
PRODUCT SIZING ACTUATOR Training
PRODUCT SIZING ACTUATOR Training
You might also like
- Preventing Dynamic Instability With Rotary Control ValvesDocument3 pagesPreventing Dynamic Instability With Rotary Control ValvesAbhishek ShrivastavaNo ratings yet
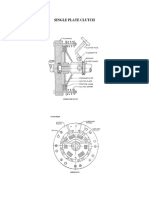
- Single Plate ClutchDocument4 pagesSingle Plate Clutchsaffrin0% (2)
- General Valve 4wayDocument12 pagesGeneral Valve 4wayMargaret DaughertyNo ratings yet
- G-Series Pneumatic and Hydraulic Actuators: The Compact, Lightweight and Reliable SolutionDocument12 pagesG-Series Pneumatic and Hydraulic Actuators: The Compact, Lightweight and Reliable SolutionRoo Fa100% (1)
- Service Instructions PDFDocument13 pagesService Instructions PDFBrett GottliebNo ratings yet
- Valtek ValdiskDocument8 pagesValtek ValdiskGustavo Garcia100% (1)
- Actuator Selection Guide For Flow-Tek Ball ValvesDocument16 pagesActuator Selection Guide For Flow-Tek Ball ValvesArt G. Enzi100% (1)
- RMT 23 Series Control ValveDocument37 pagesRMT 23 Series Control ValveNymphetamine AnhNo ratings yet
- Megastream Control Valves: General InstructionsDocument4 pagesMegastream Control Valves: General InstructionsCarlos Alberto Dum GomezNo ratings yet
- MasoneilanDocument20 pagesMasoneilanJohn MarshalNo ratings yet
- Ellingsen 1761 PDFDocument35 pagesEllingsen 1761 PDFsalamrefighNo ratings yet
- Product Bulletin Fisher Rotary Valve Selection Guide en 135280Document16 pagesProduct Bulletin Fisher Rotary Valve Selection Guide en 135280jairo moralesNo ratings yet
- Valdisk Manual PDFDocument12 pagesValdisk Manual PDFNag RajNo ratings yet
- Control Valve - Samson PDFDocument12 pagesControl Valve - Samson PDFsaurabh kumarNo ratings yet
- 02-A Kinetico Owners Manual - Commercial Plus Softener SeriesDocument32 pages02-A Kinetico Owners Manual - Commercial Plus Softener SeriesCastoriadisNo ratings yet
- Development of A Multi-Stage Choke Valve SizingDocument221 pagesDevelopment of A Multi-Stage Choke Valve SizingsekharsamyNo ratings yet
- Bettis CBA 300 Series Service ManualDocument15 pagesBettis CBA 300 Series Service ManualKenny BNo ratings yet
- Refining Industry Solutions: Experience, Knowledge, and Technology... in RefiningDocument44 pagesRefining Industry Solutions: Experience, Knowledge, and Technology... in RefiningMorteza SepehranNo ratings yet
- Automax Actuators & Accessories EnglishDocument18 pagesAutomax Actuators & Accessories EnglishJamesTorresPalmaNo ratings yet
- Control ValvesDocument26 pagesControl ValvesSandi Aslan100% (1)
- Gorter r200Document6 pagesGorter r200Manish SaraswatNo ratings yet
- HPY Series Pneumatic Actuator PDFDocument32 pagesHPY Series Pneumatic Actuator PDFAnnie De WildeNo ratings yet
- EFCO Valve Repair ProductsDocument20 pagesEFCO Valve Repair Productsjay_rajeshirkeNo ratings yet
- Twin SealDocument29 pagesTwin SealJefferson De Sousa Oliveira100% (1)
- Deluge ValveDocument8 pagesDeluge ValveMOHNISHKUMARJHANo ratings yet
- xg01 Koso Kent Introl PDFDocument22 pagesxg01 Koso Kent Introl PDFhaidinuNo ratings yet
- HP ChokesDocument24 pagesHP Chokesghoulin01No ratings yet
- Dow Control Valves DataDocument16 pagesDow Control Valves Dataerlangga cahyauutamaNo ratings yet
- Control Valve ActuatorsDocument31 pagesControl Valve ActuatorsMuhammad ImtiazNo ratings yet
- Quo 08861 P8W8J8 PDFDocument1 pageQuo 08861 P8W8J8 PDFMichael MurphyNo ratings yet
