Download as ppt, pdf, or txt
You might also like
- Circuit Breakers McqsDocument56 pagesCircuit Breakers McqsEngrAneelKumarAkhani79% (14)
- Class - 15 - DC MotorsDocument24 pagesClass - 15 - DC MotorsHafsa Alhaddabi0% (1)
- Samsung Ue40f8000sl Ue46f8000sl Ue55f8000sl Ue65f8000sl Ue75f8000sl Chassis U90a PDFDocument77 pagesSamsung Ue40f8000sl Ue46f8000sl Ue55f8000sl Ue65f8000sl Ue75f8000sl Chassis U90a PDFSiengNo ratings yet
- Interconnection Structures: Collection of Paths Connecting Various Modules Is Called As Interconnection StructureDocument22 pagesInterconnection Structures: Collection of Paths Connecting Various Modules Is Called As Interconnection Structuredomainname9No ratings yet
- VonNeumann ArchitectureDocument5 pagesVonNeumann ArchitectureBittu VermaNo ratings yet
- Buses /interconnection Structures: Dr. Syafiq Fauzi Bin KamarulzamanDocument42 pagesBuses /interconnection Structures: Dr. Syafiq Fauzi Bin KamarulzamanJolyn GanNo ratings yet
- BusesDocument5 pagesBusesderry6271No ratings yet
- Bus StructureDocument34 pagesBus StructureNoorullah ShariffNo ratings yet
- Computer Organization and ArchitectureDocument25 pagesComputer Organization and ArchitectureNeel RavalNo ratings yet
- Ch02 - System InterconnectionDocument29 pagesCh02 - System InterconnectionViet Quang VoNo ratings yet
- Unit 1 Computer ArchitectureDocument36 pagesUnit 1 Computer ArchitectureAnshulNo ratings yet
- Bus StructureDocument4 pagesBus StructureAbdul R3hmanNo ratings yet
- Unit 15 Bus StructureDocument32 pagesUnit 15 Bus StructureRennie KawanguNo ratings yet
- A Computer Consists of A Set of Components or Modules of Three Basic Types That Communicate With Each OtherDocument2 pagesA Computer Consists of A Set of Components or Modules of Three Basic Types That Communicate With Each OtherDawood lifeNo ratings yet
- TRB Computer - PG TRB Computer Instructor - Computer System Study Materials - Kalam Academy PDFDocument15 pagesTRB Computer - PG TRB Computer Instructor - Computer System Study Materials - Kalam Academy PDFJegaNo ratings yet
- TRB Computer - PG TRB Computer Instructor - Computer System Study Materials - Kalam AcademyDocument15 pagesTRB Computer - PG TRB Computer Instructor - Computer System Study Materials - Kalam AcademyJega50% (4)
- 03 - Top Level View of Computer Function and InterconnectionDocument64 pages03 - Top Level View of Computer Function and Interconnectionbree789No ratings yet
- CoaDocument19 pagesCoagagan.cseNo ratings yet
- Ca Module 1Document28 pagesCa Module 1Devan KaladharanNo ratings yet
- Coa Unit 1Document28 pagesCoa Unit 1vivek kumarNo ratings yet
- Computer Organization & Architecture Lecture #15 A View of Computer Function and Interconnection Interconnections StructuresDocument12 pagesComputer Organization & Architecture Lecture #15 A View of Computer Function and Interconnection Interconnections Structuresavdheshg_1No ratings yet
- Chapter 1lecture 1.5 (Buses) Notes+Homework+References+videoLinkDocument4 pagesChapter 1lecture 1.5 (Buses) Notes+Homework+References+videoLinkMeena Malik BaliharNo ratings yet
- William Stallings Computer Organization and Architecture 6 Edition System BusesDocument34 pagesWilliam Stallings Computer Organization and Architecture 6 Edition System BusesShakeel AwanNo ratings yet
- COA CH 5Document31 pagesCOA CH 5Bifa HirpoNo ratings yet
- Unit - II - Embedded Computing Platform Design: SyllabusDocument44 pagesUnit - II - Embedded Computing Platform Design: SyllabusSatish KumarNo ratings yet
- William Stallings Computer Organization and Architecture 7 Edition System BusesDocument50 pagesWilliam Stallings Computer Organization and Architecture 7 Edition System BusesRubeshan ShanNo ratings yet
