
Artificial Intelligence: Dr. Md. Nasim Adnan
Artificial Intelligence: Dr. Md. Nasim Adnan
You might also like
- 353 Laboratory Molecular Models Graded Activity Attempt ReviewDocument12 pages353 Laboratory Molecular Models Graded Activity Attempt ReviewJason Summat100% (1)
- Simoreg Spare PartsDocument34 pagesSimoreg Spare Partsiyilmaz1No ratings yet
- Pinto pm2 Ism ch10Document40 pagesPinto pm2 Ism ch10Jesha Carl JotojotNo ratings yet
- Chinese Immigrants & Angel Island - Irish Immigrants & Ellis IslandDocument5 pagesChinese Immigrants & Angel Island - Irish Immigrants & Ellis Islandapi-283669836No ratings yet
- Local Search AlgorithmsDocument14 pagesLocal Search AlgorithmsShreyas VaradkarNo ratings yet
- Chapter 4 - Beyond Classical Search - Complete - Ahmed GuessoumDocument60 pagesChapter 4 - Beyond Classical Search - Complete - Ahmed GuessoumRandaNo ratings yet
- Materi AI-006Document27 pagesMateri AI-006niferli julienNo ratings yet
- Lecture4 Local SearchDocument33 pagesLecture4 Local SearchRisinu WijesingheNo ratings yet
- 3 4optimizationDocument52 pages3 4optimizationashish.rawatNo ratings yet
- Local Search Algos - Hill Climbing Simulated Anesaling Beam Search AlgosDocument31 pagesLocal Search Algos - Hill Climbing Simulated Anesaling Beam Search AlgostusharNo ratings yet
- L6 LocalSearches1 08112022 013048pm 23032023 111320pm 24102023 053236pmDocument57 pagesL6 LocalSearches1 08112022 013048pm 23032023 111320pm 24102023 053236pmSaim ChishtiNo ratings yet
- Unit-2.3 Local Search Algo and Optimization ProblemsDocument18 pagesUnit-2.3 Local Search Algo and Optimization Problemsmani111111No ratings yet
- Unit 2 Part 1Document30 pagesUnit 2 Part 1abhinav vuppalaNo ratings yet
- Local Search and OptimizationDocument41 pagesLocal Search and OptimizationSupriya NevewaniNo ratings yet
- Artificial Intelligence: Beyond Classical SearchDocument29 pagesArtificial Intelligence: Beyond Classical SearchPrasidha PrabhuNo ratings yet
- AI Chapter04Document48 pagesAI Chapter04魏延任No ratings yet
- CS 2710, ISSP 2610: R&N Chapter 4.1 Local Search and OptimizationDocument35 pagesCS 2710, ISSP 2610: R&N Chapter 4.1 Local Search and OptimizationAltamashNo ratings yet
- Local Search and Optimization: (Based On Slides of Padhraic Smyth, Stuart Russell, Rao Kambhampati, Raj Rao, Dan Weld )Document44 pagesLocal Search and Optimization: (Based On Slides of Padhraic Smyth, Stuart Russell, Rao Kambhampati, Raj Rao, Dan Weld )BalajiNo ratings yet
- CO2-session 8 & 9: Session No: Session Topic: Local Search AlgorithmsDocument43 pagesCO2-session 8 & 9: Session No: Session Topic: Local Search Algorithmssunny bandelaNo ratings yet
- Problem Graphs Matching Hill ClimbingDocument32 pagesProblem Graphs Matching Hill ClimbingRaghu SomuNo ratings yet
- Inform Search Chapter4 3 6Document8 pagesInform Search Chapter4 3 6vaghelamiralNo ratings yet
- L05 Local Search AlgorithmsDocument21 pagesL05 Local Search AlgorithmsarabickathuNo ratings yet
- 06 Local SearchDocument29 pages06 Local SearchmalaikaNo ratings yet
- Local SearchDocument33 pagesLocal SearchFaizan AhmedNo ratings yet
- AI Module 3 PartialDocument29 pagesAI Module 3 Partialsaiyaswin2004No ratings yet
- Hill Climbing ALgorithmDocument19 pagesHill Climbing ALgorithmVikash YadavNo ratings yet
