
Multiprogramming in 8086 Microprocessor
Multiprogramming in 8086 Microprocessor
You might also like
- Selfie Kyc Bypass TutorialDocument2 pagesSelfie Kyc Bypass Tutorialpanesah991100% (2)
- Din 76-2 PDFDocument3 pagesDin 76-2 PDFtobster9956% (9)
- DataEase Reference ManualDocument396 pagesDataEase Reference Manualsarametandrei100% (1)
- Microcontroller 8051Document76 pagesMicrocontroller 8051Anand GharuNo ratings yet
- SPIDR PosterDocument1 pageSPIDR Postersuper_sumoNo ratings yet
- ALTAIR - Multiscale Designer 2020 - User ManualDocument455 pagesALTAIR - Multiscale Designer 2020 - User ManualsantiagoNo ratings yet
- Remove Malware - Free: Quick Malware Removal in 2 Minutes. Free Download (Highly Recommended)Document9 pagesRemove Malware - Free: Quick Malware Removal in 2 Minutes. Free Download (Highly Recommended)Mainak SasmalNo ratings yet
- 8086 Microprocessor - InterruptsDocument35 pages8086 Microprocessor - InterruptsRocky SamratNo ratings yet
- Assignment Questions of ES1Document5 pagesAssignment Questions of ES1tanviNo ratings yet
- 8086 MicroprocessorDocument63 pages8086 MicroprocessorMadhuri Rudravelli100% (1)
- Exp No.:5 Date: Arithmetic OperationsDocument12 pagesExp No.:5 Date: Arithmetic OperationsAbhijit BhatNo ratings yet
- Assignment Questions-MicrocontrollerDocument1 pageAssignment Questions-MicrocontrollerharshithaNo ratings yet
- Microcontroller 8051Document72 pagesMicrocontroller 8051vaibhav sharmaNo ratings yet
- UNIT V Microcontroller I - MCQsDocument10 pagesUNIT V Microcontroller I - MCQsPadmaja Venkataraman100% (2)
- Microprocessor and MicrocontrollerDocument35 pagesMicroprocessor and MicrocontrollerPRABHVaB100% (1)
- An Overview of RF MEMS SwitchesDocument21 pagesAn Overview of RF MEMS SwitchesSarjak Shah67% (3)
- MPMC Lab Manual 2019-20 PDFDocument35 pagesMPMC Lab Manual 2019-20 PDFVinay KumarNo ratings yet
- ARM - PPT 8Document74 pagesARM - PPT 8roysalways4u100% (1)
- Running Machines: Arm Multiple ChoiceDocument4 pagesRunning Machines: Arm Multiple ChoicePoojaNo ratings yet
- Advanced Microprocessor & Microcontroller Lab Manual PDFDocument22 pagesAdvanced Microprocessor & Microcontroller Lab Manual PDFtariq76No ratings yet
- ARM Organization and Implementation: Aleksandar MilenkovicDocument37 pagesARM Organization and Implementation: Aleksandar Milenkovicarthicse100% (1)
- IES Objective Question BankDocument10 pagesIES Objective Question BankNischal ParsiNo ratings yet
- Introduction To DSP Processors: K. Vijaya Kumar Asst. Prof. Usharama College of Engineering & TechnologyDocument45 pagesIntroduction To DSP Processors: K. Vijaya Kumar Asst. Prof. Usharama College of Engineering & TechnologyLavanya KattaNo ratings yet
- 8051 - MCQDocument5 pages8051 - MCQveeramaniks408No ratings yet
- Instruction Format 8051Document26 pagesInstruction Format 8051alex24arulNo ratings yet
- Micro MCQSDocument16 pagesMicro MCQSSyed HamedoonNo ratings yet
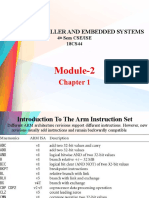
- Module-2: Microcontroller and Embedded SystemsDocument74 pagesModule-2: Microcontroller and Embedded Systemsswethaashok28No ratings yet
- MP & MC Model Lab QuestionDocument1 pageMP & MC Model Lab QuestionsivabalakrishnanNo ratings yet
- 4 Instruction PipelineDocument13 pages4 Instruction PipelineAKASH PALNo ratings yet
- Semiconductor Memories: VLSI Design (18EC72)Document11 pagesSemiconductor Memories: VLSI Design (18EC72)PraveenNo ratings yet
- UNIT-5: Task CommunicationDocument30 pagesUNIT-5: Task CommunicationFarheenNo ratings yet