- BusesDocument19 pagesBusesprasath67No ratings yet
- Lecture 1.1.5 (System Bus Structure-Data, Address and Control Bus)Document4 pagesLecture 1.1.5 (System Bus Structure-Data, Address and Control Bus)adityaNo ratings yet
- Sytem BusDocument24 pagesSytem BusRam RamNo ratings yet
- Whcamacho - It150-8 Chapter4 SGDocument7 pagesWhcamacho - It150-8 Chapter4 SGMICKAELA YEOGE BASCONo ratings yet
- Ecs 401 - Computer Organization Unit - I: BusesDocument8 pagesEcs 401 - Computer Organization Unit - I: BusesSannu KumarNo ratings yet
- 04 BusDocument23 pages04 BusAnonymous uUFY09No ratings yet
- The Collection of Paths Connecting The Various Modules of A Computer (CPU, Memory, I/O) Is Called The Interconnection StructureDocument3 pagesThe Collection of Paths Connecting The Various Modules of A Computer (CPU, Memory, I/O) Is Called The Interconnection StructureD KabipranavNo ratings yet
- Paper - History of Different Buses in A PCDocument20 pagesPaper - History of Different Buses in A PCammad ahmadNo ratings yet
- Unit 1Document22 pagesUnit 1bhaivarun65No ratings yet
- "Bus Interface-I" in (Microprocessor and Assembly Language)Document19 pages"Bus Interface-I" in (Microprocessor and Assembly Language)MUHAMMAD ABDULLAHNo ratings yet
- Top Level View of Computer Function and InterconnectionDocument62 pagesTop Level View of Computer Function and InterconnectionAhsan JameelNo ratings yet
- CH 03 p2 BusStructureDocument37 pagesCH 03 p2 BusStructureAnanda Haykel IskandarNo ratings yet
- Buses and InterconnectionDocument32 pagesBuses and Interconnectionather_88100% (1)
- Kalinga University Department of Computer ScienceDocument13 pagesKalinga University Department of Computer SciencePooja Singh ThakurNo ratings yet
- Unit - 6 Input/output Organization Introduction To Bus ArchitectureDocument14 pagesUnit - 6 Input/output Organization Introduction To Bus ArchitectureAyushi SinghNo ratings yet
- Computer Organization: Lec # 9: Bus System Bnar MustafaDocument29 pagesComputer Organization: Lec # 9: Bus System Bnar Mustafazara qojo (زارا)No ratings yet
- CPU Architecture: Control Unit (CU)Document10 pagesCPU Architecture: Control Unit (CU)i study100% (1)
- Interconnection StructuresDocument43 pagesInterconnection Structuresaryans1489% (36)
- Bus InterconnectionDocument11 pagesBus InterconnectionGame ZoneNo ratings yet
- Paper - History of Different Buses in A PCDocument21 pagesPaper - History of Different Buses in A PCammad ahmadNo ratings yet
- 01 BusesDocument38 pages01 Busesshriram1082883No ratings yet
- 3-Interconnection of Components - Overview of IAS Computer Function-06-01-2024Document12 pages3-Interconnection of Components - Overview of IAS Computer Function-06-01-2024vanchagargNo ratings yet
- William Stallings Computer Organization and Architecture: System BusesDocument47 pagesWilliam Stallings Computer Organization and Architecture: System BusesreinaldoopusNo ratings yet
- Module 5 Notes - COADocument6 pagesModule 5 Notes - COAAashu PrasadNo ratings yet
- CH 3 95Document46 pagesCH 3 95theo dominic silvosaNo ratings yet
- WINSEM2021-22 ECE3004 TH VL2021220501593 Reference Material I 10-01-2022 LECTURE 3-Interconnection of Components-Simple Bus InterconnectDocument23 pagesWINSEM2021-22 ECE3004 TH VL2021220501593 Reference Material I 10-01-2022 LECTURE 3-Interconnection of Components-Simple Bus InterconnectDarsh GuptaNo ratings yet
- of DesignDocument10 pagesof DesignPrabhudev PrabhudevNo ratings yet
- Computer Organization and ArchitectureDocument31 pagesComputer Organization and Architecture-AkhilGannamrajuNo ratings yet
- Types of Buses in Computer ArchitectureDocument2 pagesTypes of Buses in Computer ArchitectureOMKAR KUMARNo ratings yet