- Uad Local Search Opt Final-1Document35 pagesUad Local Search Opt Final-1PrashantyelekarNo ratings yet
- Hill ClimbingDocument12 pagesHill ClimbingVishesh YadavNo ratings yet
- Artificial Intelligence: Informed SearchDocument19 pagesArtificial Intelligence: Informed SearchalokchoudhuryNo ratings yet
- Informed SearchDocument27 pagesInformed SearchEwrwer EwrrwerNo ratings yet
- Unit-2 AiDocument119 pagesUnit-2 Ai2111cs030057No ratings yet
- Topic 3.6 Simulated AnnealingDocument19 pagesTopic 3.6 Simulated Annealingraju bhaiNo ratings yet
- Ar#ficial IntelligenceDocument18 pagesAr#ficial IntelligencePreti AroraNo ratings yet
- AI Lecture 9-10Document34 pagesAI Lecture 9-10Mohammad BangeeNo ratings yet
- Local Search Algorithms: Limitations of Search Tree Limitations of Search TreeDocument27 pagesLocal Search Algorithms: Limitations of Search Tree Limitations of Search TreeKarthickNo ratings yet
- Local Search and OptimizationDocument28 pagesLocal Search and OptimizationMazharulislamNo ratings yet
- Hill ClimbingDocument5 pagesHill Climbinggabby209No ratings yet
- Session 3 - Local SearchDocument34 pagesSession 3 - Local SearchAlfian RizkiNo ratings yet
- Institute of Southern Punjab Multan: Syed Zohair Quain Haider Lecturer ISP MultanDocument18 pagesInstitute of Southern Punjab Multan: Syed Zohair Quain Haider Lecturer ISP MultanCh MaaanNo ratings yet
- L4 OptimizationDocument51 pagesL4 Optimization1mysterious.iamNo ratings yet
- Informed Search: Chapter 4 (B)Document27 pagesInformed Search: Chapter 4 (B)SHAMAL DANDGENo ratings yet
- AI Assignment 2Document4 pagesAI Assignment 2abhiy92No ratings yet
- Hill ClimbingDocument17 pagesHill Climbingwevem43603No ratings yet
- AI Lab Assignmentc7Document5 pagesAI Lab Assignmentc7Sagar PrasadNo ratings yet
- Co 4Document56 pagesCo 4Gaddam YakeshreddyNo ratings yet
- Ch2-4-Problem Solving by SearchingDocument146 pagesCh2-4-Problem Solving by SearchingBầu Trời LớnNo ratings yet
- Artifical IntelligenceDocument22 pagesArtifical IntelligenceShubham KumarNo ratings yet
- 4.module3 INFORMED SEARCH 3Document48 pages4.module3 INFORMED SEARCH 3justadityabistNo ratings yet
- Lecture4 (Search)Document32 pagesLecture4 (Search)MalikUbaidNo ratings yet
- Informed SearchDocument25 pagesInformed SearchmonacmicsiaNo ratings yet
- Searching Techniques-Heuristic Search: Sanjay Jain Associate Professor, ITM-MCA, GwaliorDocument54 pagesSearching Techniques-Heuristic Search: Sanjay Jain Associate Professor, ITM-MCA, GwaliorSanjay JainNo ratings yet
- CS 561: Artificial Intelligence: Local SearchDocument51 pagesCS 561: Artificial Intelligence: Local Searchpeter hardyNo ratings yet
- Search StrategiesDocument16 pagesSearch StrategiesFranklin DorobaNo ratings yet
- Hill ClimbingDocument1 pageHill ClimbingVikas SharmaNo ratings yet
- Ai Question Bank 2Document20 pagesAi Question Bank 226- Amal SathyanNo ratings yet
- Hill Climbing AlgorithmDocument5 pagesHill Climbing AlgorithmBraj SubediNo ratings yet
- Lec 3Document29 pagesLec 3Akram TaNo ratings yet
- Hill Climbing Algorithm in Artificial IntelligenceDocument6 pagesHill Climbing Algorithm in Artificial Intelligencemissionps23No ratings yet
- We Will See A Different Form of Heuristic Search AppliedDocument17 pagesWe Will See A Different Form of Heuristic Search AppliedahsanulmNo ratings yet
- BlockDocument14 pagesBlockMai VanNo ratings yet