- Microprocessors and Microcontrollers/Interfacing With 8086Document3 pagesMicroprocessors and Microcontrollers/Interfacing With 8086vipuljain1989100% (4)
- Pipeline Hazards. PresentationDocument20 pagesPipeline Hazards. PresentationReaderRRGHT100% (1)
- Multiplier in Vlsi PDFDocument23 pagesMultiplier in Vlsi PDFvmspraneeth100% (1)
- 8086 and Memory Interfacing - FinalDocument28 pages8086 and Memory Interfacing - FinalAnushkaSinha100% (2)
- 8051 Manual FinDocument39 pages8051 Manual Finnagaraj100% (2)
- Embedded System Architecture SlidesDocument40 pagesEmbedded System Architecture SlidesKiran Tk100% (1)
- DCN-unit-1 ModifiedDocument112 pagesDCN-unit-1 ModifiedMayank KumarNo ratings yet
- Instruction PipelineDocument27 pagesInstruction PipelineEswin AngelNo ratings yet
- 15ec563 - 8051 Microcontroller - Syllabus PDFDocument2 pages15ec563 - 8051 Microcontroller - Syllabus PDFNagesh100% (1)
- Podem AlgorithmDocument4 pagesPodem AlgorithmPraveen Kumar ReddyNo ratings yet
- Chapter 7 Interrupts of 8085Document20 pagesChapter 7 Interrupts of 8085shubhankar pal100% (1)
- Stack StructureDocument19 pagesStack StructureVivek AdabalaNo ratings yet
- Model QP - MPMC Lab - Wo Split UpDocument3 pagesModel QP - MPMC Lab - Wo Split Upsujaganesan20090% (1)
- Ec8552 CaoDocument9 pagesEc8552 CaoDr. R. Selvakumar Associate ProfessorNo ratings yet
- Vlsi Lab Manual 17ecl77 2020 SaitDocument157 pagesVlsi Lab Manual 17ecl77 2020 Saitsuraj jha100% (1)
- Apb Protocal: Presented By, Sulthana ShaikDocument26 pagesApb Protocal: Presented By, Sulthana ShaikJerin VargheseNo ratings yet
- Scilab Manual For Digital Signal Processing by MR Vijay P Sompur Electronics Engineering Visvesvraya Technological UniversityDocument51 pagesScilab Manual For Digital Signal Processing by MR Vijay P Sompur Electronics Engineering Visvesvraya Technological Universitysuvarnalatha devarakonda100% (1)
- II - Software Design For Low PowerDocument11 pagesII - Software Design For Low Powermonishabe23No ratings yet
- Experiment 1 Familiarization With The Edsim51 Simulator and The 8051 Instruction SetDocument6 pagesExperiment 1 Familiarization With The Edsim51 Simulator and The 8051 Instruction SetDefinitelyNotCyNo ratings yet
- Verilog Objective TestDocument5 pagesVerilog Objective TestRajib SamadderNo ratings yet
- MCQ Bank For ARM in FormatDocument8 pagesMCQ Bank For ARM in FormatSubrat Kumar Pradhan75% (4)
- MP Viva Questions With AnswersDocument13 pagesMP Viva Questions With AnswersDeepti ChandrasekharanNo ratings yet
- 28-5-I O Fundamentals Handshaking, Buffering-20!10!2021 (20-Oct-2021) Material I 20-10-2021 Unit-5-Lecture1Document15 pages28-5-I O Fundamentals Handshaking, Buffering-20!10!2021 (20-Oct-2021) Material I 20-10-2021 Unit-5-Lecture1Mudit Jain100% (1)
- Module-5 Part-2: Exception and Interrupt HandlingDocument23 pagesModule-5 Part-2: Exception and Interrupt Handling1232023No ratings yet
- 8051 Lab Experiments With SolutionDocument11 pages8051 Lab Experiments With SolutionInaamahmed13No ratings yet
- EE8691 Embedded Systems NotesDocument76 pagesEE8691 Embedded Systems NotesMalik MubeenNo ratings yet
- 8051 Unit 1 NotesDocument19 pages8051 Unit 1 NotesSOMESH B S100% (13)
- Os Unit 2Document60 pagesOs Unit 2Anish Dubey SultanpurNo ratings yet
- Lecture 5 - Inter Process CommunicationDocument17 pagesLecture 5 - Inter Process CommunicationtalentNo ratings yet
- Process: Unit 2 Operating SystemDocument28 pagesProcess: Unit 2 Operating SystemHemant SharmaNo ratings yet
- Lecture 4 - Process - CPU SchedulingDocument38 pagesLecture 4 - Process - CPU SchedulingtalentNo ratings yet
