Download as pptx, pdf, or txt
You might also like
- PDF Decoding Cardiac Electrophysiology Understanding The Techniques and Defining The Jargon Afzal Sohaib Ebook Full ChapterDocument53 pagesPDF Decoding Cardiac Electrophysiology Understanding The Techniques and Defining The Jargon Afzal Sohaib Ebook Full Chapterlinda.peterson910100% (4)
- Chapter FourDocument33 pagesChapter FourAlanoud AllaNo ratings yet
- Cubo 18Document21 pagesCubo 18Dago BiltonNo ratings yet
- Module 4-Part 1Document15 pagesModule 4-Part 1Muhammad FahimNo ratings yet
- Free Vibration Response of A SDOF SystemDocument14 pagesFree Vibration Response of A SDOF SystemBhind NijjarNo ratings yet
- Forced Vibration of Single Degree of FreedomDocument90 pagesForced Vibration of Single Degree of FreedomSamuel WozabNo ratings yet
- Forced Damped Vibrations - Chirayu (Regular 48), Darshil Shah (D To D 08), Parth Bhatt (D To D 10)Document21 pagesForced Damped Vibrations - Chirayu (Regular 48), Darshil Shah (D To D 08), Parth Bhatt (D To D 10)ChirayuOlkarNo ratings yet
- Damping FantasticDocument20 pagesDamping FantastickapolaNo ratings yet
- What Is The Damping ?Document20 pagesWhat Is The Damping ?Charan Tej Rudrala100% (1)
- Theory of VibrationDocument30 pagesTheory of VibrationCharles OndiekiNo ratings yet
- Lecture 2 - Undamped Free VibrationDocument5 pagesLecture 2 - Undamped Free VibrationMuhammad AffanNo ratings yet
- 3PMDocument18 pages3PMDaniyal AsifNo ratings yet
- Lecture 5Document9 pagesLecture 5Dario FuentesNo ratings yet
- TUSHAR - KANTI - SAHAMechanics-42020-04-19Mechanics-T.K. SAHA-Notes 4Document7 pagesTUSHAR - KANTI - SAHAMechanics-42020-04-19Mechanics-T.K. SAHA-Notes 4Anik GhoshNo ratings yet
- Law 1. Unless A Force Is Applied To A Particle It Will EitherDocument151 pagesLaw 1. Unless A Force Is Applied To A Particle It Will EitherSteve KrodaNo ratings yet
- Transient Vibrations of Sdof SystemsDocument10 pagesTransient Vibrations of Sdof Systemsnouiriachraf4No ratings yet
- Chapter 3-2Document14 pagesChapter 3-2Abdalmalek ShamsanNo ratings yet
- Syllabus 3006312720200429104518Document8 pagesSyllabus 3006312720200429104518YocobSamandrewsNo ratings yet
- Response To General Dynamic LoadingDocument9 pagesResponse To General Dynamic LoadingBhind NijjarNo ratings yet
- Damped: Unit 3 Harmonic MotionDocument22 pagesDamped: Unit 3 Harmonic MotionDikshantNo ratings yet
- 3.2 Forced Harmonic OscillationsDocument11 pages3.2 Forced Harmonic OscillationsKseniia KrupchakNo ratings yet
- ME 575 Advanced Fluid Mechanics Chapter 2 Fundamental EquationsDocument21 pagesME 575 Advanced Fluid Mechanics Chapter 2 Fundamental EquationsShuvo DasNo ratings yet
- The Principles of DynamicsDocument18 pagesThe Principles of Dynamicsafshin kkNo ratings yet
- Response To General Dynamic LoadingDocument12 pagesResponse To General Dynamic LoadingFernanda LagoNo ratings yet
- Chapter 3Document35 pagesChapter 3alikhalidd23No ratings yet
- Chapter 3-2Document13 pagesChapter 3-2الخليل إبراهيمNo ratings yet
- SRB Session1 RofsDocument4 pagesSRB Session1 RofsFullo Flores MarviloneNo ratings yet