- Report On Ai - 041533Document11 pagesReport On Ai - 041533AnkitNo ratings yet
- Heuristic SearchDocument44 pagesHeuristic SearchVighneshwarMadasNo ratings yet
- Module 3 Probem SolvingDocument64 pagesModule 3 Probem Solvingafrozbhati1111No ratings yet
- Berkeleyme - CIMA Executive ProgramDocument22 pagesBerkeleyme - CIMA Executive ProgramMuhammad NaeemNo ratings yet
- Short Story ElementsDocument8 pagesShort Story Elementsaaliakhan05No ratings yet
- Simbulan Industries PhilippinesDocument9 pagesSimbulan Industries Philippinesefhjhaye_01No ratings yet
- A Letter To God (1) Flow ChartDocument13 pagesA Letter To God (1) Flow Chartsudharoy2008No ratings yet
- My Hell Vol.4 - Janez DrnovšekDocument6 pagesMy Hell Vol.4 - Janez DrnovšekAleksandar JankuloskiNo ratings yet
- Chevron Australia Project Overview - PPTDocument15 pagesChevron Australia Project Overview - PPTzawamaNo ratings yet
- ShowPDF Paper - AspxDocument14 pagesShowPDF Paper - AspxShawkat AhmadNo ratings yet
- L&T Aquaseal Butterfly Check Valves PDFDocument24 pagesL&T Aquaseal Butterfly Check Valves PDFnagtummalaNo ratings yet
- Group 2Document57 pagesGroup 2Lyka FigerNo ratings yet
- Snail AssignmentDocument7 pagesSnail AssignmentTekla FabriczyNo ratings yet
- Lesson 1 Measurement in PhysicsDocument11 pagesLesson 1 Measurement in PhysicsVea AnadonNo ratings yet
- RowcolDocument2 pagesRowcolAldhi PrastyaNo ratings yet
- Asme Code PresntDocument41 pagesAsme Code PresntPrasanth PadmanabhanNo ratings yet
- To The Captives: Kevin TuckerDocument15 pagesTo The Captives: Kevin TuckerMiguel SoutoNo ratings yet
- Experiment 2 Conservation of Angular Momentum: I. ObjectivesDocument9 pagesExperiment 2 Conservation of Angular Momentum: I. ObjectivesFelixNo ratings yet
- Fiber Optic Cable Blowing MachinesDocument7 pagesFiber Optic Cable Blowing MachinesDiar FatahNo ratings yet
- Wizard S AideDocument58 pagesWizard S AideKnightsbridge~No ratings yet
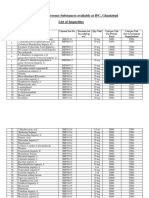
- List of IP Reference Substances Available at IPC, Ghaziabad List of ImpuritiesDocument4 pagesList of IP Reference Substances Available at IPC, Ghaziabad List of ImpuritiesUrva VasavadaNo ratings yet
- Implement A Verilog Model and Display The Output For A Set of Sample Data Together With The Wave Form Obtained For The Problems Given BelowDocument6 pagesImplement A Verilog Model and Display The Output For A Set of Sample Data Together With The Wave Form Obtained For The Problems Given Belowlilly pushparaniNo ratings yet
- Duane Big EagleDocument3 pagesDuane Big EagleSergio StaniulisNo ratings yet
- The Ice Creamery CookbookDocument18 pagesThe Ice Creamery CookbookWeldon Owen Publishing83% (12)
- v2 SDO ISABELA LEARNING RECOVERY PLANDocument16 pagesv2 SDO ISABELA LEARNING RECOVERY PLANRoland Mark DumaliangNo ratings yet
- Prabhat Yadav Exam FormDocument7 pagesPrabhat Yadav Exam FormMD ANASNo ratings yet
- Worksheet (2023-24) Grade: 10 Subject: Information TechnologyDocument49 pagesWorksheet (2023-24) Grade: 10 Subject: Information TechnologyINFWHATNo ratings yet
- Joint Patterns - Retaining WallDocument3 pagesJoint Patterns - Retaining WallFeby Adryan SitorusNo ratings yet
- Accounting Unit Additional Execerses AA025 Sem 2, 2019/2020Document5 pagesAccounting Unit Additional Execerses AA025 Sem 2, 2019/2020nur athirahNo ratings yet

























































































