Download as pptx, pdf, or txt
You might also like
- Iec 62052-11-2020Document124 pagesIec 62052-11-2020thuahan rathnayakeNo ratings yet
- Four Quadrant Operation of DC Drives: - Dual ConvertersDocument12 pagesFour Quadrant Operation of DC Drives: - Dual ConvertersDr.K.Krishna VeniNo ratings yet
- Amplifier Anatomy - Part 1: By: Patrick Quilter, Chief Technical Officer QSC Audio Products, IncDocument13 pagesAmplifier Anatomy - Part 1: By: Patrick Quilter, Chief Technical Officer QSC Audio Products, Inckashif1234567890No ratings yet
- Important Mcq-Communication SystemsDocument9 pagesImportant Mcq-Communication Systemsarijitlgsp100% (1)
- Chopper Fed Drives Updated18-10-2021Document44 pagesChopper Fed Drives Updated18-10-2021Dr.K.Krishna VeniNo ratings yet
- Four Quadrant Chopper or Class-E Chopper - Electrical ConceptsDocument3 pagesFour Quadrant Chopper or Class-E Chopper - Electrical ConceptsGOVERNMENT APPRENTICESHIPNo ratings yet
- Chopper DC To DC ConverterDocument37 pagesChopper DC To DC ConverterGautam Kumar100% (1)
- Unit-4 Elecrical Drives and Controls II PartDocument29 pagesUnit-4 Elecrical Drives and Controls II PartsentamilselvanNo ratings yet
- Types of Chopper CircuitsDocument13 pagesTypes of Chopper Circuitsqais12100% (1)
- Types of Chopper CircuitDocument21 pagesTypes of Chopper CircuitVinay JainNo ratings yet
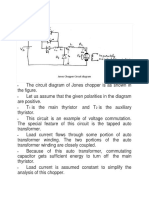
- Jones Chopper Circuit DiagramDocument12 pagesJones Chopper Circuit DiagramAniket LikharNo ratings yet
- Types of Chopper CircuitsDocument3 pagesTypes of Chopper CircuitsAkash BiswasNo ratings yet
- Rohini 98792646489Document7 pagesRohini 98792646489ChippyVijayanNo ratings yet
- CYCLOCONVERTERDocument17 pagesCYCLOCONVERTERRachmat Guntur Dwi Putra100% (1)
- Answers of Power Electronics NewDocument9 pagesAnswers of Power Electronics NewSyed ZabiullahNo ratings yet
- CyclocovertersDocument4 pagesCyclocovertersAlfredNo ratings yet
- DC Motor Speed Control by Four Quadrant ChopperDocument12 pagesDC Motor Speed Control by Four Quadrant ChopperSokNov NaiNo ratings yet
- Cycloconverters: Fig.1 Block Diagram of A CycloconverterDocument17 pagesCycloconverters: Fig.1 Block Diagram of A Cycloconvertersagar jaiswal100% (3)
- Step-Down Cycloconverter Explained - Electrical ConceptsDocument5 pagesStep-Down Cycloconverter Explained - Electrical ConceptsMohammad HamamdNo ratings yet
- In Industrial ApplicationsDocument10 pagesIn Industrial ApplicationsEddy Santiago Neira SisaNo ratings yet
- Chapter 13Document24 pagesChapter 13Noer DianNo ratings yet
- Unit 2 - ED - 2ND PARTDocument21 pagesUnit 2 - ED - 2ND PARTMohit L.E. 008No ratings yet
- Phase-Controlled Converters: Unit IiDocument29 pagesPhase-Controlled Converters: Unit IiChinnaGurappaNo ratings yet
- MentionDocument13 pagesMentionmssmsNo ratings yet
- Choppers and Cyclo ConvertersDocument12 pagesChoppers and Cyclo ConvertersPaul MatshonaNo ratings yet
- Cycloconverter: 3.1 Principle of Operation of CycloconverterDocument19 pagesCycloconverter: 3.1 Principle of Operation of CycloconverterS JainNo ratings yet
- Current Commutated Chopper Through SimulinkDocument54 pagesCurrent Commutated Chopper Through SimulinkAbhijeetSinha100% (1)
- Effect of Source InductanceDocument10 pagesEffect of Source Inductancemeeravali_snNo ratings yet
- Advanced Power Electronics and Control: Non Isolated & Isolated DC-DC Converters and ChoppersDocument19 pagesAdvanced Power Electronics and Control: Non Isolated & Isolated DC-DC Converters and ChoppersSAMI NATHANNo ratings yet
- Buck Boost ConverterDocument5 pagesBuck Boost ConverterG VigneshNo ratings yet
- Unit - V InvertersDocument11 pagesUnit - V InvertersSukhpal SinghNo ratings yet
