Download as pptx, pdf, or txt
You might also like
- Bt50 Electr.Document32 pagesBt50 Electr.SenaMecánicaElectrónicaNo ratings yet
- AOMEI® Partition Assistant User ManualDocument66 pagesAOMEI® Partition Assistant User ManualDred Ched0% (1)
- EtsyBusinessModel PDFDocument1 pageEtsyBusinessModel PDFChâu TheSheep100% (1)
- Lecture-2 Transfer FunctionDocument32 pagesLecture-2 Transfer FunctionMuneeb JawaidNo ratings yet
- Control Systems (CS) : Lecture-2 Transfer Function and Stability of LTI SystemsDocument35 pagesControl Systems (CS) : Lecture-2 Transfer Function and Stability of LTI SystemsAdil KhanNo ratings yet
- Feedback Control Systems (FCS) : Lecture-2 Transfer Function and Stability of LTI SystemsDocument29 pagesFeedback Control Systems (FCS) : Lecture-2 Transfer Function and Stability of LTI SystemsRomadhonFitriyantoNo ratings yet
- Transfer FunctionDocument34 pagesTransfer FunctionRIMSHA KHURSHID100% (1)
- Feedback Control Systems (FCS) : Lecture-3 & 4 Transfer Function and Stability of LTI SystemsDocument30 pagesFeedback Control Systems (FCS) : Lecture-3 & 4 Transfer Function and Stability of LTI SystemsZaheer AhamedNo ratings yet
- Control Chapter 1 - Lecture 1Document29 pagesControl Chapter 1 - Lecture 13re0oooNo ratings yet
- Transfer Function Basics & Transfer Function and StabilityDocument31 pagesTransfer Function Basics & Transfer Function and StabilityArvind kumar PrajapatiNo ratings yet
- Chapter 2.2 Dynamic - NewDocument36 pagesChapter 2.2 Dynamic - Newmeseretyalew2014No ratings yet
- Control Systems (CS) : Lecture-2 Laplace Transform Transfer Function and Stability of LTI SystemsDocument41 pagesControl Systems (CS) : Lecture-2 Laplace Transform Transfer Function and Stability of LTI Systemskamranzeb057No ratings yet
- Control Systems (CS) : Lecture-2 Transfer Function and Stability of LTI SystemsDocument37 pagesControl Systems (CS) : Lecture-2 Transfer Function and Stability of LTI SystemsSuyash Dahake VlogsNo ratings yet
- Poles and ZerosDocument29 pagesPoles and ZerosJane Erestain BuenaobraNo ratings yet
- Modeling of Systems (2) : Majid Medhat Saeed Phd. Student Mechanical Engineering DepartmentDocument34 pagesModeling of Systems (2) : Majid Medhat Saeed Phd. Student Mechanical Engineering Departmentماجد مدحت سعيدNo ratings yet
- 30 Transfer Function and Frequency ResponseDocument54 pages30 Transfer Function and Frequency ResponseKARTHIK S SNo ratings yet
- Lec#19-24 - Laplace DomainDocument42 pagesLec#19-24 - Laplace DomainDaniya AbbasiNo ratings yet
- NMB34203 - ch2 - Mathematical ModelDocument47 pagesNMB34203 - ch2 - Mathematical ModelfatinNo ratings yet
- Laplace Transform Converges Fourier TransformDocument14 pagesLaplace Transform Converges Fourier TransformSupriyaNo ratings yet
- Lecture 5-Mathematical Modeling of Mechanical SystemsDocument93 pagesLecture 5-Mathematical Modeling of Mechanical SystemsNoor Ahmed100% (2)
- W3a PDFDocument26 pagesW3a PDFShujah RashidNo ratings yet
- Thuật Toán Điều Khiển1Document23 pagesThuật Toán Điều Khiển1Văn Nghĩa NguyễnNo ratings yet
- (12 - 2) Laplace Transform v2Document23 pages(12 - 2) Laplace Transform v2najla harzaNo ratings yet
- Advanced Control Systems (ACS) : Transfer Function and Stability of LTI SystemsDocument22 pagesAdvanced Control Systems (ACS) : Transfer Function and Stability of LTI SystemsFahmeed Ali MeoNo ratings yet
