Download as pptx, pdf, or txt
You might also like
- Project-Global Temperature Change-Student GuideDocument4 pagesProject-Global Temperature Change-Student GuideAlejandro Garcia0% (1)
- Technical Manual: Cod. MTE-XFM Revision 05Document98 pagesTechnical Manual: Cod. MTE-XFM Revision 05Olexander Sim Sorok100% (5)
- La LaguneDocument35 pagesLa Lagunedoyen residential100% (1)
- Blue Yonder Inventory Optimization Solution SheetDocument2 pagesBlue Yonder Inventory Optimization Solution SheetMubeen Navaz0% (1)
- Robotics: (VII Semester, B.E. Mech)Document77 pagesRobotics: (VII Semester, B.E. Mech)maniNo ratings yet
- EE16704 UNIT5 RoboticsDocument60 pagesEE16704 UNIT5 RoboticsthamizmaniNo ratings yet
- Robotics: (VII Semester, B.Tech. Mechatronics)Document73 pagesRobotics: (VII Semester, B.Tech. Mechatronics)maxsNo ratings yet
- UNIT5 RoboticsDocument60 pagesUNIT5 RoboticsthamizmaniNo ratings yet
- Design and Analysis of Articulated Inspection Arm of Robot: International Journal For Trends in Engineering & TechnologyDocument6 pagesDesign and Analysis of Articulated Inspection Arm of Robot: International Journal For Trends in Engineering & TechnologyMoftah EddeifNo ratings yet
- Lecture 2 Basics of RoboticsDocument39 pagesLecture 2 Basics of RoboticsHui YuiNo ratings yet
- Classification of The Industrial Robot ArmsDocument6 pagesClassification of The Industrial Robot ArmsYasir AmmarNo ratings yet
- Mathew 2021 IOP Conf. Ser.: Mater. Sci. Eng. 1114 012058Document10 pagesMathew 2021 IOP Conf. Ser.: Mater. Sci. Eng. 1114 012058517wangyiqiNo ratings yet
- (2006) Modeling and Simulation of Biped Kinematics Using Bond-GraphsDocument6 pages(2006) Modeling and Simulation of Biped Kinematics Using Bond-GraphsPaul AlvarezNo ratings yet
- 03 DofDocument73 pages03 DofAhmad JordanNo ratings yet
- Design and Manufacturing of A Mobile Rescue Robot: S. Ali A. Moosavian Hesam Semsarilar Arash KalantariDocument6 pagesDesign and Manufacturing of A Mobile Rescue Robot: S. Ali A. Moosavian Hesam Semsarilar Arash KalantariPutri metapowerNo ratings yet
- EEE 1207 021 6 DOF Robotic Arm ManipulatorDocument7 pagesEEE 1207 021 6 DOF Robotic Arm ManipulatorCarlos Rodriguez RNo ratings yet
- Epe Pemc2010paperDocument4 pagesEpe Pemc2010paperBẢO Nguyễn Lê QuốcNo ratings yet
- Kinematics of RoboticsDocument63 pagesKinematics of RoboticseliasNo ratings yet
- Fiber-Reinforced ActuatorsDocument6 pagesFiber-Reinforced ActuatorsIslam HelazaNo ratings yet
- Position Control of 3R Manipulator Using The PI ControllerDocument7 pagesPosition Control of 3R Manipulator Using The PI ControllerInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Ahmad Najib 135833 - Assigment (Part DR Wan) - Eem345 ManufactDocument9 pagesAhmad Najib 135833 - Assigment (Part DR Wan) - Eem345 ManufactNajib HairiNo ratings yet
- Legged Robot Control 1Document6 pagesLegged Robot Control 1mesumNo ratings yet
- EEE 1207 021 6 DOF Robotic Arm ManipulatorDocument7 pagesEEE 1207 021 6 DOF Robotic Arm ManipulatorUNsha bee komNo ratings yet
- 48 Teleoperation of A Mobile Robot Using ADocument11 pages48 Teleoperation of A Mobile Robot Using AEmilia FeliciaNo ratings yet
- Jeong 2008Document8 pagesJeong 2008Laila AzzouziNo ratings yet
- 0620Document7 pages0620Shahrzad GhasemiNo ratings yet
- RoboticsDocument7 pagesRoboticsHenokNo ratings yet
- Robotics Lab Manual FinalDocument39 pagesRobotics Lab Manual FinalSanthosh100% (4)
- Design and Modelling of A Minimally Actuated Serial RobotDocument8 pagesDesign and Modelling of A Minimally Actuated Serial RobotVlad SimizeanuNo ratings yet
- Design and Development of One Degree of Freedom Upper Limb ExoskeletonDocument6 pagesDesign and Development of One Degree of Freedom Upper Limb ExoskeletonWarnithaNo ratings yet
- Chapter 2Document19 pagesChapter 2Aung ThikeNo ratings yet
- Dynamics 1Document37 pagesDynamics 1Rima GhoshNo ratings yet
