Download as pptx, pdf, or txt
You might also like
- SolutionsManual-Statistical and Adaptive Signal ProcessingDocument467 pagesSolutionsManual-Statistical and Adaptive Signal ProcessingkedirNo ratings yet
- TM 11446Document623 pagesTM 11446Bob SchmidtNo ratings yet
- Criminal HeartsDocument1 pageCriminal HeartsJared ChristmanNo ratings yet
- 1.case Study CTTS - Milestone 01 Scope DefinitionDocument6 pages1.case Study CTTS - Milestone 01 Scope DefinitionKashNo ratings yet
- 3-Filtering in The Frequency DomainDocument85 pages3-Filtering in The Frequency DomainSanjiv KushwahaNo ratings yet
- Lecture 3. Filtering in The Frequency DomainDocument123 pagesLecture 3. Filtering in The Frequency DomainAshish PatelNo ratings yet
- Fourier Relations in Optics: Near Field Far Field Frequency Pulse Duration Frequency Coherence LengthDocument54 pagesFourier Relations in Optics: Near Field Far Field Frequency Pulse Duration Frequency Coherence LengthLuis MesaNo ratings yet
- Continuous-Time Fourier Transform: Prof. Adnan KavakDocument14 pagesContinuous-Time Fourier Transform: Prof. Adnan Kavakhobi dunyamNo ratings yet
- L11 FourierPropertiesDocument14 pagesL11 FourierPropertiesCanio NoceNo ratings yet
- Chapter3 PDFDocument85 pagesChapter3 PDFmj kNo ratings yet
- Fourier Transform TableDocument8 pagesFourier Transform TableThe KingNo ratings yet
- Fourier Transform IIDocument34 pagesFourier Transform IIarkar myintNo ratings yet
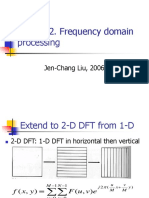
- Chap 4-2. Frequency Domain Processing: Jen-Chang Liu, 2006Document51 pagesChap 4-2. Frequency Domain Processing: Jen-Chang Liu, 2006Ashfiya ThahirNo ratings yet
- Chapter 4. Filtering in The Frequency Domain (1/2)Document34 pagesChapter 4. Filtering in The Frequency Domain (1/2)Ayoub MohammedNo ratings yet
- Physics Final - My VersionDocument48 pagesPhysics Final - My VersiondfbdbNo ratings yet
- Process Dynamic and Control - IntroDocument156 pagesProcess Dynamic and Control - IntroNuzul RamadhaniNo ratings yet
- Chapter 1-1Document31 pagesChapter 1-1lu huangNo ratings yet
- Signals and Systems Class 12Document20 pagesSignals and Systems Class 12wizarderbrNo ratings yet
- CS FourierDocument23 pagesCS FourierMuhammad ArslanNo ratings yet
- Fundamentals of Digital Signal ProcessingDocument26 pagesFundamentals of Digital Signal ProcessingNini LashariNo ratings yet
- Fourier TableDocument7 pagesFourier Tableamadjuna24No ratings yet
- Fourier PDFDocument8 pagesFourier PDFNaeemo IraqiNo ratings yet
- Fourier PDFDocument8 pagesFourier PDFNRMPNo ratings yet
- Table of Fourier Transform PairsDocument8 pagesTable of Fourier Transform Pairsujjal deyNo ratings yet
- Week 6Document21 pagesWeek 6Shehabeldeen Hesham Mahmoud AbdelmoatyNo ratings yet
- FourierDocument49 pagesFourierEl Pepe El PepeNo ratings yet
- Given: An Accelerometer, Whose Frequency Response Shows MagnitudeDocument4 pagesGiven: An Accelerometer, Whose Frequency Response Shows MagnitudeTrung PhanNo ratings yet
- Biasing and Transfer Characteristic of Mach-Zehnder Modulator (MZM) 1Document12 pagesBiasing and Transfer Characteristic of Mach-Zehnder Modulator (MZM) 1Ranjan KumarNo ratings yet
- Lect 7Document29 pagesLect 7Hermain KarimNo ratings yet
- W12 - Fourier Transform (Part 3)Document49 pagesW12 - Fourier Transform (Part 3)HermyraJ RobertNo ratings yet
- EE207 Min1 SolsDocument3 pagesEE207 Min1 SolsSumit BahlNo ratings yet
- Chapter 4: Filtering in The Frequency DomainDocument123 pagesChapter 4: Filtering in The Frequency DomainSandy ZakariaNo ratings yet
- Chapter 2Document7 pagesChapter 2Galal RabieNo ratings yet
- Formulas (EXAM)Document3 pagesFormulas (EXAM)Thanh Dat NguyenNo ratings yet
- The Fourier Transform: Jean Baptiste Joseph FourierDocument22 pagesThe Fourier Transform: Jean Baptiste Joseph FourierAbhinav_Batish_1810No ratings yet
