinesDocument15 pagesModule 1 Dynamics of MachinesShubham kutteNo ratings yet
- DOM CompressedDocument132 pagesDOM CompressedShailender SinghNo ratings yet
- Strength of Materials: (SI Units)Document11 pagesStrength of Materials: (SI Units)Fitra VertikalNo ratings yet
- Torsion Pendulum A Mechanical Nonlinear OscillatorDocument7 pagesTorsion Pendulum A Mechanical Nonlinear OscillatorLeo ChakravartyNo ratings yet
- Torsion LectureDocument91 pagesTorsion LectureY o oNo ratings yet
- Unit 1 Dynamics of MachineryDocument17 pagesUnit 1 Dynamics of Machineryswetha shree chavan mNo ratings yet
- Lecture 4 - Moments v2 PDFDocument34 pagesLecture 4 - Moments v2 PDFAyeeSerranoNo ratings yet
- F18 - 06 Tos ManualDocument33 pagesF18 - 06 Tos ManualAnoshia AdnanNo ratings yet
- Module 7 (Subtopics 1 and 2)Document29 pagesModule 7 (Subtopics 1 and 2)priyesh.bhatiaNo ratings yet
- Module 7 (Subtopics 1 and 2)Document29 pagesModule 7 (Subtopics 1 and 2)priyesh.bhatiaNo ratings yet
- An Axial Cycloidal Magnetic Gear That Minimizes The Unbalanced Radial ForceDocument10 pagesAn Axial Cycloidal Magnetic Gear That Minimizes The Unbalanced Radial ForceHailin HuangNo ratings yet
- Som 2 MarksDocument14 pagesSom 2 MarksSelvaraj GNo ratings yet
- Force System and EquilibriumDocument95 pagesForce System and EquilibriumLAURENT JIBUNGENo ratings yet
- Unit I - Force Analysis (9) : Systems and Tribology ConceptDocument82 pagesUnit I - Force Analysis (9) : Systems and Tribology ConceptSaranNo ratings yet
- 11-3 Dynamic AnalysisDocument28 pages11-3 Dynamic AnalysisRafli NaufalNo ratings yet
- 2 Bending StressesDocument20 pages2 Bending StressesKALYANE SATYAM SANJAYNo ratings yet
- Investigation of Torsion Springs by Considering The Friction and The End EffectDocument6 pagesInvestigation of Torsion Springs by Considering The Friction and The End EffectSuresh KumarNo ratings yet
- Lab Manual - 1Document43 pagesLab Manual - 1Nabeel AhmedNo ratings yet
- Buckling of Long, Regular TrussesDocument12 pagesBuckling of Long, Regular TrussesnctfatNo ratings yet
- ME-329 - Mechanical Vibrations: Dated: 16 March, 2021Document41 pagesME-329 - Mechanical Vibrations: Dated: 16 March, 2021Muhammad Junaid JahangirNo ratings yet
- Chapter 4 - Analysis of Structures Using Strain - Energy MethodDocument10 pagesChapter 4 - Analysis of Structures Using Strain - Energy MethodTebello LetsoaloNo ratings yet
- en Circular Motion With Conical PendulumDocument4 pagesen Circular Motion With Conical PendulumRiot ChinNo ratings yet
- 8PCEE PaperDocument9 pages8PCEE PaperGirish MaluNo ratings yet
- Theory of Machines - LabSheetDocument20 pagesTheory of Machines - LabSheetBitzerNo ratings yet
- Sarbast Osman Mero Nawroz UniversityDocument8 pagesSarbast Osman Mero Nawroz UniversityMd Shahroz AlamNo ratings yet
- ENGG1400 Statics Worked Examples 2020Document112 pagesENGG1400 Statics Worked Examples 2020naidee fitzNo ratings yet
- LIU Jiemin @SJZU 2008 1 CH.2 Tension & COMPRESSIONDocument45 pagesLIU Jiemin @SJZU 2008 1 CH.2 Tension & COMPRESSIONPriyanka CholletiNo ratings yet
- Statics of Rigid Bodies GuideDocument7 pagesStatics of Rigid Bodies GuideZerah AndradeNo ratings yet
- Unit-1 - Static Force AnalysisDocument36 pagesUnit-1 - Static Force AnalysisHareesha N G0% (1)
- Rolling Contact BearingsDocument79 pagesRolling Contact BearingssnoozermanNo ratings yet
- Roll Center MysteryDocument7 pagesRoll Center MysteryMrudula Amar WardeNo ratings yet