- Chapter 6 - IO (Part 2)Document42 pagesChapter 6 - IO (Part 2)Nurhidayatul FadhilahNo ratings yet
- Computer Buses: What Is A Bus?Document14 pagesComputer Buses: What Is A Bus?masumiNo ratings yet
- BUS InterconnectionDocument27 pagesBUS InterconnectionDEEPIKA PAVUNDOSS 20BEC0285No ratings yet
- 4Document12 pages4Abdulaziz TilahunNo ratings yet
- Bus InterconnectionDocument31 pagesBus InterconnectionAnonymous A72zb61100% (1)
- Lecture 2 (COA)Document16 pagesLecture 2 (COA)CSE-41-Rituparna MeherNo ratings yet
- 1-Part Class-2 Bus Structure in Computer ArchitectureDocument5 pages1-Part Class-2 Bus Structure in Computer ArchitectureEgwali AnnieNo ratings yet
- Grundfos CHI PumpDocument8 pagesGrundfos CHI PumpHamdi Al-sarooryNo ratings yet
- Lat2 2013Document11 pagesLat2 2013Faizah Nur ZaNo ratings yet
- 12.92 GHZ To 14.07 GHZ Mmic Vco With Half Frequency Output: Data SheetDocument12 pages12.92 GHZ To 14.07 GHZ Mmic Vco With Half Frequency Output: Data SheetgezahegnNo ratings yet
- K Series Manual 102010 - Original PDFDocument20 pagesK Series Manual 102010 - Original PDFrishub kanojiaNo ratings yet
- TransducersDocument24 pagesTransducersSania NowshinNo ratings yet
- 22626-2022-Summer-Model-Answer-Paper (Msbte Study Resources)Document18 pages22626-2022-Summer-Model-Answer-Paper (Msbte Study Resources)legend84461gamerNo ratings yet
- E WIMA MKP 4Document11 pagesE WIMA MKP 4kmyisusNo ratings yet
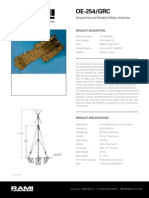
- Rami Mil Oe-254-GrcDocument1 pageRami Mil Oe-254-Grcspidermandude87No ratings yet
- Subject: Computer Fundamental Class: Bca & Bscit Sem - 01 Unit - 1: (Introduction To Computer)Document25 pagesSubject: Computer Fundamental Class: Bca & Bscit Sem - 01 Unit - 1: (Introduction To Computer)Patel PrinceNo ratings yet
- KolekcijaDocument257 pagesKolekcijaМилан ЛукићNo ratings yet
- AntennaDocument78 pagesAntennaSandeep Balhara33% (3)
- Introduction To Digital Signal ProcessingDocument21 pagesIntroduction To Digital Signal ProcessingnosgothsoulNo ratings yet
- JDSU hp3-60-p4Document4 pagesJDSU hp3-60-p4jesusNo ratings yet
- ICC9 ChassisDocument24 pagesICC9 Chassismsicoie1851No ratings yet
- Fatal1ty X370 Professional Gaming - multiQIG PDFDocument193 pagesFatal1ty X370 Professional Gaming - multiQIG PDFCristian Camilo Díaz DíazNo ratings yet
- Memory & Programmable Logic Devices: IndexDocument27 pagesMemory & Programmable Logic Devices: IndexAnonymous 1kEh0GvTgiNo ratings yet
- Lec5 A-Transmission Characteristics 1Document68 pagesLec5 A-Transmission Characteristics 1Sheref HeshamNo ratings yet
- Chapter 1 Solutions: Block Diagram of Water Level Digital Control SystemDocument4 pagesChapter 1 Solutions: Block Diagram of Water Level Digital Control SystemMichaelNo ratings yet
- Analog Voting Circuit Is More Flexible Than Its Digital VersionDocument2 pagesAnalog Voting Circuit Is More Flexible Than Its Digital VersionPPM0% (1)
- T5 Pro/T5: Quick GuideDocument2 pagesT5 Pro/T5: Quick GuideEttore PelliccioniNo ratings yet
- CAT Delta 30, 90 X-Ray - Service ManualDocument171 pagesCAT Delta 30, 90 X-Ray - Service ManualLuis Fernando Garcia SNo ratings yet
- JoseeDocument11 pagesJoseeJacquelyne MarioNo ratings yet
- Cummins 250KVA 1Document4 pagesCummins 250KVA 1Pio Roni100% (3)
- 2011 - DC Motor Control Using Ant Colony Optimization PDFDocument32 pages2011 - DC Motor Control Using Ant Colony Optimization PDFMatthew SilabanNo ratings yet
- Edt 135Document6 pagesEdt 135WilsonNo ratings yet
- Offshore Substation - Power TransmissionDocument2 pagesOffshore Substation - Power TransmissionJessica SimonNo ratings yet
- Choosing Core SizeDocument2 pagesChoosing Core SizeAnanda KrishnaNo ratings yet