- Growing Momentum in The Various Field of Robotics-A Review: A. Narrow Wall Climbing of Six-Legged RobotDocument9 pagesGrowing Momentum in The Various Field of Robotics-A Review: A. Narrow Wall Climbing of Six-Legged RobotYogeshPalanisamyNo ratings yet
- Dynamic Optimization and Building of A Parallel Delta-Type RobotDocument6 pagesDynamic Optimization and Building of A Parallel Delta-Type RobotANDRES RODRIGO VIDARTE RUIZNo ratings yet
- Modeling and Analysis of A 6 DOF Robotic Arm Manipulator: January 2012Document8 pagesModeling and Analysis of A 6 DOF Robotic Arm Manipulator: January 2012Bijay KumarNo ratings yet
- Introduction To Robotics and Computer VisionDocument2 pagesIntroduction To Robotics and Computer Visionbereketab mulugetaNo ratings yet
- Robotics 1Document24 pagesRobotics 1Rahul RoyNo ratings yet
- Balancing Control of A Two Wheeled Mobile Robot SystemDocument7 pagesBalancing Control of A Two Wheeled Mobile Robot SystemAbdellilah HattabNo ratings yet
- AN044 Robotic ArmDocument9 pagesAN044 Robotic Armhussien amare100% (1)
- Design of Quadruped Robot MDocument5 pagesDesign of Quadruped Robot MJai Rajesh100% (1)
- Feedback Control of A Balancing RobotDocument6 pagesFeedback Control of A Balancing RobotEsteban GutiérrezNo ratings yet
- Parallel Robots & Serial RobotsDocument6 pagesParallel Robots & Serial RobotsAhmed ElkershNo ratings yet
- Modeling and Analysis of A 6 DOF Robotic Arm Manipulator: January 2012Document8 pagesModeling and Analysis of A 6 DOF Robotic Arm Manipulator: January 2012Georgiana BunghiuzNo ratings yet
- Robot Kinematics: Forward and Inverse Kinematics: December 2006Document33 pagesRobot Kinematics: Forward and Inverse Kinematics: December 2006Murat ToprakNo ratings yet
- Robot Mekanik HesaplamalarDocument33 pagesRobot Mekanik HesaplamalarMurat ToprakNo ratings yet
- Automatic Balancing Robot: Madhuram.M (Assistant Professor)Document12 pagesAutomatic Balancing Robot: Madhuram.M (Assistant Professor)رشيد بن صغيرNo ratings yet
- Learning To Walk in 20 Minutes: Russt@csail - Mit.edu Resa@berkeley - Edu Seung@mit - EduDocument6 pagesLearning To Walk in 20 Minutes: Russt@csail - Mit.edu Resa@berkeley - Edu Seung@mit - EduTaylan Utku MertNo ratings yet
- IJAORLU v7n1p77 enDocument9 pagesIJAORLU v7n1p77 eneugeneNo ratings yet
- Abhijit Makhal, 2017. (ArXiv) Reuleaux - Robot Base Placement by Reachability AnalysisDocument9 pagesAbhijit Makhal, 2017. (ArXiv) Reuleaux - Robot Base Placement by Reachability AnalysisNg Xian YaoNo ratings yet
- Xiao Gangruan2010Document9 pagesXiao Gangruan2010dan_intel6735No ratings yet
- Kinematic Model of Three Wheeled Mobile RobotDocument13 pagesKinematic Model of Three Wheeled Mobile RobotHiển TyNo ratings yet
- Impedance Estimation and Motion Control of A Pendulum-Driven Spherical RobotDocument6 pagesImpedance Estimation and Motion Control of A Pendulum-Driven Spherical RobotMuhammadNo ratings yet
- 112108298Document1,017 pages112108298Aryan RaiNo ratings yet
- Vine RobotsDocument20 pagesVine Robotsdivya AshishNo ratings yet
- Development and Control of ArticulatedDocument11 pagesDevelopment and Control of Articulatedkusalitha.hNo ratings yet
- Stair Climbing Robot Using Star-Wheel MethodologyDocument3 pagesStair Climbing Robot Using Star-Wheel MethodologyYeshwanth SuryaNo ratings yet
- Design of An Autonomous Humanoid Robot: ArticleDocument7 pagesDesign of An Autonomous Humanoid Robot: ArticleAnil Kumar AchariNo ratings yet
- Design For Assembly & Automation: Session: DFAA-12: Robotic ManipulatorDocument21 pagesDesign For Assembly & Automation: Session: DFAA-12: Robotic Manipulatorbrahma2deen2chaudharNo ratings yet
- CAM Notes Chapter 6Document2 pagesCAM Notes Chapter 6jay kalavadiyaNo ratings yet
- Robotic ArmDocument9 pagesRobotic ArmRohit KumarNo ratings yet