Download as pptx, pdf, or txt
You might also like
- 353 Laboratory Molecular Models Graded Activity Attempt ReviewDocument12 pages353 Laboratory Molecular Models Graded Activity Attempt ReviewJason Summat100% (1)
- Simoreg Spare PartsDocument34 pagesSimoreg Spare Partsiyilmaz1No ratings yet
- Pinto pm2 Ism ch10Document40 pagesPinto pm2 Ism ch10Jesha Carl JotojotNo ratings yet
- Chinese Immigrants & Angel Island - Irish Immigrants & Ellis IslandDocument5 pagesChinese Immigrants & Angel Island - Irish Immigrants & Ellis Islandapi-283669836No ratings yet
- Local Search AlgorithmsDocument14 pagesLocal Search AlgorithmsShreyas VaradkarNo ratings yet
- Chapter 4 - Beyond Classical Search - Complete - Ahmed GuessoumDocument60 pagesChapter 4 - Beyond Classical Search - Complete - Ahmed GuessoumRandaNo ratings yet
- Materi AI-006Document27 pagesMateri AI-006niferli julienNo ratings yet
- Lecture4 Local SearchDocument33 pagesLecture4 Local SearchRisinu WijesingheNo ratings yet
- 3 4optimizationDocument52 pages3 4optimizationashish.rawatNo ratings yet
- Local Search Algos - Hill Climbing Simulated Anesaling Beam Search AlgosDocument31 pagesLocal Search Algos - Hill Climbing Simulated Anesaling Beam Search AlgostusharNo ratings yet
- L6 LocalSearches1 08112022 013048pm 23032023 111320pm 24102023 053236pmDocument57 pagesL6 LocalSearches1 08112022 013048pm 23032023 111320pm 24102023 053236pmSaim ChishtiNo ratings yet
- Unit-2.3 Local Search Algo and Optimization ProblemsDocument18 pagesUnit-2.3 Local Search Algo and Optimization Problemsmani111111No ratings yet
- Unit 2 Part 1Document30 pagesUnit 2 Part 1abhinav vuppalaNo ratings yet
- Local Search and OptimizationDocument41 pagesLocal Search and OptimizationSupriya NevewaniNo ratings yet
- Artificial Intelligence: Beyond Classical SearchDocument29 pagesArtificial Intelligence: Beyond Classical SearchPrasidha PrabhuNo ratings yet
- AI Chapter04Document48 pagesAI Chapter04魏延任No ratings yet
- CS 2710, ISSP 2610: R&N Chapter 4.1 Local Search and OptimizationDocument35 pagesCS 2710, ISSP 2610: R&N Chapter 4.1 Local Search and OptimizationAltamashNo ratings yet
- Local Search and Optimization: (Based On Slides of Padhraic Smyth, Stuart Russell, Rao Kambhampati, Raj Rao, Dan Weld )Document44 pagesLocal Search and Optimization: (Based On Slides of Padhraic Smyth, Stuart Russell, Rao Kambhampati, Raj Rao, Dan Weld )BalajiNo ratings yet
- CO2-session 8 & 9: Session No: Session Topic: Local Search AlgorithmsDocument43 pagesCO2-session 8 & 9: Session No: Session Topic: Local Search Algorithmssunny bandelaNo ratings yet
- Problem Graphs Matching Hill ClimbingDocument32 pagesProblem Graphs Matching Hill ClimbingRaghu SomuNo ratings yet
- Inform Search Chapter4 3 6Document8 pagesInform Search Chapter4 3 6vaghelamiralNo ratings yet
- L05 Local Search AlgorithmsDocument21 pagesL05 Local Search AlgorithmsarabickathuNo ratings yet
- 06 Local SearchDocument29 pages06 Local SearchmalaikaNo ratings yet
- Local SearchDocument33 pagesLocal SearchFaizan AhmedNo ratings yet
- AI Module 3 PartialDocument29 pagesAI Module 3 Partialsaiyaswin2004No ratings yet
- Hill Climbing ALgorithmDocument19 pagesHill Climbing ALgorithmVikash YadavNo ratings yet