- Swarna Fina TecghDocument38 pagesSwarna Fina TecghKundanam VenkateshNo ratings yet
- Fpe QB 23Document7 pagesFpe QB 23manishchalke65No ratings yet
- EM-3 Unit-4 UpdatedDocument22 pagesEM-3 Unit-4 UpdatedPrathap VuyyuruNo ratings yet
- ASSIGNMENT 3 - HemakeshDocument13 pagesASSIGNMENT 3 - HemakeshHemkeshNo ratings yet
- Chopper CircuitDocument3 pagesChopper CircuitMohammad H Al-QaisiNo ratings yet
- Single Phase Fully Controlled ConverterDocument10 pagesSingle Phase Fully Controlled ConverterDeepu Chinna75% (4)
- ShyamDocument7 pagesShyamBhukya Reethvik RathodNo ratings yet
- Buck Boost ChopperDocument10 pagesBuck Boost ChopperBeast WarlordNo ratings yet
- Electric DrivesDocument16 pagesElectric DrivesElie KabangaNo ratings yet
- Three Phase DC To Ac InverterDocument44 pagesThree Phase DC To Ac Inverternoor deen100% (1)
- AC-DC Converter - Multi PhaseDocument39 pagesAC-DC Converter - Multi Phasebishnu prasad muniNo ratings yet
- AC-DC Converter - DDocument39 pagesAC-DC Converter - DBishnu100% (1)
- Generator and Transmission Line StabilityDocument27 pagesGenerator and Transmission Line StabilityDan GrayNo ratings yet
- ChoppersDocument40 pagesChoppersSiddhaartha. RNo ratings yet
- Buck-Boost Converter: Principle of OperationDocument9 pagesBuck-Boost Converter: Principle of OperationRohanMishraNo ratings yet
- Single Phase Half Controlled Bridge Converter: DR - Arkan A.Hussein Power Electronics Fourth ClassDocument15 pagesSingle Phase Half Controlled Bridge Converter: DR - Arkan A.Hussein Power Electronics Fourth Classmohammed aliNo ratings yet
- New Type Single-Stage DC Ac InverterDocument5 pagesNew Type Single-Stage DC Ac InverterqiwatingNo ratings yet
- Chopper - DC To DC ConverterDocument8 pagesChopper - DC To DC ConverterAdrian VardNo ratings yet
- L11 Single Phase Half Controlled Bridge ConverterDocument19 pagesL11 Single Phase Half Controlled Bridge Converterapi-19951707No ratings yet
- AKT - Cycloconverter CDocument19 pagesAKT - Cycloconverter CDrAshok Kumar TiwariNo ratings yet
- Line Inductance EffectDocument21 pagesLine Inductance EffectAkhilesh JindalNo ratings yet
- BRIDGE FWR Class NotesDocument2 pagesBRIDGE FWR Class NotesRAJASHEKHARNo ratings yet
- Chapter Eight: Dc-Ac Conversion: InvertersDocument57 pagesChapter Eight: Dc-Ac Conversion: InvertersMd NazimNo ratings yet
- Ee20m084 Report FileDocument12 pagesEe20m084 Report Filepallavharshvardhan27No ratings yet
- Electrical and Electronic Principles 3 Checkbook: The Checkbook SeriesFrom EverandElectrical and Electronic Principles 3 Checkbook: The Checkbook SeriesNo ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Handbook of Power Systems Engineering with Power Electronics ApplicationsFrom EverandHandbook of Power Systems Engineering with Power Electronics ApplicationsNo ratings yet
- A New System of Alternating Current Motors and Transformers and Other EssaysFrom EverandA New System of Alternating Current Motors and Transformers and Other EssaysRating: 5 out of 5 stars5/5 (1)
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- SMPSDocument59 pagesSMPSDr.K.Krishna VeniNo ratings yet
- Electrical DrivesDocument19 pagesElectrical DrivesDr.K.Krishna VeniNo ratings yet
- 3 Types of BrakingDocument19 pages3 Types of BrakingDr.K.Krishna VeniNo ratings yet
- 1.course File - POWER SEMICONDUCTOR DRIVESDocument14 pages1.course File - POWER SEMICONDUCTOR DRIVESDr.K.Krishna VeniNo ratings yet
- Chopper Fed Drives Updated18-10-2021Document44 pagesChopper Fed Drives Updated18-10-2021Dr.K.Krishna VeniNo ratings yet
- Closed Loop Control NewDocument47 pagesClosed Loop Control NewDr.K.Krishna VeniNo ratings yet
