Download as pptx, pdf, or txt
You might also like
- InstructionDocument14 pagesInstructionskipina74No ratings yet
- Reg EngDocument14 pagesReg EngMihai-Petru PavelescuNo ratings yet
- Installation Description For Mini - RobotDocument2 pagesInstallation Description For Mini - RobotterRer91No ratings yet
- Ultrasonic Sensor Distance MeasuringDocument25 pagesUltrasonic Sensor Distance Measuringjunaidadil100% (1)
- User Manual Otdr HSV-600Document35 pagesUser Manual Otdr HSV-600Andrew SolanoNo ratings yet
- Service Manual: TX-SR607 (B/S/G)Document128 pagesService Manual: TX-SR607 (B/S/G)Coso Moto100% (1)
- Object Locator: Reference ManualDocument6 pagesObject Locator: Reference ManualCarlos MoraNo ratings yet
- Metrahit Im Serie Ba - GB - 8Document1 pageMetrahit Im Serie Ba - GB - 8TonyNo ratings yet
- Display & Terminal Details 7.3Document17 pagesDisplay & Terminal Details 7.3Ibrahim Ben AmeurNo ratings yet
- Experiment 20: infrared remote control: 1、Infrared receiving head introductionDocument8 pagesExperiment 20: infrared remote control: 1、Infrared receiving head introductionSahbi Marrouchi100% (1)
- DComm FileDocument51 pagesDComm FileSamriddhi JainNo ratings yet
- Asg 1Document12 pagesAsg 1my323No ratings yet
- Sugarbaby Watermelon Ripeness Detector Ecem - 513: ProponentsDocument33 pagesSugarbaby Watermelon Ripeness Detector Ecem - 513: ProponentsJunior ParagasNo ratings yet
- Up15000 ManDocument38 pagesUp15000 ManAmin khajeansariNo ratings yet
- CHI MEI Pt650d Instruction ManualDocument63 pagesCHI MEI Pt650d Instruction ManualBalanças EstaticaNo ratings yet
- IR Senor Obstacle Avoidance Keyes KY 032Document6 pagesIR Senor Obstacle Avoidance Keyes KY 032Andy ZhuNo ratings yet
- IoT Lab ManualDocument60 pagesIoT Lab ManualSH GamingNo ratings yet
- General Description: PT650F Instruction Manual 1Document10 pagesGeneral Description: PT650F Instruction Manual 1AbubackerNo ratings yet
- PT650f e 2002Document67 pagesPT650f e 2002lehahai100% (4)
- DT 1309 ManualDocument15 pagesDT 1309 ManualJaime Alberto Montoya TejadaNo ratings yet
- AT070TN01Document18 pagesAT070TN01dolhamirNo ratings yet
- Lunar-50-R English2 0Document7 pagesLunar-50-R English2 0futuremedNo ratings yet
- Kontrol 40 PH Redox ManualDocument12 pagesKontrol 40 PH Redox Manualgeorge pakamase100% (1)
- PDD Functionnal OverviewDocument6 pagesPDD Functionnal OverviewtarsudinNo ratings yet
- RADAR FURUNO FAR-2107-2807 (Performance Monitor)Document2 pagesRADAR FURUNO FAR-2107-2807 (Performance Monitor)kristobalkomonNo ratings yet
- Infrared Headlights: Page 236 Robotics With The Boe-BotDocument6 pagesInfrared Headlights: Page 236 Robotics With The Boe-BotJeff MburuNo ratings yet
- Triggering A Relay With An Hc-Sr04 Ultrasonic Sensor: CS 11/group - 4 - Borromeo, Galanida, Pabilan, Paypa, TejeroDocument8 pagesTriggering A Relay With An Hc-Sr04 Ultrasonic Sensor: CS 11/group - 4 - Borromeo, Galanida, Pabilan, Paypa, TejeroGladys Ruth PaypaNo ratings yet
- DS201 Manual V32Document17 pagesDS201 Manual V32BenoitDeCoomanNo ratings yet
- EDR-5000-2 Profibus Datapoints V3.0Document17 pagesEDR-5000-2 Profibus Datapoints V3.0Andes PutraNo ratings yet
- ESD NPTEL SummaryDocument35 pagesESD NPTEL SummaryrahulpikaleNo ratings yet
- Lec 3bit Operation and ManipulationDocument7 pagesLec 3bit Operation and ManipulationAhmed MoosaniNo ratings yet
- Arduino Lab Manual AkshatDocument18 pagesArduino Lab Manual AkshatvinitaveeraniNo ratings yet
- ITM 12864K0 TecnicoDocument24 pagesITM 12864K0 TecnicoThiago A. OliveiraNo ratings yet
- GV3 Regulador de Ponto Pra GNVDocument23 pagesGV3 Regulador de Ponto Pra GNVmanishNo ratings yet
- Practical 1Document79 pagesPractical 1Tejas FattewaleNo ratings yet