- Module 5: Equilibrium of Two Dimensional Coplanar Forces TopicsDocument8 pagesModule 5: Equilibrium of Two Dimensional Coplanar Forces TopicsBeverly Ann GonzalesNo ratings yet
- ME1222 - 4. Equilibrium of Rigid BodiesDocument23 pagesME1222 - 4. Equilibrium of Rigid Bodies40-eng-0003No ratings yet
- Mom 16Document24 pagesMom 16Najwan AzitNo ratings yet
- IMs Eng Mechanics ENSC 20143 1ST SEM 21 22 1 3Document37 pagesIMs Eng Mechanics ENSC 20143 1ST SEM 21 22 1 3JON MANNo ratings yet
- 8-Fuel CellsDocument28 pages8-Fuel CellsMohammed Al-OdatNo ratings yet
- 7-Salinity GradientDocument22 pages7-Salinity GradientMohammed Al-OdatNo ratings yet
- 13-Cold Fusion and Gravitational EnergyDocument28 pages13-Cold Fusion and Gravitational EnergyMohammed Al-OdatNo ratings yet
- 16 ObservationsDocument24 pages16 ObservationsMohammed Al-OdatNo ratings yet
- 4 Heat Transfer and StorageDocument16 pages4 Heat Transfer and StorageMohammed Al-OdatNo ratings yet
- 08 NuclearDocument62 pages08 NuclearMohammed Al-OdatNo ratings yet
- Renewable: EnergyDocument38 pagesRenewable: EnergyMohammed Al-OdatNo ratings yet
- Crude Oil CharacteristicsDocument13 pagesCrude Oil CharacteristicsMohammed Al-OdatNo ratings yet
- Energy: W F D, Joule (J) Newton (N) Meter (M)Document26 pagesEnergy: W F D, Joule (J) Newton (N) Meter (M)Mohammed Al-OdatNo ratings yet
- Energy Conservation OutlineDocument8 pagesEnergy Conservation OutlineMohammed Al-OdatNo ratings yet
- 17 FuelCellsDocument57 pages17 FuelCellsMohammed Al-OdatNo ratings yet
- Course Introduction Today's ClassDocument36 pagesCourse Introduction Today's ClassMohammed Al-OdatNo ratings yet
- Properties and Testing of CoalDocument13 pagesProperties and Testing of CoalMohammed Al-OdatNo ratings yet
- Wind Turbine L9+L10 RevisedDocument111 pagesWind Turbine L9+L10 RevisedMohammed Al-OdatNo ratings yet
- Introduction To Wind Energy: James Mccalley Honors 322W, Wind Energy Honors SeminarDocument28 pagesIntroduction To Wind Energy: James Mccalley Honors 322W, Wind Energy Honors SeminarMohammed Al-OdatNo ratings yet
- Wind Turbine L25-L26 RevisedDocument137 pagesWind Turbine L25-L26 RevisedMohammed Al-OdatNo ratings yet
- Energy and EnvoiromentDocument38 pagesEnergy and EnvoiromentMohammed Al-OdatNo ratings yet
- Fuel and Its CharacteristicsDocument42 pagesFuel and Its CharacteristicsMohammed Al-OdatNo ratings yet
- Part 6 - Energy From Fossil FuelsDocument34 pagesPart 6 - Energy From Fossil FuelsMohammed Al-OdatNo ratings yet
- Infracal Tog/Tph Analyzers For Oil and Grease MeasurementsDocument43 pagesInfracal Tog/Tph Analyzers For Oil and Grease MeasurementsMohammed Al-OdatNo ratings yet
- Fuel and Its Characteristics: Prof. Mohammed Al-OdatDocument43 pagesFuel and Its Characteristics: Prof. Mohammed Al-OdatMohammed Al-OdatNo ratings yet
- Jordan Energy Strategy: - Renewable Energy Program & PolicyDocument20 pagesJordan Energy Strategy: - Renewable Energy Program & PolicyMohammed Al-OdatNo ratings yet
- Coal Characteristics محفلا صئاصخDocument28 pagesCoal Characteristics محفلا صئاصخMohammed Al-OdatNo ratings yet
- Realities of Nuclear EnergyDocument36 pagesRealities of Nuclear EnergyMohammed Al-OdatNo ratings yet
- Dohc Engine Mechanical: SpecificationsDocument5 pagesDohc Engine Mechanical: SpecificationsAlejandro Muñoz PatiñoNo ratings yet
- Maintenance Slide Gate Manually Operated: Machine Manual En-23122.202-ADocument22 pagesMaintenance Slide Gate Manually Operated: Machine Manual En-23122.202-ARahmat YusufNo ratings yet