- BEE Unit-IDocument25 pagesBEE Unit-IDr.K.Krishna VeniNo ratings yet
- QCX 5W CW Transceiver Kit Assembly InstructionsDocument152 pagesQCX 5W CW Transceiver Kit Assembly Instructionsfox7878No ratings yet
- Mallory 150 Gilmore Jr. Manual Rev 4 Dual Primary MM PTDocument29 pagesMallory 150 Gilmore Jr. Manual Rev 4 Dual Primary MM PTlksdjfNo ratings yet
- XP95A - Switch Monitor ModulesDocument2 pagesXP95A - Switch Monitor ModulesguilhermegomNo ratings yet
- Analytical Design Procedure For ResonantInductively Coupled Wireless Power Transfer SystemWith Class-DE Inverter and Class-E RectifierDocument4 pagesAnalytical Design Procedure For ResonantInductively Coupled Wireless Power Transfer SystemWith Class-DE Inverter and Class-E Rectifierjuan8aNo ratings yet
- Radio Engineering - Frederick Terman (1937)Document827 pagesRadio Engineering - Frederick Terman (1937)Carlistoss CharlangasNo ratings yet
- BSC Electronics SyllabusDocument35 pagesBSC Electronics SyllabusSunil GuptaNo ratings yet
- FDP On Electronic Circuits IDocument5 pagesFDP On Electronic Circuits Iapi-19951707No ratings yet
- 2.4 GHZ Class-E Power Amplifier With Transmission LINE Harmonic TerminationDocument7 pages2.4 GHZ Class-E Power Amplifier With Transmission LINE Harmonic TerminationYanelis GilNo ratings yet
- Electronic Principles 9Th Edition Albert P Malvino Full ChapterDocument51 pagesElectronic Principles 9Th Edition Albert P Malvino Full Chaptermary.roy331100% (7)
- 20 Watt Class-A Power AmplifierDocument4 pages20 Watt Class-A Power AmplifierArmin CuturicNo ratings yet
- Eca - QBDocument13 pagesEca - QBAnil kumarNo ratings yet
- Chopper: Class-C or Type-CDocument42 pagesChopper: Class-C or Type-CDr.K.Krishna VeniNo ratings yet
- Lab Power AmplifierDocument4 pagesLab Power Amplifiernor asyiqinNo ratings yet
- Ec6202-Electronic Devices and Circuits 2 Marks and 16 Marks (Q&A) Unit 1Document31 pagesEc6202-Electronic Devices and Circuits 2 Marks and 16 Marks (Q&A) Unit 1SayiTisanShalomNo ratings yet
- Designing An Audio AmplifierDocument35 pagesDesigning An Audio AmplifierCh Cheah100% (2)
- MCQ of Electronics Devices by Thomas FloydDocument14 pagesMCQ of Electronics Devices by Thomas FloydranaateeqNo ratings yet
- S.Y. B. Sc. (Electronic Science) - 17.062020Document14 pagesS.Y. B. Sc. (Electronic Science) - 17.062020RoshanNo ratings yet
- Broadband RF and Microwave AmplifiersDocument763 pagesBroadband RF and Microwave AmplifiersSatyam SharmaNo ratings yet
- 2-MHz Automotive Class-D, 4-Channel, 20-W Audio Amplifier in Class AB Ref DesignDocument32 pages2-MHz Automotive Class-D, 4-Channel, 20-W Audio Amplifier in Class AB Ref Designsebastian jaramilloNo ratings yet
- Topik 3 - Bipolar Junction Transistor (BJT)Document66 pagesTopik 3 - Bipolar Junction Transistor (BJT)faizahNo ratings yet
- DC Motor Speed Control by Four Quadrant ChopperDocument12 pagesDC Motor Speed Control by Four Quadrant ChopperSokNov NaiNo ratings yet
- Studio 50 CeDocument40 pagesStudio 50 CeEduardo Jose Fernandez PedrozaNo ratings yet
- High-E Ciency Class E/F Power Ampli Fiers With Extended Maximum Operating FrequencyDocument10 pagesHigh-E Ciency Class E/F Power Ampli Fiers With Extended Maximum Operating FrequencyBangsa PEJUANGNo ratings yet
- Electronic Devices and Circuit TheoryDocument31 pagesElectronic Devices and Circuit TheoryIñaki Zuriel ConstantinoNo ratings yet
- The GEM: A Class-A//AB AmplifierDocument16 pagesThe GEM: A Class-A//AB AmplifierFilimone ThumboNo ratings yet
- Electronic Circuits: Engr. Denver G. MagtibayDocument106 pagesElectronic Circuits: Engr. Denver G. MagtibayRealyn Macatangay100% (2)
- Ckp-Series DatasheetDocument10 pagesCkp-Series DatasheetSamylover Jean BaptisteNo ratings yet