Download as pptx, pdf, or txt
You might also like
- Sedimentary Rocks Pettijohn 2edDocument776 pagesSedimentary Rocks Pettijohn 2edGiovanna HdzNo ratings yet
- Uebung CAEDocument7 pagesUebung CAERiddhijit ChattopadhyayNo ratings yet
- Mary Ann Doane - Stillness + Time 22-38Document9 pagesMary Ann Doane - Stillness + Time 22-38MargaridaMedeiros100% (1)
- Digital Logic ReviewDocument16 pagesDigital Logic Reviewsara_loloNo ratings yet
- Process Control 5Document21 pagesProcess Control 5Mohamad AbdelkaderNo ratings yet
- Computer Graphic - Chapter 04Document100 pagesComputer Graphic - Chapter 04Minh NguyenNo ratings yet
- FandI - CT6 - 200909 - Examiners' ReportDocument11 pagesFandI - CT6 - 200909 - Examiners' ReportUrvi purohitNo ratings yet
- CSL7450 C8Document12 pagesCSL7450 C8Chirag (B19CSE026)No ratings yet
- 05-Inverse Manipulator Kinematics: Doan The ThaoDocument47 pages05-Inverse Manipulator Kinematics: Doan The ThaoThảo DươngNo ratings yet
- The Microoperations Most Often Encountered in Digital Computers Are Classified Into Four CategoriesDocument16 pagesThe Microoperations Most Often Encountered in Digital Computers Are Classified Into Four CategoriessouravNo ratings yet
- Vector in Computer GraphicsDocument52 pagesVector in Computer GraphicsThong PhanNo ratings yet
- Applied Mathematics and Computation: Feng-Gong Lang, Xiao-Ping XuDocument8 pagesApplied Mathematics and Computation: Feng-Gong Lang, Xiao-Ping XuMaiah DinglasanNo ratings yet
- Exam RT2 2015 SummerDocument7 pagesExam RT2 2015 SummerLuis CarvalhoNo ratings yet
- Control Systems Theory and Design: ExaminationDocument7 pagesControl Systems Theory and Design: ExaminationLuis CarvalhoNo ratings yet
- Lab 3 DLDDocument5 pagesLab 3 DLDBARKAT AliNo ratings yet
- Chapter 04Document68 pagesChapter 04kndnew guadeNo ratings yet
- Optimal Control Designs For Systems With Input Saturations and Rate LimitersDocument4 pagesOptimal Control Designs For Systems With Input Saturations and Rate Limitersmousa bagherpourjahromiNo ratings yet
- Lab Journal 3 30032024 104144pmDocument7 pagesLab Journal 3 30032024 104144pmMuhammad bilalNo ratings yet
- Binary Adders and SubtractorsDocument22 pagesBinary Adders and SubtractorsGautamNo ratings yet
- Analysis & Synthesis of Digital Logic Circuits: Dr. Sampad GhoshDocument22 pagesAnalysis & Synthesis of Digital Logic Circuits: Dr. Sampad GhoshMortuzaNo ratings yet
- Lab 15Document5 pagesLab 15bscs23196No ratings yet
- Mitu SikaDocument11 pagesMitu SikaNishat FarjanaNo ratings yet
- Princess Sumaya Univ.: Computer Engineering DeptDocument27 pagesPrincess Sumaya Univ.: Computer Engineering Deptsyed_umar_aminNo ratings yet
- Lecture 8: Synchronous Digital Systems: DOC112: Computer Hardware Lecture 8 1Document6 pagesLecture 8: Synchronous Digital Systems: DOC112: Computer Hardware Lecture 8 1rinobiNo ratings yet
- 3d Kinematics Project Design ProposalDocument3 pages3d Kinematics Project Design Proposalapi-498581806No ratings yet
- Projective Geometry-2d: AcknowledgementsDocument13 pagesProjective Geometry-2d: AcknowledgementsRaleGarfildNo ratings yet
- VLSI and ASIC Examples of Physical LayoutDocument6 pagesVLSI and ASIC Examples of Physical LayoutFrankNguyen2702No ratings yet
- Instant Download PDF Digital Information Age An Introduction To Electrical Engineering 2nd Edition Roman Kuc Solutions Manual Full ChapterDocument36 pagesInstant Download PDF Digital Information Age An Introduction To Electrical Engineering 2nd Edition Roman Kuc Solutions Manual Full Chapterdajerabead5100% (3)
- Introduction To ROBOTICSDocument35 pagesIntroduction To ROBOTICSVistor VondarthNo ratings yet
- Introduction To Modeling: Chen: Jchen@cs - Gmu.edu 1Document33 pagesIntroduction To Modeling: Chen: Jchen@cs - Gmu.edu 1api-343773957No ratings yet
- Class Notes, Trajectory Planning, COMS4733: 1 TrajectoriesDocument11 pagesClass Notes, Trajectory Planning, COMS4733: 1 TrajectoriesAustin Tyson DsouzaNo ratings yet