- University of Creative Technology, Chittagong: Future of Industrial Robots' in BangladeshDocument14 pagesUniversity of Creative Technology, Chittagong: Future of Industrial Robots' in BangladeshwagoheNo ratings yet
- Articulated Body Pose Estimation: Unlocking Human Motion in Computer VisionFrom EverandArticulated Body Pose Estimation: Unlocking Human Motion in Computer VisionNo ratings yet
- Advances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFrom EverandAdvances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFarrokh Janabi-SharifiNo ratings yet
- QB Final YearDocument201 pagesQB Final YearmaniNo ratings yet
- Robotics: (VII Semester, B.E. Mech)Document77 pagesRobotics: (VII Semester, B.E. Mech)maniNo ratings yet
- Oie751 Robotics: Faculty Name K.Manikandan Associate Professor /mech A.HOD. MamceDocument48 pagesOie751 Robotics: Faculty Name K.Manikandan Associate Professor /mech A.HOD. MamcemaniNo ratings yet
- Introduction To Robotics: A Common View: Robots As HumanoidsDocument24 pagesIntroduction To Robotics: A Common View: Robots As HumanoidsmaniNo ratings yet
- CH 8 Industrial RoboticsDocument21 pagesCH 8 Industrial RoboticsmaniNo ratings yet
- Me6503 Dome QB PDFDocument65 pagesMe6503 Dome QB PDFmaniNo ratings yet
- KCET 2020 Cut Off Engineering General Round 1Document34 pagesKCET 2020 Cut Off Engineering General Round 1Adithya SRKianNo ratings yet
- Q1 - Melc 4Document71 pagesQ1 - Melc 4Geraldine MatiasNo ratings yet
- Porter's 7 Forces Analysis - 5 Forces & Include Geographical and PoliticalDocument3 pagesPorter's 7 Forces Analysis - 5 Forces & Include Geographical and PoliticalPhuong NguyenNo ratings yet
- © 2017 Interview Camp (Interviewcamp - Io)Document6 pages© 2017 Interview Camp (Interviewcamp - Io)abhi74No ratings yet
- CDQ 11039Document2 pagesCDQ 11039swasifaliNo ratings yet
- 3 Practice File: Working With WordsDocument6 pages3 Practice File: Working With WordsDeepika RokayaNo ratings yet
- DB 01 SubstationDocument1 pageDB 01 Substationfahamida joyaNo ratings yet
- Initial PagesDocument7 pagesInitial PagesLaxmisha GowdaNo ratings yet
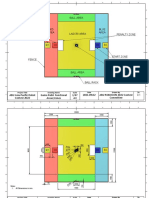
- Lagori FiguresDocument15 pagesLagori FiguresSAMPANo ratings yet
- 7-Day Digital Grounded Timer Updated Instructions - 2829Document2 pages7-Day Digital Grounded Timer Updated Instructions - 2829SakulaNo ratings yet
- Section 7 - Transmission PDFDocument30 pagesSection 7 - Transmission PDFrobbertmdNo ratings yet
- Completing The Square: DR J Frost (Jfrost@tiffin - Kingston.sch - Uk)Document21 pagesCompleting The Square: DR J Frost (Jfrost@tiffin - Kingston.sch - Uk)amandeep kaurNo ratings yet
- WorkbookDocument144 pagesWorkbookpillaynorman20No ratings yet
- Module 1 Rac Servicing 1Document7 pagesModule 1 Rac Servicing 1Ivan kayle BatistinNo ratings yet
- Ball Mill For Cement GrindingDocument5 pagesBall Mill For Cement GrindingJorge SilvaNo ratings yet
- E1Qalg BDocument2 pagesE1Qalg BSeo KolNo ratings yet
- APC Computer Magazine Issue 452 March 2018Document116 pagesAPC Computer Magazine Issue 452 March 2018bibicul1958No ratings yet
- Encyclopedia of Gender and Information Technology PDFDocument1,422 pagesEncyclopedia of Gender and Information Technology PDFGema Valencia100% (1)
- Antera CS BrochureDocument2 pagesAntera CS BrochurePhúc LâmNo ratings yet
- Gyro Skipper PlansDocument5 pagesGyro Skipper PlansJayantha KandegamaNo ratings yet
- Chapter TwoDocument9 pagesChapter TwoFuad AhmedNo ratings yet
- 2012 LabVIEW Core 1 Exercises Manual PDFDocument198 pages2012 LabVIEW Core 1 Exercises Manual PDFMarioC9150% (6)
- Statement 194801000020579Document11 pagesStatement 194801000020579ssm.thisaiyanvilaihdbfsNo ratings yet
- 2-Stacks and QueuesDocument3 pages2-Stacks and QueuesLuong Nguyen Viet Khoa (K16HL)No ratings yet
- Week 5 - TBM ExcavationDocument16 pagesWeek 5 - TBM ExcavationNilakshiManawaduNo ratings yet
- 500kVA DG Offer With SYNC PanelDocument4 pages500kVA DG Offer With SYNC PanelPeyush MehtoNo ratings yet