Download as pptx, pdf, or txt
You might also like
- Solution Manual For Elementary Linear Algebra Applications Version 11th Edition by AntonDocument128 pagesSolution Manual For Elementary Linear Algebra Applications Version 11th Edition by Antona88756243367% (45)
- Spreadsheet Modeling and Decision Analysis A Practical Introduction To Business Analytics 7th Edition Cliff Ragsdale Solutions ManualDocument14 pagesSpreadsheet Modeling and Decision Analysis A Practical Introduction To Business Analytics 7th Edition Cliff Ragsdale Solutions ManualShawnMitchellbfqyz92% (12)
- Applications of Linear Algebra in Game Development2Document8 pagesApplications of Linear Algebra in Game Development2VARANGANTI HARI PRATAP GOUTHAM 17110168No ratings yet
- Chapter 1: Systems of Linear Equations and MatricesDocument15 pagesChapter 1: Systems of Linear Equations and MatricesJenny VarelaNo ratings yet
- Gaussian EliminationDocument22 pagesGaussian Eliminationnefoxy100% (1)
- Solution Manual For Elementary Linear AlgebraDocument20 pagesSolution Manual For Elementary Linear AlgebraBila100% (1)
- Free Response Part 2Document23 pagesFree Response Part 2AswinNo ratings yet
- Problem StatementDocument18 pagesProblem StatementVAISHNAVI ARUN KOKADWAR 18110183No ratings yet
- MPCH 2Document9 pagesMPCH 223 1No ratings yet
- Eigenvalue Problems (Inverse Power Iteration With Shift Routine)Document15 pagesEigenvalue Problems (Inverse Power Iteration With Shift Routine)Dionysios ZeliosNo ratings yet
- Multi Degree of Freedom MDOF VibaratoryDocument40 pagesMulti Degree of Freedom MDOF Vibaratoryhanumantharaya100% (1)
- Lecture 29 PDFDocument3 pagesLecture 29 PDFMaha Omer BaniNo ratings yet
- Solving Multiple Regression Using MatrixDocument13 pagesSolving Multiple Regression Using Matrixdarren mapanooNo ratings yet
- Free Response Part 1Document18 pagesFree Response Part 1AriAdiSaputraNo ratings yet
- Unit 2 Chapter 4determinant Cramers RuleDocument9 pagesUnit 2 Chapter 4determinant Cramers RuleSarah TahiyatNo ratings yet
- EE731 Lecture Notes: Matrix Computations For Signal ProcessingDocument21 pagesEE731 Lecture Notes: Matrix Computations For Signal ProcessingKuruvachan K GeorgeNo ratings yet
- Report 20F-0145 - 20F-0193 - UpdatedDocument2 pagesReport 20F-0145 - 20F-0193 - UpdatedAshher AfzalNo ratings yet
- 1) Linearization and Iteration: Contributions by B. Kirby, R. Bhaskaran, and S. SantanaDocument2 pages1) Linearization and Iteration: Contributions by B. Kirby, R. Bhaskaran, and S. SantanaCehanNo ratings yet
- The Power Method For Eigenvectors: EigenvalueDocument14 pagesThe Power Method For Eigenvectors: EigenvalueGovind1085No ratings yet
- PRML Slides 3Document57 pagesPRML Slides 3Saurabh ShuklaNo ratings yet
- J JSV 2015 10 014Document13 pagesJ JSV 2015 10 014Partha SenguptaNo ratings yet
- Series Solution of Differential Equations: Concept MappingDocument17 pagesSeries Solution of Differential Equations: Concept MappingRayNo ratings yet
- Instructor's Solution Manual For Neural NetworksDocument40 pagesInstructor's Solution Manual For Neural NetworksshenalNo ratings yet
- Instructor Solution Manual To Neural Networks and Deep Learning A Textbook Solutions 3319944622 9783319944623 - CompressDocument40 pagesInstructor Solution Manual To Neural Networks and Deep Learning A Textbook Solutions 3319944622 9783319944623 - CompressHassam HafeezNo ratings yet