- Lecture 12Document20 pagesLecture 12ankiosaNo ratings yet
- Eorms0111Document6 pagesEorms0111anamavalenciNo ratings yet
- A Review of Edge-Based 3D Tracking of Rigid ObjectsDocument17 pagesA Review of Edge-Based 3D Tracking of Rigid ObjectsPawankumar GuravNo ratings yet
- EEB 551 Lab 2Document11 pagesEEB 551 Lab 2Chiko KheruNo ratings yet
- Critical Clearing Angle and Critical Clearing Time:-: Rohini College of Engineering & TechnologyDocument5 pagesCritical Clearing Angle and Critical Clearing Time:-: Rohini College of Engineering & TechnologyLoknathNo ratings yet
- Lesson 8 VC.06 Day2Document16 pagesLesson 8 VC.06 Day2Sri RaghavanNo ratings yet
- Lecture Rehersal PTITDocument18 pagesLecture Rehersal PTITNguyen HauNo ratings yet
- Combinational Circuits: Design Methods/Arithmetic Circuits: Analysis Procedure Design Methods Gate-Level (SSI) DesignDocument63 pagesCombinational Circuits: Design Methods/Arithmetic Circuits: Analysis Procedure Design Methods Gate-Level (SSI) DesignPSNo ratings yet
- Viewing A Code From An Extension Field: 1 Z Z Z 2 GF 8 GFDocument12 pagesViewing A Code From An Extension Field: 1 Z Z Z 2 GF 8 GFtakahashikeyakiNo ratings yet
- D Latch - D Flip-FlopDocument4 pagesD Latch - D Flip-FlopshitNo ratings yet
- Digital Control - Part Ii: Mieec, Deec, FeupDocument49 pagesDigital Control - Part Ii: Mieec, Deec, FeupDdnunodd NndanielnnNo ratings yet
- Mixed Boundary Conditions in Heat ConductionDocument3 pagesMixed Boundary Conditions in Heat Conductionmoustafa hadj-doulaNo ratings yet
- Robotic Systems - Trajectory Planning: Paolo Di LilloDocument26 pagesRobotic Systems - Trajectory Planning: Paolo Di LilloEbaneo VkNo ratings yet
- AST Exam WiSe 2021 22 Sample SolutionsDocument19 pagesAST Exam WiSe 2021 22 Sample SolutionsRehman SaleemNo ratings yet
- EC60501 Digital Image Processing MA 2016Document2 pagesEC60501 Digital Image Processing MA 2016kingnaidu546No ratings yet
- Mathematical Models For Facility Location: Prof Arun Kanda Department of Mech Engg Indian Institute of Technology, DelhiDocument28 pagesMathematical Models For Facility Location: Prof Arun Kanda Department of Mech Engg Indian Institute of Technology, DelhiEusbesio McvarroNo ratings yet
- K Maps2Document25 pagesK Maps2Christina josephine malathiNo ratings yet
- Cal2 Chapter5 Handout2023Document72 pagesCal2 Chapter5 Handout2023quynhNo ratings yet
- JALWIN CPE301 MidtermExamDocument3 pagesJALWIN CPE301 MidtermExamSiegrique Ceasar A. JalwinNo ratings yet
- Design of The Deadbeat Controller With Limited Output: L. Balasevicius, G. DervinisDocument4 pagesDesign of The Deadbeat Controller With Limited Output: L. Balasevicius, G. DervinisASHOK KRNo ratings yet
- 1 Plane Geometric ProjectionsDocument6 pages1 Plane Geometric ProjectionsArvind RawatNo ratings yet
- Automatic Control III Homework Assignment 3 2015Document4 pagesAutomatic Control III Homework Assignment 3 2015salimNo ratings yet
- Assignment1 CCCN212Document2 pagesAssignment1 CCCN212Asma AlnounouNo ratings yet
- Cad 18Document30 pagesCad 18Priyakrishnan SenthilNo ratings yet
- Dynamic ' Reconstruction: Justin Romberg Georgia Tech, ECE Collaborators: M. Salman Asif Aur' Ele Balavoine Chris RozellDocument53 pagesDynamic ' Reconstruction: Justin Romberg Georgia Tech, ECE Collaborators: M. Salman Asif Aur' Ele Balavoine Chris RozellAshwani SinghNo ratings yet
- 34-Design of Synchronous Counters-24!03!2023Document17 pages34-Design of Synchronous Counters-24!03!2023Back upNo ratings yet
- Combinational Logic Circuit: University of Perpetual Help System DaltaDocument17 pagesCombinational Logic Circuit: University of Perpetual Help System DaltaJohn Kenneth BulabosNo ratings yet
- Walczak Projectile MotionDocument13 pagesWalczak Projectile MotionSingh JiNo ratings yet