- Basic Type of ValvesDocument2 pagesBasic Type of ValvesElton Situmeang100% (3)
- Orifice Flanges and Orifice PlatesDocument3 pagesOrifice Flanges and Orifice PlatesJohn MuellerNo ratings yet
- High Integrity Pressure System HippsDocument16 pagesHigh Integrity Pressure System Hippspreetosh1No ratings yet
- Instrument Overview: For Yaman LNG On The Job TrainingDocument86 pagesInstrument Overview: For Yaman LNG On The Job TrainingQhismu AdjieNo ratings yet
- FlowTek Ball Valve DesignDocument0 pagesFlowTek Ball Valve DesignGohilakrishnan ThiagarajanNo ratings yet
- Technical Bulletine G Series ActuatorsDocument8 pagesTechnical Bulletine G Series Actuatorsarif_setyaw4nNo ratings yet
- Control Valves & AccessoriesDocument94 pagesControl Valves & AccessoriesFercho JoseNo ratings yet
- Swagelok Ball ValveDocument8 pagesSwagelok Ball ValveSyahirul AlimNo ratings yet
- 10 OXLER VW Scotch Yoke Actuator 2Document2 pages10 OXLER VW Scotch Yoke Actuator 2DachyiNo ratings yet
- Tescom Technical Training - Pressure Regulators Explained - Ver1.1Document19 pagesTescom Technical Training - Pressure Regulators Explained - Ver1.1Amod DeshpandeNo ratings yet
- IOM Actuator AutomaxSupernovaDocument4 pagesIOM Actuator AutomaxSupernovaNaser JahangiriNo ratings yet
- Technical Data Sheet Magnetic Flow Meter Material Selection Guide en 74360Document40 pagesTechnical Data Sheet Magnetic Flow Meter Material Selection Guide en 74360gustirizkiawanNo ratings yet
- P 003 Wellhead Control Panel 10KDocument2 pagesP 003 Wellhead Control Panel 10KDidik PramujiNo ratings yet
- Quarter Turn & Linear Steel Actuators: General CatalogueDocument48 pagesQuarter Turn & Linear Steel Actuators: General Catalogueabdelkader benabdallahNo ratings yet
- Ledeen Actuator General Catalogue - Entire Line - ENVIADO 20.07.17 PDFDocument24 pagesLedeen Actuator General Catalogue - Entire Line - ENVIADO 20.07.17 PDFDaniele GouveiaNo ratings yet
- Control ValveDocument43 pagesControl ValveAhmed Mohamed Khalil100% (1)
- MB Csu 46bbrss1dDocument18 pagesMB Csu 46bbrss1delver sanabriaNo ratings yet
- Instrumentation Positioner PresentationDocument43 pagesInstrumentation Positioner PresentationSangram Patnaik100% (2)
- Proportional Valve TroubleshootingDocument48 pagesProportional Valve Troubleshootingbrunosamaeian100% (1)
- Ufn3 Treinamento e ManutençãoDocument62 pagesUfn3 Treinamento e ManutençãoRodneiNo ratings yet
- CES-107 U Assembly Test 21000 SeriesDocument15 pagesCES-107 U Assembly Test 21000 SeriesAlfredo SantanaNo ratings yet
- Instrument Engineer's Handbook For DURCO Quarter-Turn Control ValvesDocument77 pagesInstrument Engineer's Handbook For DURCO Quarter-Turn Control ValvesVarsha ChawdaNo ratings yet
- Operation Manual: Hydraulic Slow-Closing Check Butterfly ValveDocument41 pagesOperation Manual: Hydraulic Slow-Closing Check Butterfly ValveAnton HidayatNo ratings yet
- Fisher l2 Liquid Level Controllers en 135074Document16 pagesFisher l2 Liquid Level Controllers en 135074GOKUL PRASADNo ratings yet
- Mokveld Brochure Angle Choke ValveDocument16 pagesMokveld Brochure Angle Choke ValvekglorstadNo ratings yet
- CBB Sizing and SelectionDocument2 pagesCBB Sizing and SelectionUhong LaiNo ratings yet
- Axial and Radial Flow TurbinesDocument138 pagesAxial and Radial Flow TurbinesPRAVEEN100% (1)
- Axial Flow TurbinesDocument145 pagesAxial Flow TurbinesRaj Narayan100% (1)
- How To Size Pneumatic ActuatorsDocument5 pagesHow To Size Pneumatic ActuatorsJose David De SousaNo ratings yet