- Council House 2 (Ch2) in Review: Matthew Hoogland DR Paul BannisterDocument14 pagesCouncil House 2 (Ch2) in Review: Matthew Hoogland DR Paul BannisterMohamed AdelNo ratings yet
- Sinopec Piping Class 2009Document137 pagesSinopec Piping Class 2009Ariel HughesNo ratings yet
- Flow Separation or Boundary Layer Separation IsDocument4 pagesFlow Separation or Boundary Layer Separation Isengineer bilalNo ratings yet
- Cutting Nozzles: Propane Nozzle Mix - PNM and PNM-E (Extended)Document1 pageCutting Nozzles: Propane Nozzle Mix - PNM and PNM-E (Extended)Dries VandezandeNo ratings yet
- NASGRO® Software Overview - Southwest Research InstituteDocument3 pagesNASGRO® Software Overview - Southwest Research InstituteVysakh VasudevanNo ratings yet
- Government Polytechnic, Ambad.: Course & Code: Electrical Motors & TRANSFORMERS/22418 ACADEMIC YEAR-2022-23Document11 pagesGovernment Polytechnic, Ambad.: Course & Code: Electrical Motors & TRANSFORMERS/22418 ACADEMIC YEAR-2022-23Shivam ShindeNo ratings yet
- AN002 Application Note: What Is A Quaternion?Document3 pagesAN002 Application Note: What Is A Quaternion?kirancallsNo ratings yet
- Drive Belt Spec QSK45 and QSK60Document2 pagesDrive Belt Spec QSK45 and QSK60andrianusmathius.uNo ratings yet
- Abnormalities and Failures of Rolling Mill Rolls - SRSCDocument11 pagesAbnormalities and Failures of Rolling Mill Rolls - SRSCBoban RajkovicNo ratings yet
- VF66B - Auto Tuning Procedure-Vol4Document7 pagesVF66B - Auto Tuning Procedure-Vol4BGM EngineerNo ratings yet
- B 474 - 99 Qjq3nc05oqDocument5 pagesB 474 - 99 Qjq3nc05oqMarceloNo ratings yet
- 15bch027 P&id MainDocument1 page15bch027 P&id MainMayur ParmarNo ratings yet
- Lec 6Document11 pagesLec 6haricoolestNo ratings yet
- Bare KitDocument5 pagesBare Kitct1uan9aNo ratings yet
- Automatic Tyre Inflation SystemDocument32 pagesAutomatic Tyre Inflation SystemSanjana Singh50% (2)
- Dry Condenser Cooling Systems For Thermal Power StationsDocument24 pagesDry Condenser Cooling Systems For Thermal Power StationsBabis PapadopoulosNo ratings yet
- Manual de Partes GR110 - SERIE S99150201 PDFDocument101 pagesManual de Partes GR110 - SERIE S99150201 PDFJerson Portocarrero100% (1)
- Machined Springs Vs Wire Springs PDFDocument22 pagesMachined Springs Vs Wire Springs PDFsaranNo ratings yet
- Investigation of Burners For Different Investigation of Regenerative and Recuperative Ifferent Sizes of Reheating Ecuperative Eheating FurnacesDocument5 pagesInvestigation of Burners For Different Investigation of Regenerative and Recuperative Ifferent Sizes of Reheating Ecuperative Eheating FurnacesAlvin AdamNo ratings yet
- Intro Stepper PDFDocument44 pagesIntro Stepper PDFHansean WidjajaNo ratings yet
- J Fluids Engineering 2009 Vol 131 N6Document121 pagesJ Fluids Engineering 2009 Vol 131 N6Нильва Александр100% (1)
- Style 2971: Aquamine Plain-End PVC To HDPE Transition CouplingDocument2 pagesStyle 2971: Aquamine Plain-End PVC To HDPE Transition Couplinglgv2No ratings yet
- TA Allocation Spring2024 ME3Document4 pagesTA Allocation Spring2024 ME3raja krNo ratings yet
- Materials - Corrosion and Corrosion AllowanceDocument6 pagesMaterials - Corrosion and Corrosion Allowancerajiv_quantum100% (1)
- Eng TP ServiceDocument13 pagesEng TP ServicesmotNo ratings yet
- ANNA UNIVERSITY Dts Two MarkDocument7 pagesANNA UNIVERSITY Dts Two MarkkarthisanNo ratings yet