- Unit 2-1Document116 pagesUnit 2-1harikrishnahari6276No ratings yet
- Threads & SemaphoreDocument24 pagesThreads & SemaphorePraveen Kumar SharmaNo ratings yet
- Process Management: By: Modaser SadatDocument10 pagesProcess Management: By: Modaser SadatModaser SadatNo ratings yet
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsFrom EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsNo ratings yet
- Insite Gold Complete User Guide: PrefaceDocument51 pagesInsite Gold Complete User Guide: PrefacelaurNo ratings yet
- Full Ebook of Interactive Computer Graphics A Top Down Approach With Webgl 8Th Edition Edward Angel Online PDF All ChapterDocument69 pagesFull Ebook of Interactive Computer Graphics A Top Down Approach With Webgl 8Th Edition Edward Angel Online PDF All Chapterjeromesimpson635128100% (5)
- Project CharterDocument8 pagesProject CharterAyande A.B Prosper100% (1)
- CURRICULUM MAP TemplateDocument2 pagesCURRICULUM MAP TemplateAiree JordanNo ratings yet
- 01.JavaScript Reintroduction 1Document60 pages01.JavaScript Reintroduction 1Teodora DimovskaNo ratings yet
- LocateDocument15 pagesLocateSergio RiveraNo ratings yet
- Code PtitDocument27 pagesCode Ptitđinh trungNo ratings yet
- Migracion de Storage SQL ServerDocument5 pagesMigracion de Storage SQL Serverelcaso34No ratings yet
- TVL Comprog12-Q3-M8Document10 pagesTVL Comprog12-Q3-M8justin tolangNo ratings yet
- ISTQB CT SEC - Syllabus - v1.0 - 2016 11 83Document73 pagesISTQB CT SEC - Syllabus - v1.0 - 2016 11 83phucNo ratings yet
- Business View Design GuideDocument30 pagesBusiness View Design GuideAhmed ChakrounNo ratings yet
- Mumbai University B.E. EXTC - Sem 5 DBMS ExperimentDocument3 pagesMumbai University B.E. EXTC - Sem 5 DBMS ExperimentDrunk Driver DetectionNo ratings yet
- Vertical Situation Display (VSD) : Introduction To The B737-NGDocument17 pagesVertical Situation Display (VSD) : Introduction To The B737-NGwilliamNo ratings yet
- VxRail Appliance - VxRail How To Change Vmotion NetworkDocument7 pagesVxRail Appliance - VxRail How To Change Vmotion Networkarthur jhonatan barzola mayorgaNo ratings yet
- Test Automation ThesisDocument5 pagesTest Automation Thesisdeepjonesmanchester100% (1)
- DSI - TP 1515-1516 Microcontroller Development Systems - en (Screen)Document4 pagesDSI - TP 1515-1516 Microcontroller Development Systems - en (Screen)Zain NertaNo ratings yet
- CATALOGODocument24 pagesCATALOGOIng. Julio MayaNo ratings yet
- Yakshini-Tantra in Telugu PDF - PDFDocument142 pagesYakshini-Tantra in Telugu PDF - PDFajesh kancharlaNo ratings yet
- RH342 Study Sheet: System BootDocument5 pagesRH342 Study Sheet: System BootdchikumbaNo ratings yet
- Digital Design and Computer Architecture, 2: EditionDocument10 pagesDigital Design and Computer Architecture, 2: Editionmoacyranicio6360No ratings yet
- M O C 2789A Administering and Automating Microsoft SQL Server 2005 Databases Server Beta TrainerDocument127 pagesM O C 2789A Administering and Automating Microsoft SQL Server 2005 Databases Server Beta TrainerHugo FilipeNo ratings yet
- Time and Labor Methods For ReuseDocument5 pagesTime and Labor Methods For ReuseJiju Cherian VengalNo ratings yet
- 493-9012-11 - en Distributed Control and Visualisation (DCS)Document4 pages493-9012-11 - en Distributed Control and Visualisation (DCS)ImmamHadramyNo ratings yet
- MIGS Virtual Payment Client Guide Rev 2.1.0 PDFDocument105 pagesMIGS Virtual Payment Client Guide Rev 2.1.0 PDFAhmed Reda MohamedNo ratings yet
























































