- CBB Sizing and SelectionDocument2 pagesCBB Sizing and SelectionJandri JacobNo ratings yet
- Engine Management & Data Acquisition Systems: Formula SAE Seminar May 2004 DetroitDocument103 pagesEngine Management & Data Acquisition Systems: Formula SAE Seminar May 2004 DetroitAvinashRaiNo ratings yet
- Locking Devices and Limit SwitchesDocument2 pagesLocking Devices and Limit SwitchesNyoman RakaNo ratings yet
- Visio-Scematic Diagram 01Document1 pageVisio-Scematic Diagram 01Nyoman RakaNo ratings yet
- Valve Automation NEWDocument24 pagesValve Automation NEWNyoman RakaNo ratings yet
- HD-Series Pneumatic & Hydraulic Actuators For Heavy Duty ServiceDocument6 pagesHD-Series Pneumatic & Hydraulic Actuators For Heavy Duty ServiceNyoman RakaNo ratings yet
- Visio-Scematic SDV Kresna Dwi Karsa 01Document1 pageVisio-Scematic SDV Kresna Dwi Karsa 01Nyoman RakaNo ratings yet
- ASCO Numatics - Bypass Test PanelDocument4 pagesASCO Numatics - Bypass Test PanelNyoman RakaNo ratings yet
- Control Valve Seat Leakage Test ProcedureDocument20 pagesControl Valve Seat Leakage Test ProcedureNyoman RakaNo ratings yet
- 4-Api RP 520Document21 pages4-Api RP 520Nyoman RakaNo ratings yet
- PRV Repair: Common "Poor" Maintenance PracticesDocument32 pagesPRV Repair: Common "Poor" Maintenance PracticesNyoman RakaNo ratings yet
- 4-Api RP 520Document21 pages4-Api RP 520Nyoman RakaNo ratings yet
- Miscellaneous TopicsDocument6 pagesMiscellaneous TopicsNyoman RakaNo ratings yet
- 1 Introduction Pressure Relief ProductsDocument24 pages1 Introduction Pressure Relief ProductsNyoman RakaNo ratings yet
- Drawing Fitting and FlangeDocument8 pagesDrawing Fitting and FlangeNyoman RakaNo ratings yet
- Glenn A. Hunter - Global Product Manager, Reciprocating: PreviousDocument73 pagesGlenn A. Hunter - Global Product Manager, Reciprocating: PreviousNyoman RakaNo ratings yet
- Maintenance and RepairDocument4 pagesMaintenance and RepairNyoman RakaNo ratings yet
- Plug ValveDocument5 pagesPlug ValveNyoman RakaNo ratings yet
- Guidance On Control Valve SelectionDocument14 pagesGuidance On Control Valve SelectionNyoman RakaNo ratings yet
- 5 Pressure Relief ValvesDocument11 pages5 Pressure Relief ValvesNyoman RakaNo ratings yet
- 1 Introduction To ValvesDocument21 pages1 Introduction To ValvesNyoman Raka100% (1)
- Operators and ActuatorsDocument11 pagesOperators and ActuatorsNyoman RakaNo ratings yet
- 01control Valve IntroductionDocument12 pages01control Valve IntroductionNyoman RakaNo ratings yet
- Fluid Flow Through ValvesDocument6 pagesFluid Flow Through ValvesNyoman RakaNo ratings yet
- Diaphragm ValveDocument4 pagesDiaphragm ValveNyoman RakaNo ratings yet
- Butterfly ValveDocument5 pagesButterfly ValveNyoman RakaNo ratings yet
- Users Manual: Pneumatic Comparison Test PumpDocument20 pagesUsers Manual: Pneumatic Comparison Test PumpNyoman RakaNo ratings yet
- 01 Control Valve RatingDocument8 pages01 Control Valve RatingNyoman RakaNo ratings yet
- Valve Technology: - by Fabian C. GonzalezDocument106 pagesValve Technology: - by Fabian C. GonzalezNyoman RakaNo ratings yet
- 01 Control Valve PicturesDocument27 pages01 Control Valve PicturesNyoman RakaNo ratings yet
- Portable Pneumatic Calibrator SERIES 65-120: Technical InformationDocument4 pagesPortable Pneumatic Calibrator SERIES 65-120: Technical InformationNyoman RakaNo ratings yet