- Choosing Numbers For The Properties of Their SquaresDocument11 pagesChoosing Numbers For The Properties of Their SquaresHarshita ChaturvediNo ratings yet
- Numerical Methods For Civil EngineersDocument24 pagesNumerical Methods For Civil EngineersbhargavgadhviNo ratings yet
- Quadratic SieveDocument7 pagesQuadratic SieveSUBODH VERMA 17BCE1241No ratings yet
- Dinius Project PaperDocument8 pagesDinius Project PaperIman SatriaNo ratings yet
- Chapter 11Document33 pagesChapter 11prasanth_223No ratings yet
- 16 Substructuring Techniques and Wavelets For Domain DecompositionDocument8 pages16 Substructuring Techniques and Wavelets For Domain DecompositionslirpaNo ratings yet
- Linear Models: The Least-Squares Method, The Perceptron: A Heuristic Learning Algorithm ForDocument25 pagesLinear Models: The Least-Squares Method, The Perceptron: A Heuristic Learning Algorithm ForChrsan RamNo ratings yet
- CH 11Document34 pagesCH 11yashwanthr3No ratings yet
- Duality and Geometry in SVM ClassifiersDocument8 pagesDuality and Geometry in SVM ClassifiersSebastian CortesNo ratings yet
- Ch11 StanfordDocument33 pagesCh11 Stanfordno needNo ratings yet
- IMAC XIII 13th 13-13-2 A Tutorial Complex EigenvaluesDocument6 pagesIMAC XIII 13th 13-13-2 A Tutorial Complex EigenvaluesmghgolNo ratings yet
- Polynomial Curve Fitting in MatlabDocument3 pagesPolynomial Curve Fitting in MatlabKhan Arshid IqbalNo ratings yet
- Eigenvalues and Eigenvectors: An: Example. Consider The MatrixDocument23 pagesEigenvalues and Eigenvectors: An: Example. Consider The MatrixDisha KayandeNo ratings yet
- Series Solutions To Differential EquationsDocument14 pagesSeries Solutions To Differential EquationsbbteenagerNo ratings yet
- Chapter-3-Linear Models For RegressionDocument61 pagesChapter-3-Linear Models For Regressionlongfei zhang100% (1)
- MorphDocument20 pagesMorphYosueNo ratings yet
- 4session 6Document8 pages4session 6rajeshmholmukheNo ratings yet
- Determinants and Diagonalization - Linear AlgebraDocument44 pagesDeterminants and Diagonalization - Linear Algebraradhikaseelam1No ratings yet
- Cem Differential CalculusDocument33 pagesCem Differential CalculusoomganapathiNo ratings yet
- Engg AnalysisDocument117 pagesEngg AnalysisrajeshtaladiNo ratings yet
- Lagrange Housner HudsonDocument60 pagesLagrange Housner HudsonDanielMontesdeocaNo ratings yet
- 12 TG3102 Geostatistics II CoKrigingDocument34 pages12 TG3102 Geostatistics II CoKrigingTsamrotul JannahNo ratings yet
- Notes mth102Document8 pagesNotes mth102shivam shuklaNo ratings yet
- Product - Solution Eletromagnetismo HartyDocument9 pagesProduct - Solution Eletromagnetismo HartyAlex Sandro BoroskiNo ratings yet
- Module 3: Sampling and Reconstruction Problem Set 3Document20 pagesModule 3: Sampling and Reconstruction Problem Set 3aniNo ratings yet
- What Is CFD and Why? Numerical Solutions FD vs. FV (Vs. FE) FV For Transport Equation Temporal Discretisation 3d Transport EquationDocument26 pagesWhat Is CFD and Why? Numerical Solutions FD vs. FV (Vs. FE) FV For Transport Equation Temporal Discretisation 3d Transport EquationKishan KarkeraNo ratings yet
- InformationDocument3 pagesInformationLeanna Elsie JadielNo ratings yet