- Session 1: Resultant of Force System: CouplesDocument4 pagesSession 1: Resultant of Force System: CouplesRhodoralyn Ilagan BalhagNo ratings yet
- VA&C - UNIT - II (Part-Two)Document107 pagesVA&C - UNIT - II (Part-Two)Dame AyaneNo ratings yet
- Formula Sheet UpdatedDocument10 pagesFormula Sheet UpdatedSania BatoolNo ratings yet
- Boundary Layer Theory Lecture 3 - 2024Document26 pagesBoundary Layer Theory Lecture 3 - 2024rishNo ratings yet
- Types of Damping 1. Viscous DampingDocument6 pagesTypes of Damping 1. Viscous DampingZandro GagoteNo ratings yet
- Advanced Structural Dynamics: Project Coordinator StudentDocument12 pagesAdvanced Structural Dynamics: Project Coordinator StudentAlin NegarăNo ratings yet
- Optics - Waves - Module 01 - Lecture 01Document16 pagesOptics - Waves - Module 01 - Lecture 01Brishav K. HalderNo ratings yet
- Experiment 7: ReadingDocument10 pagesExperiment 7: ReadingSinha SrishNo ratings yet
- Chapter 3 SHM - (Week 4)Document28 pagesChapter 3 SHM - (Week 4)SARA EMELIN FARISHA MUHAMAD FARIDNo ratings yet
- 4 B Spring Mass SystemsDocument18 pages4 B Spring Mass SystemsMatone MafologelaNo ratings yet
- PE3043 chpt5 Cuttings Transport 1Document19 pagesPE3043 chpt5 Cuttings Transport 1Ali Shan KakarNo ratings yet
- 053 - CE8021, CE6701 Structural Dynamics and Earthquake Engineering - 2 Marks 2Document116 pages053 - CE8021, CE6701 Structural Dynamics and Earthquake Engineering - 2 Marks 2Ankit Jose Antony0% (1)
- CH 2Document25 pagesCH 2dawit abebualNo ratings yet
- Chapter-2 - Free UnDamped VibrationsDocument12 pagesChapter-2 - Free UnDamped VibrationsMuhammad Daud AliNo ratings yet
- Lecture 8Document20 pagesLecture 8yakwetuNo ratings yet
- Unit IiDocument11 pagesUnit Iiaerolab instructorNo ratings yet
- UNIT - 4effect - of - Dampingchapter - 4 - DocDocument14 pagesUNIT - 4effect - of - Dampingchapter - 4 - DocDr. M.V.Krishna RaoNo ratings yet
- Chapter 2-2Document26 pagesChapter 2-2Ahmed Abdulbary AL-QarmNo ratings yet
- Rabi Oscillations in The Jaynes-Cummings Model: Name: Low Chi Yang Student ID: 1402951 Supervisor: DR Tan Eng KiangDocument100 pagesRabi Oscillations in The Jaynes-Cummings Model: Name: Low Chi Yang Student ID: 1402951 Supervisor: DR Tan Eng KiangLow Chi YangNo ratings yet
- Free Response Part 2Document23 pagesFree Response Part 2AswinNo ratings yet
- Harmonic OscillatorDocument11 pagesHarmonic OscillatorFelixNo ratings yet
- Lecture 1 Mechanical VibrationsDocument6 pagesLecture 1 Mechanical VibrationsRogelioB.AlobIINo ratings yet
- Primena Diferencijalnih Jednačina U Analizi VibracijaDocument8 pagesPrimena Diferencijalnih Jednačina U Analizi VibracijaLjiljanaNo ratings yet
- Harmonically Excited VibrationDocument48 pagesHarmonically Excited VibrationKhanh PhanNo ratings yet
- DampingDocument20 pagesDampingjudeekene_403330720100% (1)
- WEEKLY EXAM 3 ElementsDocument8 pagesWEEKLY EXAM 3 ElementsTEN SAMARITANo ratings yet
- Chapter 2-2Document18 pagesChapter 2-2الخليل إبراهيمNo ratings yet