- Uad Local Search Opt Final-1Document35 pagesUad Local Search Opt Final-1PrashantyelekarNo ratings yet
- Hill ClimbingDocument12 pagesHill ClimbingVishesh YadavNo ratings yet
- Artificial Intelligence: Informed SearchDocument19 pagesArtificial Intelligence: Informed SearchalokchoudhuryNo ratings yet
- Informed SearchDocument27 pagesInformed SearchEwrwer EwrrwerNo ratings yet
- Unit-2 AiDocument119 pagesUnit-2 Ai2111cs030057No ratings yet
- Topic 3.6 Simulated AnnealingDocument19 pagesTopic 3.6 Simulated Annealingraju bhaiNo ratings yet
- Ar#ficial IntelligenceDocument18 pagesAr#ficial IntelligencePreti AroraNo ratings yet
- AI Lecture 9-10Document34 pagesAI Lecture 9-10Mohammad BangeeNo ratings yet
- Local Search Algorithms: Limitations of Search Tree Limitations of Search TreeDocument27 pagesLocal Search Algorithms: Limitations of Search Tree Limitations of Search TreeKarthickNo ratings yet
- Local Search and OptimizationDocument28 pagesLocal Search and OptimizationMazharulislamNo ratings yet
- Hill ClimbingDocument5 pagesHill Climbinggabby209No ratings yet
- Session 3 - Local SearchDocument34 pagesSession 3 - Local SearchAlfian RizkiNo ratings yet
- Institute of Southern Punjab Multan: Syed Zohair Quain Haider Lecturer ISP MultanDocument18 pagesInstitute of Southern Punjab Multan: Syed Zohair Quain Haider Lecturer ISP MultanCh MaaanNo ratings yet
- L4 OptimizationDocument51 pagesL4 Optimization1mysterious.iamNo ratings yet
- Informed Search: Chapter 4 (B)Document27 pagesInformed Search: Chapter 4 (B)SHAMAL DANDGENo ratings yet
- AI Assignment 2Document4 pagesAI Assignment 2abhiy92No ratings yet
- Hill ClimbingDocument17 pagesHill Climbingwevem43603No ratings yet
- AI Lab Assignmentc7Document5 pagesAI Lab Assignmentc7Sagar PrasadNo ratings yet
- Co 4Document56 pagesCo 4Gaddam YakeshreddyNo ratings yet
- Ch2-4-Problem Solving by SearchingDocument146 pagesCh2-4-Problem Solving by SearchingBầu Trời LớnNo ratings yet
- Artifical IntelligenceDocument22 pagesArtifical IntelligenceShubham KumarNo ratings yet
- 4.module3 INFORMED SEARCH 3Document48 pages4.module3 INFORMED SEARCH 3justadityabistNo ratings yet
- Lecture4 (Search)Document32 pagesLecture4 (Search)MalikUbaidNo ratings yet
- Informed SearchDocument25 pagesInformed SearchmonacmicsiaNo ratings yet
- Searching Techniques-Heuristic Search: Sanjay Jain Associate Professor, ITM-MCA, GwaliorDocument54 pagesSearching Techniques-Heuristic Search: Sanjay Jain Associate Professor, ITM-MCA, GwaliorSanjay JainNo ratings yet
- CS 561: Artificial Intelligence: Local SearchDocument51 pagesCS 561: Artificial Intelligence: Local Searchpeter hardyNo ratings yet
- Search StrategiesDocument16 pagesSearch StrategiesFranklin DorobaNo ratings yet
- Hill ClimbingDocument1 pageHill ClimbingVikas SharmaNo ratings yet
- Ai Question Bank 2Document20 pagesAi Question Bank 226- Amal SathyanNo ratings yet
- Hill Climbing AlgorithmDocument5 pagesHill Climbing AlgorithmBraj SubediNo ratings yet
- Lec 3Document29 pagesLec 3Akram TaNo ratings yet
- Hill Climbing Algorithm in Artificial IntelligenceDocument6 pagesHill Climbing Algorithm in Artificial Intelligencemissionps23No ratings yet
- We Will See A Different Form of Heuristic Search AppliedDocument17 pagesWe Will See A Different Form of Heuristic Search AppliedahsanulmNo ratings yet
