Download as pptx, pdf, or txt
You might also like
- Lec 1 - Number Systems and Digital LogicDocument38 pagesLec 1 - Number Systems and Digital LogicSAVILASH A/L RAVINDRANNo ratings yet
- Banking SystemDocument51 pagesBanking Systemisce5b100% (2)
- Great Expectations Vs Apache Griffin v1.2Document2 pagesGreat Expectations Vs Apache Griffin v1.2kashif100% (1)
- ARM - Advanced RISC Machines: RISC-Reduce Instruction Set ComputersDocument60 pagesARM - Advanced RISC Machines: RISC-Reduce Instruction Set ComputersPraveen EdulaNo ratings yet
- 02 ArmDocument53 pages02 ArmBasudha PalNo ratings yet
- Arm CortexDocument131 pagesArm CortexPranav SinhaNo ratings yet
- Advanced Risc MachinersDocument21 pagesAdvanced Risc MachinersAANCHALNo ratings yet
- Unit 5 DSP SystemDocument30 pagesUnit 5 DSP SystemSiddhasen Patil100% (2)
- Unit-Viii: Arm 32-Bit Mcus: Architecture, Programming, & Development ToolsDocument16 pagesUnit-Viii: Arm 32-Bit Mcus: Architecture, Programming, & Development ToolsvirikrisNo ratings yet
- Ece4750 T01 Proc ScycleDocument24 pagesEce4750 T01 Proc ScyclekartimidNo ratings yet
- CAO - Processor Organization and Control UnitDocument120 pagesCAO - Processor Organization and Control UnitSandeep PillaiNo ratings yet
- 01 Risc MF PDFDocument123 pages01 Risc MF PDFmohmmad omarNo ratings yet
- Acorn RISC MachineDocument6 pagesAcorn RISC Machinesolomon girmaNo ratings yet
- 1062 PDFDocument84 pages1062 PDFPrachi OberaiNo ratings yet
- Module - 5 - ARMDocument45 pagesModule - 5 - ARMatharv atreNo ratings yet
- ARM Processors (Advanced RISC Machines) : G N V RatnakishorDocument26 pagesARM Processors (Advanced RISC Machines) : G N V RatnakishorbhavanimaddulaNo ratings yet
- Module3 ARMDocument96 pagesModule3 ARMshivasstvmNo ratings yet
- Instruction Set Principles and ExamplesDocument77 pagesInstruction Set Principles and Examplesdayat_ridersNo ratings yet
- Digital Signal Processor 3Document25 pagesDigital Signal Processor 3Vijayaraghavan VNo ratings yet
- ARM Cortex M4 ArchitectureDocument44 pagesARM Cortex M4 ArchitectureTrần Võ Khôi Nguyên100% (1)
- Arm Intro l01Document47 pagesArm Intro l01Tanishq GuptaNo ratings yet
- IA 64 Architecture ReviewDocument48 pagesIA 64 Architecture ReviewBangari NaiduNo ratings yet
- Lecture 1: Introduction To ARM Based Embedded SystemsDocument24 pagesLecture 1: Introduction To ARM Based Embedded SystemsSaurabh HedaNo ratings yet
- EEM336 Week02 Addr ModesDocument96 pagesEEM336 Week02 Addr ModesMustafa TuraçNo ratings yet
- 03 - Instruction Set Architecture DesignDocument38 pages03 - Instruction Set Architecture DesignOscar Carballal DíazNo ratings yet
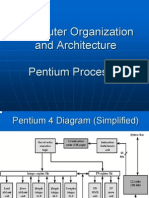
- Pentium 4 StructureDocument38 pagesPentium 4 Structureapi-3801329100% (6)
- ARM ProcessorDocument46 pagesARM Processoryixexi7070No ratings yet
- CSE 259 Lecture4Document14 pagesCSE 259 Lecture4robin haqueNo ratings yet
- Architecture of ARM Processor Family: Seminar On Architectures and Design MethodsDocument27 pagesArchitecture of ARM Processor Family: Seminar On Architectures and Design MethodsSree Harsha VemulapalliNo ratings yet
- Week 10 PDFDocument83 pagesWeek 10 PDFPoison RemarkNo ratings yet
- ESD 03 ARM ArchitectureDocument37 pagesESD 03 ARM ArchitectureAkshay Gattu100% (1)
- MicroprocessorHVT2019 Lec03 ARMbasedMCUDocument38 pagesMicroprocessorHVT2019 Lec03 ARMbasedMCUHuỳnh Võ Thiện TuấnNo ratings yet