- Data Sheet Dowcorning 111Document2 pagesData Sheet Dowcorning 111Nyoman RakaNo ratings yet
- MEC 412 Experiment 1 - MechanismsDocument11 pagesMEC 412 Experiment 1 - MechanismsAnas OmarNo ratings yet
- PBP 201 - Partdt204 - Ix'23Document1 pagePBP 201 - Partdt204 - Ix'23Pram BudiNo ratings yet
- The Marking PlateDocument3 pagesThe Marking Plateঅর্ঘ্য রায়100% (1)
- Ia - Electrical Installation and Maintenance CGDocument31 pagesIa - Electrical Installation and Maintenance CGJoseph OmpadNo ratings yet
- Ball ValvesDocument14 pagesBall ValvesMalik DaniyalNo ratings yet
- Logbook Ctu 07 (Arif SB 2023) - 1Document240 pagesLogbook Ctu 07 (Arif SB 2023) - 1Arief Setia budiNo ratings yet
- TEST PAPER Pre-Mid DEF - TAC 4Document3 pagesTEST PAPER Pre-Mid DEF - TAC 4Nelson DumpacNo ratings yet
- Aumund Bucket Elevator: 47682B 47682C 47682D 47682E 47682FDocument7 pagesAumund Bucket Elevator: 47682B 47682C 47682D 47682E 47682FanilNo ratings yet
- Viking Softail Solo Bag Instrcution: PartsDocument3 pagesViking Softail Solo Bag Instrcution: PartsChu Chuito TachinNo ratings yet
- Pump, Troubleshooting: Service InformationDocument2 pagesPump, Troubleshooting: Service InformationNaing Min HtunNo ratings yet
- Registeration Number Name Rollnumber StatusDocument3 pagesRegisteration Number Name Rollnumber StatusManish SinhaNo ratings yet
- Saviesa Catalogue PDFDocument39 pagesSaviesa Catalogue PDFPranav MistryNo ratings yet
- Blade - May 2021Document88 pagesBlade - May 2021Krisztián SzilágyiNo ratings yet
- 7 3 Hydraulic Pump For Remixer Drum 56025117Document5 pages7 3 Hydraulic Pump For Remixer Drum 56025117eduamaNo ratings yet
- Advanced Tool SharpeningDocument10 pagesAdvanced Tool SharpeningjenrocoNo ratings yet
- Concentricity Checking FixtureDocument3 pagesConcentricity Checking FixtureDivyansh SaxenaNo ratings yet
- Matgroup 2Document10 pagesMatgroup 2Kiatchai IttivikulNo ratings yet
- Workshop Technology by Anu ShresthaDocument561 pagesWorkshop Technology by Anu ShresthaPrabhat Khewa Limbu100% (1)
- 10.5 CM leFH 18 (SF.) Auf Geschützwagen 39H (F) - Tank EncyclopediaDocument1 page10.5 CM leFH 18 (SF.) Auf Geschützwagen 39H (F) - Tank EncyclopediaDezso RezsoNo ratings yet
- 07 Rawlbolts Plugs Anchors PDFDocument1 page07 Rawlbolts Plugs Anchors PDFEnrique MurgiaNo ratings yet
- Woodworking Presentation 040518-1Document60 pagesWoodworking Presentation 040518-1Ssilva silvaNo ratings yet
- Module HE P 240 Series Installation Manual 050119Document52 pagesModule HE P 240 Series Installation Manual 050119CTHNo ratings yet
- Design of Jigs, Fixtures and Press Tools UNIT 1: Locating and Clamping PrinciplesDocument18 pagesDesign of Jigs, Fixtures and Press Tools UNIT 1: Locating and Clamping PrinciplesVarthini RajaNo ratings yet
- Chapter 2 Logical SensorDocument33 pagesChapter 2 Logical SensorMuhammad AniqNo ratings yet
- Konflikt47 Errata 040520-1Document13 pagesKonflikt47 Errata 040520-1Will BussingNo ratings yet
- Design Change of Cooling Water Pump ImpellerDocument2 pagesDesign Change of Cooling Water Pump ImpellerEsteban GiurovichNo ratings yet
- SNB Unit Main FeaturesDocument8 pagesSNB Unit Main FeaturesMas SusiloNo ratings yet
- BSA Lightning Air Rifle PDFDocument2 pagesBSA Lightning Air Rifle PDFErikNo ratings yet
- Name: - Grade and Section: - Date: - ScoreDocument3 pagesName: - Grade and Section: - Date: - ScoreChristy ParinasanNo ratings yet






















































































