- DOM M S D F Harmonical Excited Vibration 1Document90 pagesDOM M S D F Harmonical Excited Vibration 1Prajapati DhavalNo ratings yet
- 15.S Oscillations (Summary) .Preety BanrapdfDocument4 pages15.S Oscillations (Summary) .Preety BanrapdfPreety BanraNo ratings yet
- Chapter-2 - Free UnDamped VibrationsDocument31 pagesChapter-2 - Free UnDamped VibrationsMuhammad haider AyazNo ratings yet
- General Physics 1 Quarter 2: Module 3Document9 pagesGeneral Physics 1 Quarter 2: Module 3Maria Kriselle ApuhinNo ratings yet
- SD GRDocument17 pagesSD GRApril IngramNo ratings yet
- Harnessing Bistable Structural Dynamics: For Vibration Control, Energy Harvesting and SensingFrom EverandHarnessing Bistable Structural Dynamics: For Vibration Control, Energy Harvesting and SensingNo ratings yet
- Balasbaneh Et Al., 2018Document13 pagesBalasbaneh Et Al., 2018Fernanda LagoNo ratings yet
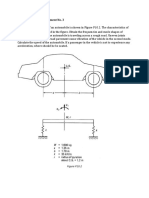
- CIVE 5106/2021 Assignment No. 3 10.2 A Simplified Model of An Automobile Is Shown in Figure P10.2. The Characteristics ofDocument3 pagesCIVE 5106/2021 Assignment No. 3 10.2 A Simplified Model of An Automobile Is Shown in Figure P10.2. The Characteristics ofFernanda LagoNo ratings yet
- Equations of Motion For A Single Degree-Of-Freedom SystemDocument42 pagesEquations of Motion For A Single Degree-Of-Freedom SystemFernanda LagoNo ratings yet
- Response To General Dynamic LoadingDocument12 pagesResponse To General Dynamic LoadingFernanda LagoNo ratings yet
- Chapter 12: Forced Dynamic Response of MDOF SystemsDocument11 pagesChapter 12: Forced Dynamic Response of MDOF SystemsFernanda LagoNo ratings yet
- Chapter 11: Numerical Solution of The Eigenvalue ProblemDocument24 pagesChapter 11: Numerical Solution of The Eigenvalue ProblemFernanda LagoNo ratings yet
- Analysis of SDOF Systems: Numerical MethodsDocument22 pagesAnalysis of SDOF Systems: Numerical MethodsFernanda LagoNo ratings yet
- Grad Faq June 23rd 2021Document13 pagesGrad Faq June 23rd 2021Fernanda LagoNo ratings yet
- Chapter 12: Forced Dynamic Response of MDOF SystemsDocument11 pagesChapter 12: Forced Dynamic Response of MDOF SystemsFernanda LagoNo ratings yet
- KEYWORDSSDocument3 pagesKEYWORDSSFernanda LagoNo ratings yet
- Escola de Educação Básica Bom Pastor English TestDocument2 pagesEscola de Educação Básica Bom Pastor English TestFernanda LagoNo ratings yet
- Vibration Serviceability of Footbridges Under Human-Induced Excitation: A Literature ReviewDocument74 pagesVibration Serviceability of Footbridges Under Human-Induced Excitation: A Literature ReviewFernanda LagoNo ratings yet
- Pórtico SimplesDocument3 pagesPórtico SimplesFernanda LagoNo ratings yet
- Vibration Serviceability Analysis of Aluminum Pedestrian Bridges Subjected To Crowd LoadingDocument8 pagesVibration Serviceability Analysis of Aluminum Pedestrian Bridges Subjected To Crowd LoadingFernanda LagoNo ratings yet
- Pórtico Com Barra InclinadaDocument3 pagesPórtico Com Barra InclinadaFernanda LagoNo ratings yet
- Brochure MK4 Post TensioningDocument36 pagesBrochure MK4 Post Tensioningaev65No ratings yet