- Chapter - 2 - Mathematical Models of Systems - W2015Document75 pagesChapter - 2 - Mathematical Models of Systems - W2015120200421003nNo ratings yet
- Week 1B - Online Classes - S2020Document25 pagesWeek 1B - Online Classes - S2020Muhammad Tayyab YousafzaiNo ratings yet
- Digital Control System - CompressedDocument18 pagesDigital Control System - CompressedSukhpal SinghNo ratings yet
- Chap 2 1 Modeling in Freq 1Document48 pagesChap 2 1 Modeling in Freq 1Furkan DedeNo ratings yet
- ECNG-3212 Lecture 02Document46 pagesECNG-3212 Lecture 02hiwot222712No ratings yet
- Chapter 2 - Mathematical ModellingDocument19 pagesChapter 2 - Mathematical ModellingANDREW LEONG CHUN TATT STUDENTNo ratings yet
- Transfer Function and Mathematical ModelingDocument32 pagesTransfer Function and Mathematical ModelingsivaramNo ratings yet
- EE331 - L09 - Signals & SystemsDocument51 pagesEE331 - L09 - Signals & Systemsahmetyasinbulut99No ratings yet
- Lecture 1: Digital Control SystemsDocument57 pagesLecture 1: Digital Control SystemsMeer Zafarullah NoohaniNo ratings yet
- 1 Control Bachelor MathDocument31 pages1 Control Bachelor MathJamal awdiNo ratings yet
- Week 3Document26 pagesWeek 3salim ucarNo ratings yet
- Modeling of Mechanical SystemsDocument26 pagesModeling of Mechanical SystemsMD MUSFIQUR RAHMAN100% (1)
- Feedback Midterms 2Document32 pagesFeedback Midterms 2John Railey P. PamintuanNo ratings yet
- 07 Poles and Zeros of Transfer FunctionDocument33 pages07 Poles and Zeros of Transfer FunctionRyan VasquezNo ratings yet
- Funda of Multivariable ControlDocument69 pagesFunda of Multivariable Controlኪዳንኪ ማርያም ዘኢየሀልቅNo ratings yet
- Lecture 2Document47 pagesLecture 2Houssam moussaNo ratings yet
- M15 - Laplace Transforms 11 15Document4 pagesM15 - Laplace Transforms 11 15subyNo ratings yet
- Chapter 1Document57 pagesChapter 1Emilia HermitNo ratings yet
- Discrete Time DomainDocument28 pagesDiscrete Time DomainfurqanNo ratings yet
- Lecture 4 - 5Document78 pagesLecture 4 - 5rachit guptaNo ratings yet
- Poles Zeros and Z TransformDocument12 pagesPoles Zeros and Z TransformAhosan HabibNo ratings yet
- LN2 (Electrical Systems)Document38 pagesLN2 (Electrical Systems)Deniz DemirNo ratings yet
- Module 2 - Lecture 3Document31 pagesModule 2 - Lecture 3lvrevathiNo ratings yet
- Eee2001 NT Module 2 l3Document8 pagesEee2001 NT Module 2 l3akshata bhatNo ratings yet
- W3B PDFDocument17 pagesW3B PDFShujah RashidNo ratings yet
- Nonlinear Control of A Single-Link Flexible Joint Manipulator Using Differential FlatnessDocument6 pagesNonlinear Control of A Single-Link Flexible Joint Manipulator Using Differential Flatnessanon_93685582No ratings yet
- Chapter-1: 1.1 Control Design ProcedureDocument23 pagesChapter-1: 1.1 Control Design ProcedureWildan MumtazNo ratings yet
- Poles and Zeros of Transfer FunctionDocument34 pagesPoles and Zeros of Transfer FunctionRyan VasquezNo ratings yet
- 2018 EE305 New SolutionDocument25 pages2018 EE305 New SolutionJasa R ChoudharyNo ratings yet
- Week 2A - Online Classes - S2020Document17 pagesWeek 2A - Online Classes - S2020Muhammad Tayyab YousafzaiNo ratings yet
- Feedback Lesson 5Document2 pagesFeedback Lesson 5Neo BataclanNo ratings yet
- Funda MIMODocument69 pagesFunda MIMOኪዳንኪ ማርያም ዘኢየሀልቅNo ratings yet
- Exam Examples Questions With SolutionDocument9 pagesExam Examples Questions With Solutionteektak1No ratings yet