- Computational Fluid Dynamics : February 28Document68 pagesComputational Fluid Dynamics : February 28Tatenda NyabadzaNo ratings yet
- ENGG2310A (Fall 2018) : Problem 1-1Document11 pagesENGG2310A (Fall 2018) : Problem 1-1Tsz Wing YipNo ratings yet
- Unit - 3.2 Analysis of CT SysDocument97 pagesUnit - 3.2 Analysis of CT SysmakNo ratings yet
- Unit - 3.2 Analysis of CT SysDocument97 pagesUnit - 3.2 Analysis of CT SysmakNo ratings yet
- Unit - 3.2 Analysis of CT SysDocument97 pagesUnit - 3.2 Analysis of CT SysmakNo ratings yet
- Fourier Transform PropertiesDocument1 pageFourier Transform PropertiessightlesswarriorNo ratings yet
- EN2090 Engineering Mathematics 2 Fourier Analysis: Prof. Adrian Porch DR Yue ZhouDocument17 pagesEN2090 Engineering Mathematics 2 Fourier Analysis: Prof. Adrian Porch DR Yue ZhouGhulam MujtabaNo ratings yet
- Applications of Laplace Transform: EEE111 Electric Circuit AnalysisDocument29 pagesApplications of Laplace Transform: EEE111 Electric Circuit AnalysisCHAYANIN AKETANANUNNo ratings yet
- Formulas (QUIZ)Document2 pagesFormulas (QUIZ)Thanh Dat NguyenNo ratings yet
- Signals and Systems For Signals and Systems ForDocument106 pagesSignals and Systems For Signals and Systems ForGandhi NapitupuluNo ratings yet
- Lect 8Document26 pagesLect 8Hermain KarimNo ratings yet
- Spectrum of Signal and SytemDocument9 pagesSpectrum of Signal and SytemXor YNo ratings yet
- Annotated Chap 4 G&WDocument124 pagesAnnotated Chap 4 G&WshellyNo ratings yet
- 02590733723a4-Assignment Fourier TransformDocument4 pages02590733723a4-Assignment Fourier TransformNeeraj KumarNo ratings yet
- Fallsem2019-20 Ece1004 Eth VL2019201000770 Cat-2 QP Key Cat 2 SSDocument4 pagesFallsem2019-20 Ece1004 Eth VL2019201000770 Cat-2 QP Key Cat 2 SSPina NasaNo ratings yet
- Signals and Systems Class 11Document16 pagesSignals and Systems Class 11wizarderbrNo ratings yet
- AlexanderCh18final R1Document19 pagesAlexanderCh18final R1utpNo ratings yet
- Frequency - Domain - and - TransformationsDocument40 pagesFrequency - Domain - and - Transformationsnithin sri sarveswarNo ratings yet
- Image Enhancement in The Frequency Domain: Spring 2006, Jen-Chang LiuDocument39 pagesImage Enhancement in The Frequency Domain: Spring 2006, Jen-Chang LiuJayaNo ratings yet
- Convolution For Discrete and Continuous Time SignalsDocument41 pagesConvolution For Discrete and Continuous Time SignalsnajlaNo ratings yet
- Ee320a Tut1Document2 pagesEe320a Tut1mohit kumarNo ratings yet
- EE207 Problem Set 1Document2 pagesEE207 Problem Set 1Rishabh AgarwalNo ratings yet
- Notes 9Document19 pagesNotes 9shaikhnida381No ratings yet
- Lec 1Document16 pagesLec 1Saisahan TNo ratings yet
- GATE-Electronics & Comm (ECE) - 2009Document21 pagesGATE-Electronics & Comm (ECE) - 2009Rajendra PrasadNo ratings yet
- The Plasma Dispersion Function: The Hilbert Transform of the GaussianFrom EverandThe Plasma Dispersion Function: The Hilbert Transform of the GaussianRating: 5 out of 5 stars5/5 (1)
- Lect35 Morphological ProcessingDocument21 pagesLect35 Morphological ProcessingnnehasinghNo ratings yet
- Digital Image Processing: Lect # 4Document17 pagesDigital Image Processing: Lect # 4nnehasinghNo ratings yet
- Lect32 - Color Processing-1Document23 pagesLect32 - Color Processing-1nnehasinghNo ratings yet
- Digital Image Processing: Lecture 8 and 9Document34 pagesDigital Image Processing: Lecture 8 and 9nnehasinghNo ratings yet
- Lect33 - Color Processing-2Document24 pagesLect33 - Color Processing-2nnehasinghNo ratings yet
- Digital Image Processing: Sampling and QuantizationDocument15 pagesDigital Image Processing: Sampling and QuantizationnnehasinghNo ratings yet
- Lect31 - Morphological ProcessingDocument21 pagesLect31 - Morphological ProcessingnnehasinghNo ratings yet
- Digital Image Processing: Lecture 9 and 10Document35 pagesDigital Image Processing: Lecture 9 and 10nnehasinghNo ratings yet