Download as pptx, pdf, or txt
You might also like
- Selfie Kyc Bypass TutorialDocument2 pagesSelfie Kyc Bypass Tutorialpanesah991100% (2)
- Din 76-2 PDFDocument3 pagesDin 76-2 PDFtobster9956% (9)
- DataEase Reference ManualDocument396 pagesDataEase Reference Manualsarametandrei100% (1)
- Microcontroller 8051Document76 pagesMicrocontroller 8051Anand GharuNo ratings yet
- SPIDR PosterDocument1 pageSPIDR Postersuper_sumoNo ratings yet
- ALTAIR - Multiscale Designer 2020 - User ManualDocument455 pagesALTAIR - Multiscale Designer 2020 - User ManualsantiagoNo ratings yet
- Remove Malware - Free: Quick Malware Removal in 2 Minutes. Free Download (Highly Recommended)Document9 pagesRemove Malware - Free: Quick Malware Removal in 2 Minutes. Free Download (Highly Recommended)Mainak SasmalNo ratings yet
- 8086 Microprocessor - InterruptsDocument35 pages8086 Microprocessor - InterruptsRocky SamratNo ratings yet
- Assignment Questions of ES1Document5 pagesAssignment Questions of ES1tanviNo ratings yet
- 8086 MicroprocessorDocument63 pages8086 MicroprocessorMadhuri Rudravelli100% (1)
- Exp No.:5 Date: Arithmetic OperationsDocument12 pagesExp No.:5 Date: Arithmetic OperationsAbhijit BhatNo ratings yet
- Assignment Questions-MicrocontrollerDocument1 pageAssignment Questions-MicrocontrollerharshithaNo ratings yet
- Microcontroller 8051Document72 pagesMicrocontroller 8051vaibhav sharmaNo ratings yet
- UNIT V Microcontroller I - MCQsDocument10 pagesUNIT V Microcontroller I - MCQsPadmaja Venkataraman100% (2)
- Microprocessor and MicrocontrollerDocument35 pagesMicroprocessor and MicrocontrollerPRABHVaB100% (1)
- An Overview of RF MEMS SwitchesDocument21 pagesAn Overview of RF MEMS SwitchesSarjak Shah67% (3)
- MPMC Lab Manual 2019-20 PDFDocument35 pagesMPMC Lab Manual 2019-20 PDFVinay KumarNo ratings yet
- ARM - PPT 8Document74 pagesARM - PPT 8roysalways4u100% (1)
- Running Machines: Arm Multiple ChoiceDocument4 pagesRunning Machines: Arm Multiple ChoicePoojaNo ratings yet
- Advanced Microprocessor & Microcontroller Lab Manual PDFDocument22 pagesAdvanced Microprocessor & Microcontroller Lab Manual PDFtariq76No ratings yet
- ARM Organization and Implementation: Aleksandar MilenkovicDocument37 pagesARM Organization and Implementation: Aleksandar Milenkovicarthicse100% (1)
- IES Objective Question BankDocument10 pagesIES Objective Question BankNischal ParsiNo ratings yet
- Introduction To DSP Processors: K. Vijaya Kumar Asst. Prof. Usharama College of Engineering & TechnologyDocument45 pagesIntroduction To DSP Processors: K. Vijaya Kumar Asst. Prof. Usharama College of Engineering & TechnologyLavanya KattaNo ratings yet
- 8051 - MCQDocument5 pages8051 - MCQveeramaniks408No ratings yet
- Instruction Format 8051Document26 pagesInstruction Format 8051alex24arulNo ratings yet
- Micro MCQSDocument16 pagesMicro MCQSSyed HamedoonNo ratings yet
- Module-2: Microcontroller and Embedded SystemsDocument74 pagesModule-2: Microcontroller and Embedded Systemsswethaashok28No ratings yet
- MP & MC Model Lab QuestionDocument1 pageMP & MC Model Lab QuestionsivabalakrishnanNo ratings yet
- 4 Instruction PipelineDocument13 pages4 Instruction PipelineAKASH PALNo ratings yet
- Semiconductor Memories: VLSI Design (18EC72)Document11 pagesSemiconductor Memories: VLSI Design (18EC72)PraveenNo ratings yet
- UNIT-5: Task CommunicationDocument30 pagesUNIT-5: Task CommunicationFarheenNo ratings yet