- FCS Lab2Document36 pagesFCS Lab2muhammadNo ratings yet
- Chp1 2Document113 pagesChp1 2Wondatir GoshimNo ratings yet
- Control Engineering ME - 4012: Instructor Muhammad Rizwan SiddiquiDocument23 pagesControl Engineering ME - 4012: Instructor Muhammad Rizwan SiddiquiTalha JalilNo ratings yet
- Week 3&4Document24 pagesWeek 3&4Yahya MateenNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Training CircularDocument20 pagesTraining CircularSasidhar KatariNo ratings yet
- Automatic Blind Rivet Making PlantDocument4 pagesAutomatic Blind Rivet Making PlantsmarjanNo ratings yet
- Motion To Reduce BailDocument3 pagesMotion To Reduce BailPatrice Noelle RamirezNo ratings yet
- MM30 743Document4 pagesMM30 743sigmasurat100% (1)
- Sis 2.0Document27 pagesSis 2.0mahmodNo ratings yet
- Tax Invoice/Bill of Supply/Cash Memo: (Original For Recipient)Document1 pageTax Invoice/Bill of Supply/Cash Memo: (Original For Recipient)RMNo ratings yet
- 3WA11 DatashDocument9 pages3WA11 DatashsuadNo ratings yet
- MD Rashedul IslamDocument3 pagesMD Rashedul IslamShahed AlamNo ratings yet
- Fundamentals of Early LiteracyDocument21 pagesFundamentals of Early LiteracyJay-Ar Ricafranca MitraNo ratings yet
- Lab 5-Nguyen The Huu-SE1841Document4 pagesLab 5-Nguyen The Huu-SE1841nguyenthehuu2003No ratings yet
- Defining SponsorshipDocument102 pagesDefining SponsorshipShaun Whatling100% (1)
- 3M Clean-Trace Hygiene Management Software User ManualDocument45 pages3M Clean-Trace Hygiene Management Software User ManualDaniel PaivaNo ratings yet
- RCC WallsDocument1 pageRCC Wallsaneesh0605No ratings yet
- Law On SalesDocument45 pagesLaw On SalesRaiel B. Buenviaje RN100% (1)
- S.S. Term 1 Project PPT On Chattisgarh Class 10-B Roll No.26 Name-Kushal SharmaDocument12 pagesS.S. Term 1 Project PPT On Chattisgarh Class 10-B Roll No.26 Name-Kushal SharmaKushal SharmaNo ratings yet
- Dihydrogen MonoxideDocument2 pagesDihydrogen MonoxideDaisuke Sakai100% (1)
- Micro Project Report (English)Document13 pagesMicro Project Report (English)Chaitali KumbharNo ratings yet
- WEG Regulador Automatico de Tension Wrga 02 10001284080 Manual EspanolDocument97 pagesWEG Regulador Automatico de Tension Wrga 02 10001284080 Manual EspanolEstalin Ochoa100% (1)
- Ls 5 Business FinanceDocument5 pagesLs 5 Business FinanceDimple McTurtleNo ratings yet
- An Overview of Modern CryptographyDocument7 pagesAn Overview of Modern CryptographyTI Journals PublishingNo ratings yet
- The Politics of Chinese Media: Consensus and ContestationDocument232 pagesThe Politics of Chinese Media: Consensus and Contestation왓SABNo ratings yet
- Intellectual Property Literature ReviewDocument17 pagesIntellectual Property Literature ReviewSashaNhara100% (1)
- (Download PDF) On The Trail of Capital Flight From Africa The Takers and The Enablers Leonce Ndikumana Editor Full Chapter PDFDocument69 pages(Download PDF) On The Trail of Capital Flight From Africa The Takers and The Enablers Leonce Ndikumana Editor Full Chapter PDFhadlerktat100% (6)
- BigData Avro-1Document30 pagesBigData Avro-1Sanjeeta ChauhanNo ratings yet
- Q3 Week2 Custom AnimationDocument28 pagesQ3 Week2 Custom AnimationEmee Grace RamonalNo ratings yet
- IEC StandardsDocument2 pagesIEC StandardsHammad Ali Zaman100% (1)
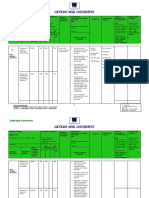
- Risk Assessment Hot WorkDocument5 pagesRisk Assessment Hot WorkRanjit DasNo ratings yet