- Lect30 SegmentationDocument29 pagesLect30 SegmentationnnehasinghNo ratings yet
- Digital Image Processing: Lect # 4Document17 pagesDigital Image Processing: Lect # 4nnehasinghNo ratings yet
- Fundamentals of Image Processing: Lecture # 8Document6 pagesFundamentals of Image Processing: Lecture # 8nnehasinghNo ratings yet
- Lect11 - Image TransformsDocument14 pagesLect11 - Image TransformsnnehasinghNo ratings yet
- Fundamentals of Image Processing: Lect # 3Document17 pagesFundamentals of Image Processing: Lect # 3nnehasinghNo ratings yet
- Lect1 Crystal DefectsDocument29 pagesLect1 Crystal DefectsnnehasinghNo ratings yet
- Lect 1Document19 pagesLect 1nnehasinghNo ratings yet
- Fundamentals of Image Processing: Lect # 2 OutlineDocument17 pagesFundamentals of Image Processing: Lect # 2 OutlinennehasinghNo ratings yet
- Digital Image Processing: Lecture # 2Document18 pagesDigital Image Processing: Lecture # 2nnehasinghNo ratings yet
- EED7Document14 pagesEED7Hill HermitNo ratings yet
- Arcamebm CorpDocument20 pagesArcamebm CorpDumithJayathilakaNo ratings yet
- SQL Installation GuideDocument45 pagesSQL Installation GuideJoel SonNo ratings yet
- JG 5 - MMI Inspection Engineer (Facilities & Equipments)Document5 pagesJG 5 - MMI Inspection Engineer (Facilities & Equipments)bintogeorgev862No ratings yet
- Classes Laboratory Project Seminar Number of Hours of Organized Classes in University (ZZU) 30 15Document495 pagesClasses Laboratory Project Seminar Number of Hours of Organized Classes in University (ZZU) 30 15Javier Oyarzun GoyaldeNo ratings yet
- LoopDocument2 pagesLoopNgoc Vu TuanNo ratings yet
- ACFSDocument6 pagesACFSchandu518cseNo ratings yet
- Assignment 2 - Easyjet Flies High With Cloud ComputingDocument5 pagesAssignment 2 - Easyjet Flies High With Cloud ComputingSHAINA NOELLE AMANDORONNo ratings yet
- What Is Tiktok?: A Quick-Guide For Parents & TeensDocument2 pagesWhat Is Tiktok?: A Quick-Guide For Parents & TeensKurt Morin CantorNo ratings yet
- OOPs in C++ Lab Manual - 0Document41 pagesOOPs in C++ Lab Manual - 0TRUE LOVERSNo ratings yet
- HC-801LTE User Manual2019 IglesDocument36 pagesHC-801LTE User Manual2019 IglesFrancisco Javier Cernadas PintosNo ratings yet
- Brosura - Relee Vamp - 2012 (En)Document16 pagesBrosura - Relee Vamp - 2012 (En)Cata CatalinNo ratings yet
- Troubleshooting The Storage SystemDocument3 pagesTroubleshooting The Storage SystemDavid ChungNo ratings yet
- Annex-Specifications of HP ODU (V100R002C00 - 01)Document8 pagesAnnex-Specifications of HP ODU (V100R002C00 - 01)Дмитрий ЛаушкинNo ratings yet
- The Advanced Flight Deck For The Dornier Seastar: AerospaceDocument4 pagesThe Advanced Flight Deck For The Dornier Seastar: AerospaceShawyoo LeeNo ratings yet
- Dark Side of The InternetDocument273 pagesDark Side of The InternetMuntasir HashimNo ratings yet
- UntitledDocument119 pagesUntitledmegamaster0987654321No ratings yet
- Elderly Caregiver ResumeDocument8 pagesElderly Caregiver Resumevkggkayhf100% (1)
- Congestion Control Algorithm1Document5 pagesCongestion Control Algorithm1ksai.mbNo ratings yet
- Xii CS 2020-21Document5 pagesXii CS 2020-21Akshay SahuNo ratings yet
- CemNet Training Schedule 2021Document1 pageCemNet Training Schedule 2021Osman QaasimNo ratings yet
- Upload of SU24 Auth. Objects in SAP GRCDocument8 pagesUpload of SU24 Auth. Objects in SAP GRCSimhaa RajaNo ratings yet
- Conditional Statements and ExamplesDocument25 pagesConditional Statements and ExamplesZelop DrewNo ratings yet
- Lab Paper Final Term 20011598-138Document31 pagesLab Paper Final Term 20011598-138Zain AfzaalNo ratings yet
- Online PH Controller DPH 513Document48 pagesOnline PH Controller DPH 513s_krisrajNo ratings yet
- Ways To Find A UserexitDocument24 pagesWays To Find A UserexitJoy Chakravorty100% (1)
- HFE1210 Brounley PDFDocument8 pagesHFE1210 Brounley PDFlu1agpNo ratings yet