Download as ppt, pdf, or txt
You might also like
- Preventing Dynamic Instability With Rotary Control ValvesDocument3 pagesPreventing Dynamic Instability With Rotary Control ValvesAbhishek ShrivastavaNo ratings yet
- Single Plate ClutchDocument4 pagesSingle Plate Clutchsaffrin0% (2)
- General Valve 4wayDocument12 pagesGeneral Valve 4wayMargaret DaughertyNo ratings yet
- G-Series Pneumatic and Hydraulic Actuators: The Compact, Lightweight and Reliable SolutionDocument12 pagesG-Series Pneumatic and Hydraulic Actuators: The Compact, Lightweight and Reliable SolutionRoo Fa100% (1)
- Service Instructions PDFDocument13 pagesService Instructions PDFBrett GottliebNo ratings yet
- Valtek ValdiskDocument8 pagesValtek ValdiskGustavo Garcia100% (1)
- Actuator Selection Guide For Flow-Tek Ball ValvesDocument16 pagesActuator Selection Guide For Flow-Tek Ball ValvesArt G. Enzi100% (1)
- RMT 23 Series Control ValveDocument37 pagesRMT 23 Series Control ValveNymphetamine AnhNo ratings yet
- Megastream Control Valves: General InstructionsDocument4 pagesMegastream Control Valves: General InstructionsCarlos Alberto Dum GomezNo ratings yet
- MasoneilanDocument20 pagesMasoneilanJohn MarshalNo ratings yet
- Ellingsen 1761 PDFDocument35 pagesEllingsen 1761 PDFsalamrefighNo ratings yet
- Product Bulletin Fisher Rotary Valve Selection Guide en 135280Document16 pagesProduct Bulletin Fisher Rotary Valve Selection Guide en 135280jairo moralesNo ratings yet
- Valdisk Manual PDFDocument12 pagesValdisk Manual PDFNag RajNo ratings yet
- Control Valve - Samson PDFDocument12 pagesControl Valve - Samson PDFsaurabh kumarNo ratings yet
- 02-A Kinetico Owners Manual - Commercial Plus Softener SeriesDocument32 pages02-A Kinetico Owners Manual - Commercial Plus Softener SeriesCastoriadisNo ratings yet
- Development of A Multi-Stage Choke Valve SizingDocument221 pagesDevelopment of A Multi-Stage Choke Valve SizingsekharsamyNo ratings yet
- Bettis CBA 300 Series Service ManualDocument15 pagesBettis CBA 300 Series Service ManualKenny BNo ratings yet
- Refining Industry Solutions: Experience, Knowledge, and Technology... in RefiningDocument44 pagesRefining Industry Solutions: Experience, Knowledge, and Technology... in RefiningMorteza SepehranNo ratings yet
- Automax Actuators & Accessories EnglishDocument18 pagesAutomax Actuators & Accessories EnglishJamesTorresPalmaNo ratings yet
- Control ValvesDocument26 pagesControl ValvesSandi Aslan100% (1)
- Gorter r200Document6 pagesGorter r200Manish SaraswatNo ratings yet
- HPY Series Pneumatic Actuator PDFDocument32 pagesHPY Series Pneumatic Actuator PDFAnnie De WildeNo ratings yet
- EFCO Valve Repair ProductsDocument20 pagesEFCO Valve Repair Productsjay_rajeshirkeNo ratings yet
- Twin SealDocument29 pagesTwin SealJefferson De Sousa Oliveira100% (1)
- Deluge ValveDocument8 pagesDeluge ValveMOHNISHKUMARJHANo ratings yet
- xg01 Koso Kent Introl PDFDocument22 pagesxg01 Koso Kent Introl PDFhaidinuNo ratings yet
- HP ChokesDocument24 pagesHP Chokesghoulin01No ratings yet
- Dow Control Valves DataDocument16 pagesDow Control Valves Dataerlangga cahyauutamaNo ratings yet
- Control Valve ActuatorsDocument31 pagesControl Valve ActuatorsMuhammad ImtiazNo ratings yet
- Quo 08861 P8W8J8 PDFDocument1 pageQuo 08861 P8W8J8 PDFMichael MurphyNo ratings yet