- Build A Cheap Oscilloscope and Sensor Probes For Physics Experiments in SchoolDocument45 pagesBuild A Cheap Oscilloscope and Sensor Probes For Physics Experiments in SchooltecsupportNo ratings yet
- 1/16 DIN (48 48 MM) Temperature Controller: FeaturesDocument7 pages1/16 DIN (48 48 MM) Temperature Controller: FeaturesAditya Y. NovitasariNo ratings yet
- DHT-11-Temp-Humidity SensingDocument3 pagesDHT-11-Temp-Humidity SensingRohit GholapNo ratings yet
- CS2290 Quick Guide - V1.1Document2 pagesCS2290 Quick Guide - V1.1Eldar Sefić (Orhanon144Hz)No ratings yet
- AE3100 Series User ManualV1.06-deviserDocument35 pagesAE3100 Series User ManualV1.06-deviserGerardo AbregoNo ratings yet
- Keyes - Infrared Receiver and Transmitter ModuleDocument9 pagesKeyes - Infrared Receiver and Transmitter ModulePedro MorrisNo ratings yet
- Lec 8 NotesDocument9 pagesLec 8 NotesAlan BensonNo ratings yet
- Experiment 7Document9 pagesExperiment 7abstudio0049No ratings yet
- Vacon CX Multi Purpose II Application Manual Ud182D enDocument52 pagesVacon CX Multi Purpose II Application Manual Ud182D enStancu BranNo ratings yet
- IR Sensor Infrared Obstacle Sensor Module Has Builtin IR Transmitter and IR Receiver That Sends Out IR Energy and Looks ForDocument12 pagesIR Sensor Infrared Obstacle Sensor Module Has Builtin IR Transmitter and IR Receiver That Sends Out IR Energy and Looks ForRavi RajanNo ratings yet
- 03 Downstream GFB Series Operation ManualDocument12 pages03 Downstream GFB Series Operation ManualDamian VillarNo ratings yet
- FinalDocument38 pagesFinalSree LakshmiNo ratings yet
- ESD NPTEL SummaryDocument47 pagesESD NPTEL SummaryrahulpikaleNo ratings yet
- Fast Charge Controller For Nicd/Nimh Batteries: DescriptionDocument17 pagesFast Charge Controller For Nicd/Nimh Batteries: DescriptioncorticalisNo ratings yet
- Aumatic Control Unit: Aumund Fördertechnik GMBHDocument7 pagesAumatic Control Unit: Aumund Fördertechnik GMBHBruno SantosNo ratings yet
- PR40 ManDocument79 pagesPR40 ManGuzmanNo ratings yet
- Controller - Heater - AC Control Unit ( (Full Automatic)Document5 pagesController - Heater - AC Control Unit ( (Full Automatic)Trường ThiNo ratings yet
- 04 GSB242BII Operation ManualDocument10 pages04 GSB242BII Operation ManualDamian VillarNo ratings yet
- Lab 4Document2 pagesLab 4Anthonio MakafuiNo ratings yet
- Eds 8000Document16 pagesEds 8000Gustavo AngelNo ratings yet
- Proximity Sensor For Arduino MCU Using 555 Timer IDocument7 pagesProximity Sensor For Arduino MCU Using 555 Timer IlasobereNo ratings yet
- s26 at of SDH System - Tsdhatt001Document32 pagess26 at of SDH System - Tsdhatt001vlamlt2008No ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Making PIC Microcontroller Instruments and ControllersFrom EverandMaking PIC Microcontroller Instruments and ControllersNo ratings yet
- CH 1 - Music Appreciation For The 21st CenturyDocument8 pagesCH 1 - Music Appreciation For The 21st Century周瑞濬No ratings yet
- Programming Concepts: (Part B)Document52 pagesProgramming Concepts: (Part B)周瑞濬No ratings yet
- Programing Concept: (Part A)Document36 pagesPrograming Concept: (Part A)周瑞濬No ratings yet
- hw2 SolnDocument3 pageshw2 Soln周瑞濬No ratings yet
- hw1 SolnDocument3 pageshw1 Soln周瑞濬No ratings yet
- MAN12384-11, Installation Manual For RDI 08-001SJ in Outer CabinetDocument8 pagesMAN12384-11, Installation Manual For RDI 08-001SJ in Outer CabinetMayurNo ratings yet
- Cuddle N Care Rocking Bassinet - KB063 - InstructionsDocument36 pagesCuddle N Care Rocking Bassinet - KB063 - Instructionsgemabags.maNo ratings yet
- Design and Simulation of Dual Band Planar Inverted F Antenna (PIFA) For Mobile Handset ApplicationsDocument12 pagesDesign and Simulation of Dual Band Planar Inverted F Antenna (PIFA) For Mobile Handset ApplicationsjantjournalNo ratings yet