- Microprocessors and Microcontrollers/Interfacing With 8086Document3 pagesMicroprocessors and Microcontrollers/Interfacing With 8086vipuljain1989100% (4)
- Pipeline Hazards. PresentationDocument20 pagesPipeline Hazards. PresentationReaderRRGHT100% (1)
- Multiplier in Vlsi PDFDocument23 pagesMultiplier in Vlsi PDFvmspraneeth100% (1)
- 8086 and Memory Interfacing - FinalDocument28 pages8086 and Memory Interfacing - FinalAnushkaSinha100% (2)
- 8051 Manual FinDocument39 pages8051 Manual Finnagaraj100% (2)
- Embedded System Architecture SlidesDocument40 pagesEmbedded System Architecture SlidesKiran Tk100% (1)
- DCN-unit-1 ModifiedDocument112 pagesDCN-unit-1 ModifiedMayank KumarNo ratings yet
- Instruction PipelineDocument27 pagesInstruction PipelineEswin AngelNo ratings yet
- 15ec563 - 8051 Microcontroller - Syllabus PDFDocument2 pages15ec563 - 8051 Microcontroller - Syllabus PDFNagesh100% (1)
- Podem AlgorithmDocument4 pagesPodem AlgorithmPraveen Kumar ReddyNo ratings yet
- Chapter 7 Interrupts of 8085Document20 pagesChapter 7 Interrupts of 8085shubhankar pal100% (1)
- Stack StructureDocument19 pagesStack StructureVivek AdabalaNo ratings yet
- Model QP - MPMC Lab - Wo Split UpDocument3 pagesModel QP - MPMC Lab - Wo Split Upsujaganesan20090% (1)
- Ec8552 CaoDocument9 pagesEc8552 CaoDr. R. Selvakumar Associate ProfessorNo ratings yet
- Vlsi Lab Manual 17ecl77 2020 SaitDocument157 pagesVlsi Lab Manual 17ecl77 2020 Saitsuraj jha100% (1)
- Apb Protocal: Presented By, Sulthana ShaikDocument26 pagesApb Protocal: Presented By, Sulthana ShaikJerin VargheseNo ratings yet
- Scilab Manual For Digital Signal Processing by MR Vijay P Sompur Electronics Engineering Visvesvraya Technological UniversityDocument51 pagesScilab Manual For Digital Signal Processing by MR Vijay P Sompur Electronics Engineering Visvesvraya Technological Universitysuvarnalatha devarakonda100% (1)
- II - Software Design For Low PowerDocument11 pagesII - Software Design For Low Powermonishabe23No ratings yet
- Experiment 1 Familiarization With The Edsim51 Simulator and The 8051 Instruction SetDocument6 pagesExperiment 1 Familiarization With The Edsim51 Simulator and The 8051 Instruction SetDefinitelyNotCyNo ratings yet
- Verilog Objective TestDocument5 pagesVerilog Objective TestRajib SamadderNo ratings yet
- MCQ Bank For ARM in FormatDocument8 pagesMCQ Bank For ARM in FormatSubrat Kumar Pradhan75% (4)
- MP Viva Questions With AnswersDocument13 pagesMP Viva Questions With AnswersDeepti ChandrasekharanNo ratings yet
- 28-5-I O Fundamentals Handshaking, Buffering-20!10!2021 (20-Oct-2021) Material I 20-10-2021 Unit-5-Lecture1Document15 pages28-5-I O Fundamentals Handshaking, Buffering-20!10!2021 (20-Oct-2021) Material I 20-10-2021 Unit-5-Lecture1Mudit Jain100% (1)
- Module-5 Part-2: Exception and Interrupt HandlingDocument23 pagesModule-5 Part-2: Exception and Interrupt Handling1232023No ratings yet
- 8051 Lab Experiments With SolutionDocument11 pages8051 Lab Experiments With SolutionInaamahmed13No ratings yet
- EE8691 Embedded Systems NotesDocument76 pagesEE8691 Embedded Systems NotesMalik MubeenNo ratings yet
- 8051 Unit 1 NotesDocument19 pages8051 Unit 1 NotesSOMESH B S100% (13)
- Os Unit 2Document60 pagesOs Unit 2Anish Dubey SultanpurNo ratings yet
- Lecture 5 - Inter Process CommunicationDocument17 pagesLecture 5 - Inter Process CommunicationtalentNo ratings yet
- Process: Unit 2 Operating SystemDocument28 pagesProcess: Unit 2 Operating SystemHemant SharmaNo ratings yet
- Lecture 4 - Process - CPU SchedulingDocument38 pagesLecture 4 - Process - CPU SchedulingtalentNo ratings yet