- Basic Type of ValvesDocument2 pagesBasic Type of ValvesElton Situmeang100% (3)
- Orifice Flanges and Orifice PlatesDocument3 pagesOrifice Flanges and Orifice PlatesJohn MuellerNo ratings yet
- High Integrity Pressure System HippsDocument16 pagesHigh Integrity Pressure System Hippspreetosh1No ratings yet
- Instrument Overview: For Yaman LNG On The Job TrainingDocument86 pagesInstrument Overview: For Yaman LNG On The Job TrainingQhismu AdjieNo ratings yet
- FlowTek Ball Valve DesignDocument0 pagesFlowTek Ball Valve DesignGohilakrishnan ThiagarajanNo ratings yet
- Technical Bulletine G Series ActuatorsDocument8 pagesTechnical Bulletine G Series Actuatorsarif_setyaw4nNo ratings yet
- Control Valves & AccessoriesDocument94 pagesControl Valves & AccessoriesFercho JoseNo ratings yet
- Swagelok Ball ValveDocument8 pagesSwagelok Ball ValveSyahirul AlimNo ratings yet
- 10 OXLER VW Scotch Yoke Actuator 2Document2 pages10 OXLER VW Scotch Yoke Actuator 2DachyiNo ratings yet
- Tescom Technical Training - Pressure Regulators Explained - Ver1.1Document19 pagesTescom Technical Training - Pressure Regulators Explained - Ver1.1Amod DeshpandeNo ratings yet
- IOM Actuator AutomaxSupernovaDocument4 pagesIOM Actuator AutomaxSupernovaNaser JahangiriNo ratings yet
- Technical Data Sheet Magnetic Flow Meter Material Selection Guide en 74360Document40 pagesTechnical Data Sheet Magnetic Flow Meter Material Selection Guide en 74360gustirizkiawanNo ratings yet
- P 003 Wellhead Control Panel 10KDocument2 pagesP 003 Wellhead Control Panel 10KDidik PramujiNo ratings yet
- Quarter Turn & Linear Steel Actuators: General CatalogueDocument48 pagesQuarter Turn & Linear Steel Actuators: General Catalogueabdelkader benabdallahNo ratings yet
- Ledeen Actuator General Catalogue - Entire Line - ENVIADO 20.07.17 PDFDocument24 pagesLedeen Actuator General Catalogue - Entire Line - ENVIADO 20.07.17 PDFDaniele GouveiaNo ratings yet
- Control ValveDocument43 pagesControl ValveAhmed Mohamed Khalil100% (1)
- MB Csu 46bbrss1dDocument18 pagesMB Csu 46bbrss1delver sanabriaNo ratings yet
- Instrumentation Positioner PresentationDocument43 pagesInstrumentation Positioner PresentationSangram Patnaik100% (2)
- Proportional Valve TroubleshootingDocument48 pagesProportional Valve Troubleshootingbrunosamaeian100% (1)
- Ufn3 Treinamento e ManutençãoDocument62 pagesUfn3 Treinamento e ManutençãoRodneiNo ratings yet
- CES-107 U Assembly Test 21000 SeriesDocument15 pagesCES-107 U Assembly Test 21000 SeriesAlfredo SantanaNo ratings yet
- Instrument Engineer's Handbook For DURCO Quarter-Turn Control ValvesDocument77 pagesInstrument Engineer's Handbook For DURCO Quarter-Turn Control ValvesVarsha ChawdaNo ratings yet
- Operation Manual: Hydraulic Slow-Closing Check Butterfly ValveDocument41 pagesOperation Manual: Hydraulic Slow-Closing Check Butterfly ValveAnton HidayatNo ratings yet
- Fisher l2 Liquid Level Controllers en 135074Document16 pagesFisher l2 Liquid Level Controllers en 135074GOKUL PRASADNo ratings yet
- Mokveld Brochure Angle Choke ValveDocument16 pagesMokveld Brochure Angle Choke ValvekglorstadNo ratings yet
- CBB Sizing and SelectionDocument2 pagesCBB Sizing and SelectionUhong LaiNo ratings yet
- Axial and Radial Flow TurbinesDocument138 pagesAxial and Radial Flow TurbinesPRAVEEN100% (1)
- Axial Flow TurbinesDocument145 pagesAxial Flow TurbinesRaj Narayan100% (1)