- BlockDocument14 pagesBlockMai VanNo ratings yet
- Report On Ai - 041533Document11 pagesReport On Ai - 041533AnkitNo ratings yet
- Heuristic SearchDocument44 pagesHeuristic SearchVighneshwarMadasNo ratings yet
- Module 3 Probem SolvingDocument64 pagesModule 3 Probem Solvingafrozbhati1111No ratings yet
- Berkeleyme - CIMA Executive ProgramDocument22 pagesBerkeleyme - CIMA Executive ProgramMuhammad NaeemNo ratings yet
- Short Story ElementsDocument8 pagesShort Story Elementsaaliakhan05No ratings yet
- Simbulan Industries PhilippinesDocument9 pagesSimbulan Industries Philippinesefhjhaye_01No ratings yet
- A Letter To God (1) Flow ChartDocument13 pagesA Letter To God (1) Flow Chartsudharoy2008No ratings yet
- My Hell Vol.4 - Janez DrnovšekDocument6 pagesMy Hell Vol.4 - Janez DrnovšekAleksandar JankuloskiNo ratings yet
- Chevron Australia Project Overview - PPTDocument15 pagesChevron Australia Project Overview - PPTzawamaNo ratings yet
- ShowPDF Paper - AspxDocument14 pagesShowPDF Paper - AspxShawkat AhmadNo ratings yet
- L&T Aquaseal Butterfly Check Valves PDFDocument24 pagesL&T Aquaseal Butterfly Check Valves PDFnagtummalaNo ratings yet
- Group 2Document57 pagesGroup 2Lyka FigerNo ratings yet
- Snail AssignmentDocument7 pagesSnail AssignmentTekla FabriczyNo ratings yet
- Lesson 1 Measurement in PhysicsDocument11 pagesLesson 1 Measurement in PhysicsVea AnadonNo ratings yet
- RowcolDocument2 pagesRowcolAldhi PrastyaNo ratings yet
- Asme Code PresntDocument41 pagesAsme Code PresntPrasanth PadmanabhanNo ratings yet
- To The Captives: Kevin TuckerDocument15 pagesTo The Captives: Kevin TuckerMiguel SoutoNo ratings yet
- Experiment 2 Conservation of Angular Momentum: I. ObjectivesDocument9 pagesExperiment 2 Conservation of Angular Momentum: I. ObjectivesFelixNo ratings yet
- Fiber Optic Cable Blowing MachinesDocument7 pagesFiber Optic Cable Blowing MachinesDiar FatahNo ratings yet
- Wizard S AideDocument58 pagesWizard S AideKnightsbridge~No ratings yet
- List of IP Reference Substances Available at IPC, Ghaziabad List of ImpuritiesDocument4 pagesList of IP Reference Substances Available at IPC, Ghaziabad List of ImpuritiesUrva VasavadaNo ratings yet
- Implement A Verilog Model and Display The Output For A Set of Sample Data Together With The Wave Form Obtained For The Problems Given BelowDocument6 pagesImplement A Verilog Model and Display The Output For A Set of Sample Data Together With The Wave Form Obtained For The Problems Given Belowlilly pushparaniNo ratings yet
- Duane Big EagleDocument3 pagesDuane Big EagleSergio StaniulisNo ratings yet
- The Ice Creamery CookbookDocument18 pagesThe Ice Creamery CookbookWeldon Owen Publishing83% (12)
- v2 SDO ISABELA LEARNING RECOVERY PLANDocument16 pagesv2 SDO ISABELA LEARNING RECOVERY PLANRoland Mark DumaliangNo ratings yet
- Prabhat Yadav Exam FormDocument7 pagesPrabhat Yadav Exam FormMD ANASNo ratings yet
- Worksheet (2023-24) Grade: 10 Subject: Information TechnologyDocument49 pagesWorksheet (2023-24) Grade: 10 Subject: Information TechnologyINFWHATNo ratings yet
- Joint Patterns - Retaining WallDocument3 pagesJoint Patterns - Retaining WallFeby Adryan SitorusNo ratings yet
- Accounting Unit Additional Execerses AA025 Sem 2, 2019/2020Document5 pagesAccounting Unit Additional Execerses AA025 Sem 2, 2019/2020nur athirahNo ratings yet