- Unit 2-1Document116 pagesUnit 2-1harikrishnahari6276No ratings yet
- Threads & SemaphoreDocument24 pagesThreads & SemaphorePraveen Kumar SharmaNo ratings yet
- Process Management: By: Modaser SadatDocument10 pagesProcess Management: By: Modaser SadatModaser SadatNo ratings yet
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsFrom EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsNo ratings yet
- Insite Gold Complete User Guide: PrefaceDocument51 pagesInsite Gold Complete User Guide: PrefacelaurNo ratings yet
- Full Ebook of Interactive Computer Graphics A Top Down Approach With Webgl 8Th Edition Edward Angel Online PDF All ChapterDocument69 pagesFull Ebook of Interactive Computer Graphics A Top Down Approach With Webgl 8Th Edition Edward Angel Online PDF All Chapterjeromesimpson635128100% (5)
- Project CharterDocument8 pagesProject CharterAyande A.B Prosper100% (1)
- CURRICULUM MAP TemplateDocument2 pagesCURRICULUM MAP TemplateAiree JordanNo ratings yet
- 01.JavaScript Reintroduction 1Document60 pages01.JavaScript Reintroduction 1Teodora DimovskaNo ratings yet
- LocateDocument15 pagesLocateSergio RiveraNo ratings yet
- Code PtitDocument27 pagesCode Ptitđinh trungNo ratings yet
- Migracion de Storage SQL ServerDocument5 pagesMigracion de Storage SQL Serverelcaso34No ratings yet
- TVL Comprog12-Q3-M8Document10 pagesTVL Comprog12-Q3-M8justin tolangNo ratings yet
- ISTQB CT SEC - Syllabus - v1.0 - 2016 11 83Document73 pagesISTQB CT SEC - Syllabus - v1.0 - 2016 11 83phucNo ratings yet
- Business View Design GuideDocument30 pagesBusiness View Design GuideAhmed ChakrounNo ratings yet
- Mumbai University B.E. EXTC - Sem 5 DBMS ExperimentDocument3 pagesMumbai University B.E. EXTC - Sem 5 DBMS ExperimentDrunk Driver DetectionNo ratings yet
- Vertical Situation Display (VSD) : Introduction To The B737-NGDocument17 pagesVertical Situation Display (VSD) : Introduction To The B737-NGwilliamNo ratings yet
- VxRail Appliance - VxRail How To Change Vmotion NetworkDocument7 pagesVxRail Appliance - VxRail How To Change Vmotion Networkarthur jhonatan barzola mayorgaNo ratings yet
- Test Automation ThesisDocument5 pagesTest Automation Thesisdeepjonesmanchester100% (1)
- DSI - TP 1515-1516 Microcontroller Development Systems - en (Screen)Document4 pagesDSI - TP 1515-1516 Microcontroller Development Systems - en (Screen)Zain NertaNo ratings yet
- CATALOGODocument24 pagesCATALOGOIng. Julio MayaNo ratings yet
- Yakshini-Tantra in Telugu PDF - PDFDocument142 pagesYakshini-Tantra in Telugu PDF - PDFajesh kancharlaNo ratings yet
- RH342 Study Sheet: System BootDocument5 pagesRH342 Study Sheet: System BootdchikumbaNo ratings yet
- Digital Design and Computer Architecture, 2: EditionDocument10 pagesDigital Design and Computer Architecture, 2: Editionmoacyranicio6360No ratings yet
- M O C 2789A Administering and Automating Microsoft SQL Server 2005 Databases Server Beta TrainerDocument127 pagesM O C 2789A Administering and Automating Microsoft SQL Server 2005 Databases Server Beta TrainerHugo FilipeNo ratings yet
- Time and Labor Methods For ReuseDocument5 pagesTime and Labor Methods For ReuseJiju Cherian VengalNo ratings yet
- 493-9012-11 - en Distributed Control and Visualisation (DCS)Document4 pages493-9012-11 - en Distributed Control and Visualisation (DCS)ImmamHadramyNo ratings yet
- MIGS Virtual Payment Client Guide Rev 2.1.0 PDFDocument105 pagesMIGS Virtual Payment Client Guide Rev 2.1.0 PDFAhmed Reda MohamedNo ratings yet