- Assignment 2Document7 pagesAssignment 2ue06037No ratings yet
- Wilson and Penzien DampingDocument6 pagesWilson and Penzien DampingAnonymous pEICfUhTPMNo ratings yet
- An Introduction To Cellular Automata and Their Applications: 1 Introduction - For The StudentDocument23 pagesAn Introduction To Cellular Automata and Their Applications: 1 Introduction - For The StudentHelena Martins CustódioNo ratings yet
- Unit V Graphical ModelsDocument23 pagesUnit V Graphical ModelsIndumathy ParanthamanNo ratings yet
- CS210 Lect07Document5 pagesCS210 Lect07aleyhaiderNo ratings yet
- EM May 2021Document3 pagesEM May 2021Shivam YadavNo ratings yet
- Vibrations of Multi-Degree of Freedom Systems: Simple Harmonic Motion That Passes Through Their Equilibrium PositionsDocument15 pagesVibrations of Multi-Degree of Freedom Systems: Simple Harmonic Motion That Passes Through Their Equilibrium PositionsMï XavierNo ratings yet
- Direct Linear Transformation: Practical Applications and Techniques in Computer VisionFrom EverandDirect Linear Transformation: Practical Applications and Techniques in Computer VisionNo ratings yet
- Balasbaneh Et Al., 2018Document13 pagesBalasbaneh Et Al., 2018Fernanda LagoNo ratings yet
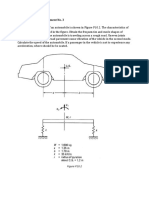
- CIVE 5106/2021 Assignment No. 3 10.2 A Simplified Model of An Automobile Is Shown in Figure P10.2. The Characteristics ofDocument3 pagesCIVE 5106/2021 Assignment No. 3 10.2 A Simplified Model of An Automobile Is Shown in Figure P10.2. The Characteristics ofFernanda LagoNo ratings yet
- Response To General Dynamic LoadingDocument12 pagesResponse To General Dynamic LoadingFernanda LagoNo ratings yet
- Chapter 12: Forced Dynamic Response of MDOF SystemsDocument11 pagesChapter 12: Forced Dynamic Response of MDOF SystemsFernanda LagoNo ratings yet
- Chapter 12: Forced Dynamic Response of MDOF SystemsDocument11 pagesChapter 12: Forced Dynamic Response of MDOF SystemsFernanda LagoNo ratings yet
- Analysis of SDOF Systems: Numerical MethodsDocument22 pagesAnalysis of SDOF Systems: Numerical MethodsFernanda LagoNo ratings yet
- Forced Harmonic Vibration: SDOF SystemDocument37 pagesForced Harmonic Vibration: SDOF SystemFernanda LagoNo ratings yet
- Grad Faq June 23rd 2021Document13 pagesGrad Faq June 23rd 2021Fernanda LagoNo ratings yet
- Equations of Motion For A Single Degree-Of-Freedom SystemDocument42 pagesEquations of Motion For A Single Degree-Of-Freedom SystemFernanda LagoNo ratings yet
- Vibration Serviceability Analysis of Aluminum Pedestrian Bridges Subjected To Crowd LoadingDocument8 pagesVibration Serviceability Analysis of Aluminum Pedestrian Bridges Subjected To Crowd LoadingFernanda LagoNo ratings yet
- Escola de Educação Básica Bom Pastor English TestDocument2 pagesEscola de Educação Básica Bom Pastor English TestFernanda LagoNo ratings yet
- KEYWORDSSDocument3 pagesKEYWORDSSFernanda LagoNo ratings yet
- Vibration Serviceability of Footbridges Under Human-Induced Excitation: A Literature ReviewDocument74 pagesVibration Serviceability of Footbridges Under Human-Induced Excitation: A Literature ReviewFernanda LagoNo ratings yet
- Pórtico SimplesDocument3 pagesPórtico SimplesFernanda LagoNo ratings yet
- Pórtico Com Barra InclinadaDocument3 pagesPórtico Com Barra InclinadaFernanda LagoNo ratings yet