- Leather Goods - Sialkot 2020Document12 pagesLeather Goods - Sialkot 2020Sanchita GuptaNo ratings yet
- 29 Degree Sakoian & AckerDocument4 pages29 Degree Sakoian & AckerALCHEMISTTNo ratings yet
- Gr9-12-Full Food and NutritionDocument30 pagesGr9-12-Full Food and NutritionSpynyfexNo ratings yet
- JKR Geotechnical SpecificationDocument9 pagesJKR Geotechnical SpecificationSousei No Keroberos100% (1)
- Berube Et Al 2003 - Laboratory and Field Investigations of The Influence of Sodium Chloride On ASRDocument8 pagesBerube Et Al 2003 - Laboratory and Field Investigations of The Influence of Sodium Chloride On ASRrodrigo.vilela.gorgaNo ratings yet
- Eep19 5Document38 pagesEep19 5Balamurugan ArumugamNo ratings yet
- 9-5 Complex Numbers and de Moivre - S TheoremDocument45 pages9-5 Complex Numbers and de Moivre - S Theorembinode100% (1)
- Msds LicowaxDocument5 pagesMsds LicowaxciswandiNo ratings yet
- MedianDocument7 pagesMedianBrian RogersNo ratings yet
- Designing A Bionic ArmDocument5 pagesDesigning A Bionic ArmSanrasniNo ratings yet
- Encyclopaedia of Popular Science (Steven N.shore)Document353 pagesEncyclopaedia of Popular Science (Steven N.shore)Muhammad Ali HaiderNo ratings yet
- Listado de Verbos Regulares E Irregulares Más Comunes en InglésDocument8 pagesListado de Verbos Regulares E Irregulares Más Comunes en InglésLogo DesingNo ratings yet
- TubosDocument12 pagesTubosASHIK TNo ratings yet
- Sunrise System 320 User GuideDocument21 pagesSunrise System 320 User GuideГрегори РобертNo ratings yet
- Conversion and CalculationDocument40 pagesConversion and CalculationJhonel MelgarNo ratings yet
- EFX By-Pass Level Transmitter - NewDocument32 pagesEFX By-Pass Level Transmitter - Newsaka dewaNo ratings yet
- HOMESPY The Invisible Sniffer of Infrared Remote Control of Smart TVsDocument18 pagesHOMESPY The Invisible Sniffer of Infrared Remote Control of Smart TVs123No ratings yet
- Revision From DRDocument11 pagesRevision From DRMahmoud GamalNo ratings yet
- Led LCD Monitor: Owner'S ManualDocument35 pagesLed LCD Monitor: Owner'S ManualJulia ONo ratings yet
- CASE STUDY - Smart Stores Reinvent The Retail SpaceDocument1 pageCASE STUDY - Smart Stores Reinvent The Retail Spacetranthihien29604No ratings yet
- Jsy Ea Ky : Vuqla/Kku Vfhkdyi VKSJ Ekud Laxbu Y (Kuå&226 011Document67 pagesJsy Ea Ky : Vuqla/Kku Vfhkdyi VKSJ Ekud Laxbu Y (Kuå&226 011Bala RajuNo ratings yet
- 0012-P180 PTG Sec 12Document9 pages0012-P180 PTG Sec 12dwsims100% (1)
- Descriptive TextDocument12 pagesDescriptive TextElin NurlenaNo ratings yet
- Drystar DT 5 BDocument4 pagesDrystar DT 5 BDinar Unyu La'uwa-uwaNo ratings yet
- Optimized For Best Performance in Clinical Chemistry TestingDocument18 pagesOptimized For Best Performance in Clinical Chemistry Testingvolodymyr saganenkoNo ratings yet
- wellplan英文教程Document1,006 pageswellplan英文教程xiguang LiuNo ratings yet
- STG-Final 4th Edtion 2021 - PDF - Doctor of Medicine - Sexually Transmitted InfectionDocument512 pagesSTG-Final 4th Edtion 2021 - PDF - Doctor of Medicine - Sexually Transmitted InfectionAbenezer AbrahamNo ratings yet