- Arm Cortex InstructionsDocument14 pagesArm Cortex InstructionsHamsini ShreenivasNo ratings yet
- ARM ProcessorDocument24 pagesARM ProcessorShreya AnushreeNo ratings yet
- ARM Introduction-1Document26 pagesARM Introduction-1040-NishanthNo ratings yet
- Microprocessor UNIT - IVDocument87 pagesMicroprocessor UNIT - IVMani GandanNo ratings yet
- Processing UnitDocument25 pagesProcessing UnitYash DongareNo ratings yet
- Introduction to ARMDocument24 pagesIntroduction to ARMSasi BhushanNo ratings yet
- Control UnitDocument47 pagesControl UnitZul HaireyNo ratings yet
- Embedded Lecture 4 ARMDocument47 pagesEmbedded Lecture 4 ARMmsmukeshsinghmsNo ratings yet
- 5.1. Unit V - DSP ProcessorDocument83 pages5.1. Unit V - DSP ProcessorJayaram ThamizhmaniNo ratings yet
- Cisc vs. RiscDocument53 pagesCisc vs. RiscnikitaNo ratings yet
- Qustions-Solutions by JamalDocument9 pagesQustions-Solutions by JamalJLM SSNo ratings yet
- ISA - CISC VS RISC - Intro To MIPSDocument59 pagesISA - CISC VS RISC - Intro To MIPSAffan GhazaliNo ratings yet
- The Acorn RISC Machine (ARM)Document12 pagesThe Acorn RISC Machine (ARM)Vikas SinghNo ratings yet
- Unit 2 CaoDocument8 pagesUnit 2 CaoZamal AhmedNo ratings yet
- Aesd QP SolDocument26 pagesAesd QP Sollaxmi shindeNo ratings yet
- The 80x86 Microprocessor: Dara RahmatiDocument31 pagesThe 80x86 Microprocessor: Dara Rahmatimohammadreza aminiNo ratings yet
- Complex Instruction Set Computer (CISC)Document28 pagesComplex Instruction Set Computer (CISC)NS Engg&Tech EEE DEPTNo ratings yet
- Cortex M3Document34 pagesCortex M3Sai KallemNo ratings yet
- Lecture 05 ARM ProcessorsDocument65 pagesLecture 05 ARM ProcessorsNguyễn Tấn ĐịnhNo ratings yet
- 4 Intel 286 To Pentium ArchitectureDocument25 pages4 Intel 286 To Pentium ArchitectureAli AhmadNo ratings yet
- Advanced Processors: Overview of DSP Unit-5 Unit-6Document58 pagesAdvanced Processors: Overview of DSP Unit-5 Unit-6isha rajNo ratings yet
- ARM Cortex M3: Overview & Programmer's Model: ECE 331, Spring 2013Document10 pagesARM Cortex M3: Overview & Programmer's Model: ECE 331, Spring 2013rhamerlinaNo ratings yet
- Introduction To ARM Cortex-M ProcessorDocument19 pagesIntroduction To ARM Cortex-M ProcessorJay PatelNo ratings yet
- Module 3 CoaDocument17 pagesModule 3 CoaGourab DashNo ratings yet
- Chapter 2 Lecture 6Document30 pagesChapter 2 Lecture 6Gebrie BeleteNo ratings yet
- ARM Instruction Sets and Program: Jin-Fu Li Department of Electrical Engineering National Central UniversityDocument116 pagesARM Instruction Sets and Program: Jin-Fu Li Department of Electrical Engineering National Central UniversityRANJITHANo ratings yet
- Introduction To Processor Design & The ARM ArchitectureDocument65 pagesIntroduction To Processor Design & The ARM Architectureveer_frnd89100% (1)
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationFrom EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
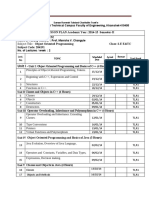
- Tutorial Plan CS - Riv 0Document1 pageTutorial Plan CS - Riv 0supriyaNo ratings yet
- SRTTC: Suman Ramesh Tulsiani Charitable Trust'sDocument2 pagesSRTTC: Suman Ramesh Tulsiani Charitable Trust'ssupriyaNo ratings yet
- Embedded Processor: Unit IIDocument50 pagesEmbedded Processor: Unit IIsupriyaNo ratings yet
- OOP's Lesson PlanDocument2 pagesOOP's Lesson PlansupriyaNo ratings yet
- Tutorial Plan Control SystemDocument2 pagesTutorial Plan Control SystemsupriyaNo ratings yet
- Beginners Guide To The Ubuntu TerminalDocument2 pagesBeginners Guide To The Ubuntu TerminalsupriyaNo ratings yet