- How To Size Pneumatic ActuatorsDocument5 pagesHow To Size Pneumatic ActuatorsJose David De SousaNo ratings yet
- CBB Sizing and SelectionDocument2 pagesCBB Sizing and SelectionJandri JacobNo ratings yet
- Engine Management & Data Acquisition Systems: Formula SAE Seminar May 2004 DetroitDocument103 pagesEngine Management & Data Acquisition Systems: Formula SAE Seminar May 2004 DetroitAvinashRaiNo ratings yet
- Locking Devices and Limit SwitchesDocument2 pagesLocking Devices and Limit SwitchesNyoman RakaNo ratings yet
- Visio-Scematic Diagram 01Document1 pageVisio-Scematic Diagram 01Nyoman RakaNo ratings yet
- Valve Automation NEWDocument24 pagesValve Automation NEWNyoman RakaNo ratings yet
- HD-Series Pneumatic & Hydraulic Actuators For Heavy Duty ServiceDocument6 pagesHD-Series Pneumatic & Hydraulic Actuators For Heavy Duty ServiceNyoman RakaNo ratings yet
- Visio-Scematic SDV Kresna Dwi Karsa 01Document1 pageVisio-Scematic SDV Kresna Dwi Karsa 01Nyoman RakaNo ratings yet
- ASCO Numatics - Bypass Test PanelDocument4 pagesASCO Numatics - Bypass Test PanelNyoman RakaNo ratings yet
- Control Valve Seat Leakage Test ProcedureDocument20 pagesControl Valve Seat Leakage Test ProcedureNyoman RakaNo ratings yet
- 4-Api RP 520Document21 pages4-Api RP 520Nyoman RakaNo ratings yet
- PRV Repair: Common "Poor" Maintenance PracticesDocument32 pagesPRV Repair: Common "Poor" Maintenance PracticesNyoman RakaNo ratings yet
- 4-Api RP 520Document21 pages4-Api RP 520Nyoman RakaNo ratings yet
- Miscellaneous TopicsDocument6 pagesMiscellaneous TopicsNyoman RakaNo ratings yet
- 1 Introduction Pressure Relief ProductsDocument24 pages1 Introduction Pressure Relief ProductsNyoman RakaNo ratings yet
- Drawing Fitting and FlangeDocument8 pagesDrawing Fitting and FlangeNyoman RakaNo ratings yet
- Glenn A. Hunter - Global Product Manager, Reciprocating: PreviousDocument73 pagesGlenn A. Hunter - Global Product Manager, Reciprocating: PreviousNyoman RakaNo ratings yet
- Maintenance and RepairDocument4 pagesMaintenance and RepairNyoman RakaNo ratings yet
- Plug ValveDocument5 pagesPlug ValveNyoman RakaNo ratings yet
- Guidance On Control Valve SelectionDocument14 pagesGuidance On Control Valve SelectionNyoman RakaNo ratings yet
- 5 Pressure Relief ValvesDocument11 pages5 Pressure Relief ValvesNyoman RakaNo ratings yet
- 1 Introduction To ValvesDocument21 pages1 Introduction To ValvesNyoman Raka100% (1)
- Operators and ActuatorsDocument11 pagesOperators and ActuatorsNyoman RakaNo ratings yet
- 01control Valve IntroductionDocument12 pages01control Valve IntroductionNyoman RakaNo ratings yet
- Fluid Flow Through ValvesDocument6 pagesFluid Flow Through ValvesNyoman RakaNo ratings yet
- Diaphragm ValveDocument4 pagesDiaphragm ValveNyoman RakaNo ratings yet
- Butterfly ValveDocument5 pagesButterfly ValveNyoman RakaNo ratings yet
- Users Manual: Pneumatic Comparison Test PumpDocument20 pagesUsers Manual: Pneumatic Comparison Test PumpNyoman RakaNo ratings yet
- 01 Control Valve RatingDocument8 pages01 Control Valve RatingNyoman RakaNo ratings yet
- Valve Technology: - by Fabian C. GonzalezDocument106 pagesValve Technology: - by Fabian C. GonzalezNyoman RakaNo ratings yet
- 01 Control Valve PicturesDocument27 pages01 Control Valve PicturesNyoman RakaNo ratings yet
- Portable Pneumatic Calibrator SERIES 65-120: Technical InformationDocument4 pagesPortable Pneumatic Calibrator SERIES 65-120: Technical InformationNyoman RakaNo ratings yet