- Unit 2 - Digital SystemsDocument20 pagesUnit 2 - Digital SystemsnaactitexcellenceNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Mathematical Formulas for Economics and Business: A Simple IntroductionFrom EverandMathematical Formulas for Economics and Business: A Simple IntroductionRating: 4 out of 5 stars4/5 (4)
- Computer Graphics: Lighting and ShadingDocument50 pagesComputer Graphics: Lighting and ShadingThong PhanNo ratings yet
- Computer Graphics: RasterizationDocument80 pagesComputer Graphics: RasterizationThong PhanNo ratings yet
- Chapter 07Document68 pagesChapter 07Thong PhanNo ratings yet
- Vector in Computer GraphicsDocument52 pagesVector in Computer GraphicsThong PhanNo ratings yet
- Computer Graphics: 3D Object & MeshDocument40 pagesComputer Graphics: 3D Object & MeshThong PhanNo ratings yet
- UG Syllabus B.tech 1stDocument12 pagesUG Syllabus B.tech 1stRaunak GuptaNo ratings yet
- Confliect Management - Ogl 220 - ArtifactDocument5 pagesConfliect Management - Ogl 220 - Artifactapi-720145281No ratings yet
- A Review of Passive Micromixers With A ComparativeDocument25 pagesA Review of Passive Micromixers With A ComparativeSadia SiddiqaNo ratings yet
- ICH GuidelinesDocument28 pagesICH GuidelinesSiddhant BanwatNo ratings yet
- Economic and Globalization and The EnvironmentDocument15 pagesEconomic and Globalization and The EnvironmentReynaldo Jr BatacNo ratings yet
- SUBMITTED-full - TRUESOILDocument103 pagesSUBMITTED-full - TRUESOILAndi Alfi SyahrinNo ratings yet
- Beyond Being Human Profile Oct 2023Document8 pagesBeyond Being Human Profile Oct 2023Michael NeyNo ratings yet
- ENGL 102 Mixed Tense Exercises (8 Tenses)Document22 pagesENGL 102 Mixed Tense Exercises (8 Tenses)na-labbadNo ratings yet
- Manual Instruction For Propeller Fan (APL-APN)Document4 pagesManual Instruction For Propeller Fan (APL-APN)Adi HardiansyahNo ratings yet
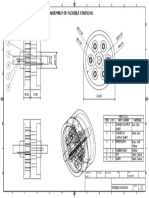
- Flexible Coupling AssemblyDocument1 pageFlexible Coupling AssemblybluebirdNo ratings yet
- WMC SyllabusDocument3 pagesWMC SyllabusMona AggarwalNo ratings yet
- Tech NewsletterDocument43 pagesTech NewsletterTaha AhmedNo ratings yet
- Hydraulic Fluid Purpose & Properties: (Chapter 2)Document29 pagesHydraulic Fluid Purpose & Properties: (Chapter 2)christodoulos charalambousNo ratings yet
- Automelt S33Document2 pagesAutomelt S33gopuvinu4uNo ratings yet
- Design Optimization of Gating and FeedinDocument9 pagesDesign Optimization of Gating and FeedinJoao LuisNo ratings yet
- Đề Thi Vào 10 - Bến TreDocument5 pagesĐề Thi Vào 10 - Bến TreMinh NguyễnNo ratings yet
- Lesson 6 Minerals and Rocks S11 12ES Ia 9Document8 pagesLesson 6 Minerals and Rocks S11 12ES Ia 9Christine CayosaNo ratings yet
- Brushless DC Motor Project in An Introduction To Electrical Engineering Course PDFDocument9 pagesBrushless DC Motor Project in An Introduction To Electrical Engineering Course PDFArturoDellaMadalenaNo ratings yet
- Benchmarking and Learning Organizations: Ranking Methods To Identify "Best in Class"Document10 pagesBenchmarking and Learning Organizations: Ranking Methods To Identify "Best in Class"Madlen MadlenNo ratings yet
- Northern Lights - 7 Best Places To See The Aurora Borealis in 2022Document15 pagesNorthern Lights - 7 Best Places To See The Aurora Borealis in 2022labendetNo ratings yet
- CH 3 OBDocument15 pagesCH 3 OBBuraq FarisNo ratings yet
- Biochemistry CalculationsDocument3 pagesBiochemistry CalculationsasyaroesNo ratings yet
- Electronic Equipment 3Document4 pagesElectronic Equipment 3Dulce DeNo ratings yet
- Matlab Sheet 1 SolutionDocument8 pagesMatlab Sheet 1 SolutionLonardo WajihNo ratings yet
- 2 6 2 English L - LDocument16 pages2 6 2 English L - LAyush RajNo ratings yet
- KTG UpdatedDocument5 pagesKTG Updateddeejam123No ratings yet
- AMC12A - Đề Thi TA-TV-ĐA-2023Document15 pagesAMC12A - Đề Thi TA-TV-ĐA-2023TranhylapNo ratings yet
- QTMS Final Assessment (Spring 2020) PDFDocument6 pagesQTMS Final Assessment (Spring 2020) PDFAbdul RafayNo ratings yet