- G Wº$ JQ - Nyd© Narúmm Narúmm ( Wi A (VG Mì Àízg M MJ - 1Document7 pagesG Wº$ JQ - Nyd© Narúmm Narúmm ( Wi A (VG Mì Àízg M MJ - 1supriyaNo ratings yet
- Linker LoaderDocument20 pagesLinker LoadersupriyaNo ratings yet
- Lpc11U35 Quickstart Board User'S Guide: Get Up-And-Running Quickly and Start Developing Your Applications On Day 1!Document20 pagesLpc11U35 Quickstart Board User'S Guide: Get Up-And-Running Quickly and Start Developing Your Applications On Day 1!Ag Cristian100% (1)
- Nama Database Bidan Kab - Landak (Ranting & PC) - 1-1-1-2-3Document162 pagesNama Database Bidan Kab - Landak (Ranting & PC) - 1-1-1-2-3Hana PontohNo ratings yet
- Gaurang - Software EngineerDocument1 pageGaurang - Software Engineernirmal.chaudhariNo ratings yet
- Cse 306Document2 pagesCse 306Tulasi ramNo ratings yet
- Unit2 NotesDocument4 pagesUnit2 NotesJeya PriyaNo ratings yet
- D 500BC-BOS: Bagging Scale ControllerDocument49 pagesD 500BC-BOS: Bagging Scale ControllerDan BalNo ratings yet
- APM PSRAM QSPI APS6404L SQRH v3 6 PKG-1954817Document26 pagesAPM PSRAM QSPI APS6404L SQRH v3 6 PKG-1954817ManunoghiNo ratings yet
- (D) Manual Neo Connect Plus PDFDocument26 pages(D) Manual Neo Connect Plus PDFGuerrero NeryNo ratings yet
- Operating System Lab Manual 19 20Document97 pagesOperating System Lab Manual 19 20A-1 Abhishek NiwalkarNo ratings yet
- Fundamentals of Database Systems: (Parallel and Distributed Databases)Document46 pagesFundamentals of Database Systems: (Parallel and Distributed Databases)thecoolguy96No ratings yet
- H310CM-HDV multiQIGDocument64 pagesH310CM-HDV multiQIGAnto RolNo ratings yet
- M6Vlr: Home Products Support & Service Where To Buy Resellers About BiostarDocument1 pageM6Vlr: Home Products Support & Service Where To Buy Resellers About BiostarGabriel OrlandoNo ratings yet
- 2 - Installing JDKDocument11 pages2 - Installing JDKTanaka MajNo ratings yet
- InfoQ - Java8 PDFDocument46 pagesInfoQ - Java8 PDFpbecicNo ratings yet
- 7 3commandspart2Document163 pages7 3commandspart2Syed SafiullaNo ratings yet
- AISC Search DLLDocument550 pagesAISC Search DLLkp21No ratings yet
- MANAOG Assignment 1Document4 pagesMANAOG Assignment 1IDate DanielNo ratings yet
- Pzpi22mqzezwuhwfmfjp 30nov PDF FaqDocument5 pagesPzpi22mqzezwuhwfmfjp 30nov PDF FaqLaw Cheng SanNo ratings yet
- Parafem f90 CodingDocument11 pagesParafem f90 Codingskc3128No ratings yet
- ICT I (Meterial)Document103 pagesICT I (Meterial)Udai SaikiranNo ratings yet
- NetEco Commissioning Guide (V200R003C01 - 01) (PDF) - enDocument116 pagesNetEco Commissioning Guide (V200R003C01 - 01) (PDF) - enabdo elmozogyNo ratings yet
- Phycore-Am335x Manual PDFDocument121 pagesPhycore-Am335x Manual PDFGustavo André PiangersNo ratings yet
- UE19CS352 - CC - HLP - Lecture 5Document15 pagesUE19CS352 - CC - HLP - Lecture 5Manogna GvNo ratings yet
- This Form Is For Use by Customers and Prospects To Request New Device Support in NnmiDocument9 pagesThis Form Is For Use by Customers and Prospects To Request New Device Support in NnmiChandan KumarNo ratings yet
- Manual de Utilizare DVR HDCVI Dahua WiZSense XVR5116HS-I2Document380 pagesManual de Utilizare DVR HDCVI Dahua WiZSense XVR5116HS-I2tibisortNo ratings yet
- The Architecture of The Domino Web ServerDocument5 pagesThe Architecture of The Domino Web ServerRahul SinghNo ratings yet
- C# BookDocument352 pagesC# Bookveena_matam785No ratings yet