- Evsjv 'K Kvwimwi WK V Evw©: Website: WWW - Bteb.Gov - BDDocument58 pagesEvsjv 'K Kvwimwi WK V Evw©: Website: WWW - Bteb.Gov - BDAbdus samad ChowdhuryNo ratings yet
- IV Year B.Tech. ECE - II Semester Cellular and Mobile CommunicationsDocument20 pagesIV Year B.Tech. ECE - II Semester Cellular and Mobile Communicationsdini9491No ratings yet
- Patent No. US3393279 NERVOUS SYSTEM EXCITATION DEVICE by Gillis Patrick FlanaganDocument4 pagesPatent No. US3393279 NERVOUS SYSTEM EXCITATION DEVICE by Gillis Patrick Flanaganpepixx985No ratings yet
- Tesla Patent Apparatus For Transmission of Electrical EnergyDocument4 pagesTesla Patent Apparatus For Transmission of Electrical EnergyUmair MansoorNo ratings yet
- Daftar Stasiun Radio Di JakartaDocument1 pageDaftar Stasiun Radio Di Jakartadjarot2007No ratings yet
- Ramko Research DML-2Document2 pagesRamko Research DML-2Adam MuntnerNo ratings yet
- Flight Reference Card Tarot 680 Pro: Airborne Geosciences Facility (Uoe-Ag)Document24 pagesFlight Reference Card Tarot 680 Pro: Airborne Geosciences Facility (Uoe-Ag)Manolo PhintoNo ratings yet
- Satlinker, Link-Budget Calculator: Program HandlingDocument3 pagesSatlinker, Link-Budget Calculator: Program HandlingRajaNo ratings yet
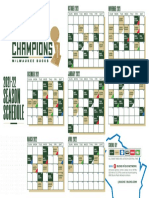
- 2021-22 Milwaukee Bucks ScheduleDocument1 page2021-22 Milwaukee Bucks ScheduleTMJ4 NewsNo ratings yet
- OFDM MatlabDocument49 pagesOFDM MatlabBiplab Roy100% (1)
- Measurement-Based CSFB Target Selection PDFDocument18 pagesMeasurement-Based CSFB Target Selection PDFsepidehNo ratings yet
- (VX-110) Expanded Transmit For The Vertex VX-110 & VX-150Document7 pages(VX-110) Expanded Transmit For The Vertex VX-110 & VX-150Damian GonzaNo ratings yet
- Cep, Ecd2020Document2 pagesCep, Ecd2020Osama Asghar100% (1)
- 6352 Installation GuidelineDocument13 pages6352 Installation GuidelineRoberto EmmeNo ratings yet
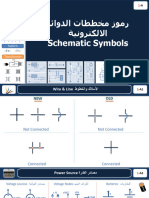
- Electronic Symbols - 1.2.3.4 رموز العناصر الألكترونيةDocument33 pagesElectronic Symbols - 1.2.3.4 رموز العناصر الألكترونيةAli DjemNo ratings yet
- SMX Range: Operating InstructionsDocument28 pagesSMX Range: Operating InstructionsFerran Ros SendraNo ratings yet
- Smart Bias Tee - 7-16Document3 pagesSmart Bias Tee - 7-16Vasile IonNo ratings yet
- Design, Analysis, and Performance Evaluation For BICM-ID With Square QAM Constellations in Rayleigh Fading ChannelsDocument14 pagesDesign, Analysis, and Performance Evaluation For BICM-ID With Square QAM Constellations in Rayleigh Fading ChannelsSimon TarboucheNo ratings yet
- Distribution Receiver: Product Overview Base Unit FeaturesDocument3 pagesDistribution Receiver: Product Overview Base Unit FeaturesfrankmeersNo ratings yet
- IO-WRP Installation Operation Manual 2Document4 pagesIO-WRP Installation Operation Manual 2David RiveraNo ratings yet
- Phonetic Alphabet: Maria Fernanda Torres Montaño Harold Stephen Peña TamayoDocument8 pagesPhonetic Alphabet: Maria Fernanda Torres Montaño Harold Stephen Peña TamayoOscar SanchezNo ratings yet
- Mobile Phone: Service ManualDocument128 pagesMobile Phone: Service ManualsamuelNo ratings yet
- Public Address & General Alarm SystemDocument50 pagesPublic Address & General Alarm Systemvu minh tienNo ratings yet
- Kpi2 PDFDocument140 pagesKpi2 PDFSouleymane KoussoubeNo ratings yet
- Self-Organizing Interference Coordination For Future Lte-Advanced Network Qos ImprovementsDocument6 pagesSelf-Organizing Interference Coordination For Future Lte-Advanced Network Qos Improvementssolarisan6No ratings yet
- President Grant - 2 - Asc PR Radio Service ManualDocument54 pagesPresident Grant - 2 - Asc PR Radio Service ManualAsgeir CB KolsrudNo ratings yet
- WAMU 88.5 Community Council Meeting Minutes Feb 2021Document4 pagesWAMU 88.5 Community Council Meeting Minutes Feb 2021wamu885No ratings yet