- Help - Fsolve - MATLABDocument12 pagesHelp - Fsolve - MATLABGanderNo ratings yet
- Multilayer Perceptron Neural NetworkDocument8 pagesMultilayer Perceptron Neural NetworkMaryam FarisNo ratings yet
- Initialization: The Bisection Method Is Initialized by Specifying The Function F (X), TheDocument10 pagesInitialization: The Bisection Method Is Initialized by Specifying The Function F (X), TheKim Robert AradoNo ratings yet
- Regula FalsiDocument12 pagesRegula FalsiasdfghjNo ratings yet
- Asset-V1 MITx+6.86x+3T2020+typeasset+blockslides Lecture4 CompressedDocument22 pagesAsset-V1 MITx+6.86x+3T2020+typeasset+blockslides Lecture4 CompressedRahul VasanthNo ratings yet
- POLYNOMIALS Puzzle 1Document1 pagePOLYNOMIALS Puzzle 1Sekhar Reddy100% (3)
- Introduction To Brute ForceDocument13 pagesIntroduction To Brute ForceprithiksNo ratings yet
- Tensorflow Deep Learning With KerasDocument90 pagesTensorflow Deep Learning With Keraswick91274No ratings yet
- First Final Examination Math Grade 9Document2 pagesFirst Final Examination Math Grade 9Nick Bantolo100% (2)
- Operations Research - Exam HelperDocument5 pagesOperations Research - Exam HelperSriramkumar Mangalam SrinivasaraghavanNo ratings yet
- Question Possible Marks Actual Marks 1 6 2 6 3 6 Total 18Document4 pagesQuestion Possible Marks Actual Marks 1 6 2 6 3 6 Total 18Malcolm FenelonNo ratings yet
- Error Back Propagation AlgorithmDocument14 pagesError Back Propagation Algorithmkaran26121989No ratings yet
- XOR Problem Demonstration Using MATLABDocument19 pagesXOR Problem Demonstration Using MATLABal-amin shohag0% (1)
- Worksheet Sig Fig 9 11 08 PDFDocument2 pagesWorksheet Sig Fig 9 11 08 PDFzoohyun91720No ratings yet
- Week03 Answers PDFDocument8 pagesWeek03 Answers PDFvocal liiNo ratings yet
- Cs 501 Theory of Computation Jun 2020Document4 pagesCs 501 Theory of Computation Jun 2020Sanjay PrajapatiNo ratings yet
- Eee230 Engineering Optimization Using Soft Computing TH 1.00 Ac21Document1 pageEee230 Engineering Optimization Using Soft Computing TH 1.00 Ac21SharvanMvsNo ratings yet
- Distribution and Network Models: SolutionsDocument10 pagesDistribution and Network Models: SolutionsCovidNo ratings yet
- Fast Wavelet TransformDocument4 pagesFast Wavelet Transformbesty666No ratings yet
- ME F344 HandoutDocument3 pagesME F344 Handoutrushil guptaNo ratings yet
- Assignment 1Document2 pagesAssignment 1Vibhanshu PrajapatiNo ratings yet
- Chap 10 2 (1) - JacobianDocument8 pagesChap 10 2 (1) - JacobiansmaluqNo ratings yet
- Fibonicci: ExampleDocument7 pagesFibonicci: ExampleLester TanNo ratings yet
- Near Optimal Isosurface Extraction Algorithm Span SpaceDocument15 pagesNear Optimal Isosurface Extraction Algorithm Span SpaceParsa AminiNo ratings yet
- Pretrained ResNet-18 Convolutional Neural Network - MATLAB Resnet18Document2 pagesPretrained ResNet-18 Convolutional Neural Network - MATLAB Resnet18sidharth mahotraNo ratings yet
- Advanced Functions 12Document97 pagesAdvanced Functions 12Rishab AnandNo ratings yet
- DAA Approximation AlgorithmsDocument32 pagesDAA Approximation AlgorithmsAnn thabithaNo ratings yet
- KT 14503 Mathematics For Computing Group Assignment 20 MarksDocument7 pagesKT 14503 Mathematics For Computing Group Assignment 20 MarksAnnie LeonhartNo ratings yet