- Data Sheet Dowcorning 111Document2 pagesData Sheet Dowcorning 111Nyoman RakaNo ratings yet
- MEC 412 Experiment 1 - MechanismsDocument11 pagesMEC 412 Experiment 1 - MechanismsAnas OmarNo ratings yet
- PBP 201 - Partdt204 - Ix'23Document1 pagePBP 201 - Partdt204 - Ix'23Pram BudiNo ratings yet
- The Marking PlateDocument3 pagesThe Marking Plateঅর্ঘ্য রায়100% (1)
- Ia - Electrical Installation and Maintenance CGDocument31 pagesIa - Electrical Installation and Maintenance CGJoseph OmpadNo ratings yet
- Ball ValvesDocument14 pagesBall ValvesMalik DaniyalNo ratings yet
- Logbook Ctu 07 (Arif SB 2023) - 1Document240 pagesLogbook Ctu 07 (Arif SB 2023) - 1Arief Setia budiNo ratings yet
- TEST PAPER Pre-Mid DEF - TAC 4Document3 pagesTEST PAPER Pre-Mid DEF - TAC 4Nelson DumpacNo ratings yet
- Aumund Bucket Elevator: 47682B 47682C 47682D 47682E 47682FDocument7 pagesAumund Bucket Elevator: 47682B 47682C 47682D 47682E 47682FanilNo ratings yet
- Viking Softail Solo Bag Instrcution: PartsDocument3 pagesViking Softail Solo Bag Instrcution: PartsChu Chuito TachinNo ratings yet
- Pump, Troubleshooting: Service InformationDocument2 pagesPump, Troubleshooting: Service InformationNaing Min HtunNo ratings yet
- Registeration Number Name Rollnumber StatusDocument3 pagesRegisteration Number Name Rollnumber StatusManish SinhaNo ratings yet
- Saviesa Catalogue PDFDocument39 pagesSaviesa Catalogue PDFPranav MistryNo ratings yet
- Blade - May 2021Document88 pagesBlade - May 2021Krisztián SzilágyiNo ratings yet
- 7 3 Hydraulic Pump For Remixer Drum 56025117Document5 pages7 3 Hydraulic Pump For Remixer Drum 56025117eduamaNo ratings yet
- Advanced Tool SharpeningDocument10 pagesAdvanced Tool SharpeningjenrocoNo ratings yet
- Concentricity Checking FixtureDocument3 pagesConcentricity Checking FixtureDivyansh SaxenaNo ratings yet
- Matgroup 2Document10 pagesMatgroup 2Kiatchai IttivikulNo ratings yet
- Workshop Technology by Anu ShresthaDocument561 pagesWorkshop Technology by Anu ShresthaPrabhat Khewa Limbu100% (1)
- 10.5 CM leFH 18 (SF.) Auf Geschützwagen 39H (F) - Tank EncyclopediaDocument1 page10.5 CM leFH 18 (SF.) Auf Geschützwagen 39H (F) - Tank EncyclopediaDezso RezsoNo ratings yet
- 07 Rawlbolts Plugs Anchors PDFDocument1 page07 Rawlbolts Plugs Anchors PDFEnrique MurgiaNo ratings yet
- Woodworking Presentation 040518-1Document60 pagesWoodworking Presentation 040518-1Ssilva silvaNo ratings yet
- Module HE P 240 Series Installation Manual 050119Document52 pagesModule HE P 240 Series Installation Manual 050119CTHNo ratings yet
- Design of Jigs, Fixtures and Press Tools UNIT 1: Locating and Clamping PrinciplesDocument18 pagesDesign of Jigs, Fixtures and Press Tools UNIT 1: Locating and Clamping PrinciplesVarthini RajaNo ratings yet
- Chapter 2 Logical SensorDocument33 pagesChapter 2 Logical SensorMuhammad AniqNo ratings yet
- Konflikt47 Errata 040520-1Document13 pagesKonflikt47 Errata 040520-1Will BussingNo ratings yet
- Design Change of Cooling Water Pump ImpellerDocument2 pagesDesign Change of Cooling Water Pump ImpellerEsteban GiurovichNo ratings yet
- SNB Unit Main FeaturesDocument8 pagesSNB Unit Main FeaturesMas SusiloNo ratings yet
- BSA Lightning Air Rifle PDFDocument2 pagesBSA Lightning Air Rifle PDFErikNo ratings yet
- Name: - Grade and Section: - Date: - ScoreDocument3 pagesName: - Grade and Section: - Date: - ScoreChristy ParinasanNo ratings yet