Download as pptx, pdf, or txt
You might also like
- Same Virtus: Alarm ListDocument23 pagesSame Virtus: Alarm ListLacatusu Mircea100% (1)
- PyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1From EverandPyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1No ratings yet
- Assignment On BCG Matrix of Coca-ColaDocument14 pagesAssignment On BCG Matrix of Coca-ColaChamodya ThathsaraniNo ratings yet
- An Introduction To GNSSDocument99 pagesAn Introduction To GNSSjustine john acabal100% (1)
- Wound Bed Score and Its Correlation With Healing of Chronic WoundsDocument8 pagesWound Bed Score and Its Correlation With Healing of Chronic WoundsErick VásquezNo ratings yet
- The Silent Duchess, La Lunga Vita Di Marianna Ucria Chapters 1-9 Translated Into English With NotesDocument31 pagesThe Silent Duchess, La Lunga Vita Di Marianna Ucria Chapters 1-9 Translated Into English With NotesMatthew DonnelyNo ratings yet
- Errors and Biases in GPS: Maneeb Masood 15152010Document31 pagesErrors and Biases in GPS: Maneeb Masood 15152010Varun AkuthotaNo ratings yet
- GPS ErrorsDocument25 pagesGPS Errorsbchaitanya55No ratings yet
- GPS PresentationDocument33 pagesGPS PresentationSamir DasNo ratings yet
- Please Explain How GPS System Work. Explainin Term of TrilaterationDocument6 pagesPlease Explain How GPS System Work. Explainin Term of TrilaterationMohammad Fajri Raazaq RamadhanNo ratings yet
- DGPSDocument31 pagesDGPSWebster Vaz100% (3)
- ResumenDocument26 pagesResumendario albaNo ratings yet
- Notes On Satellite Navigation System-1Document11 pagesNotes On Satellite Navigation System-1Md Monir HossainNo ratings yet
- Global Positioning System (GPS)Document51 pagesGlobal Positioning System (GPS)17ECER72 DEVI PRASANNANo ratings yet
- Presentation ON Global Positioning System: Guided ByDocument21 pagesPresentation ON Global Positioning System: Guided ByJayesh JainNo ratings yet
- GPS SystemDocument11 pagesGPS SystemAHMED SOHELNo ratings yet
- Global Positioning SystemDocument6 pagesGlobal Positioning SystemAshutosh SharmaNo ratings yet
- CVL111 LM2 5Document20 pagesCVL111 LM2 5GoggiNo ratings yet
- CHAPTER-5 Introduction To GPS SurveyingDocument40 pagesCHAPTER-5 Introduction To GPS Surveyingaduyekirkosu1scribdNo ratings yet
- Navaids - RafsanDocument66 pagesNavaids - Rafsanparvezscribd2829No ratings yet
- GPS SurveyingDocument5 pagesGPS SurveyingLords BotzNo ratings yet
- The Global Positioning System: Bart Krol / Jeroen VerplankeDocument25 pagesThe Global Positioning System: Bart Krol / Jeroen VerplankegigarivaNo ratings yet
- Global Positioning System: Presented By: CGDocument21 pagesGlobal Positioning System: Presented By: CGskyrunmanNo ratings yet
- How GPS Works: Satellite Ranging or Pseudo-RangesDocument10 pagesHow GPS Works: Satellite Ranging or Pseudo-RangesPedro61No ratings yet
- International Institute of Management Engineering and TechnologyDocument26 pagesInternational Institute of Management Engineering and TechnologyTarun AgrawalNo ratings yet
- GPS 1Document25 pagesGPS 1sebastion jensonNo ratings yet
- Outline: Combining GPS & Cellular Network Measurements For PositioningDocument9 pagesOutline: Combining GPS & Cellular Network Measurements For PositioningMuhammad Niyas N SNo ratings yet
- Part I Working of GPS/DGPS Part II Programming of GPSDocument28 pagesPart I Working of GPS/DGPS Part II Programming of GPSSnehashish PatnaikNo ratings yet
- Surveying Course - IntroductionDocument14 pagesSurveying Course - IntroductionJamal SalehNo ratings yet
- 1.1 What Is GPS?: A. Space SegmentDocument11 pages1.1 What Is GPS?: A. Space SegmentReiger RoyalNo ratings yet
- GPS Error SourcesDocument13 pagesGPS Error SourcesGustavo AdolfoNo ratings yet
- How Does GPS WorkDocument4 pagesHow Does GPS WorkKaveesh SNo ratings yet
- Lecture 6Document26 pagesLecture 6abdicasis rashidNo ratings yet
- GIS Feb05 - GPS - Principles - 2004Document24 pagesGIS Feb05 - GPS - Principles - 2004Kasu_777No ratings yet
- Duhok Polytechnic University: Global Position System (GPS)Document7 pagesDuhok Polytechnic University: Global Position System (GPS)Xogr BargarayNo ratings yet
- Gps Data Logger Ew 11 09Document7 pagesGps Data Logger Ew 11 09henrydav_oNo ratings yet
- Gps Error Sources PDFDocument4 pagesGps Error Sources PDFPhillip0% (1)
- Gps Errors (P)Document11 pagesGps Errors (P)indika2222No ratings yet
- Arid Agriculture University, Rawalpindi: RSG 408 Navigation System 12 24-06-2020 BS 4th ADocument20 pagesArid Agriculture University, Rawalpindi: RSG 408 Navigation System 12 24-06-2020 BS 4th AAshh IshhNo ratings yet
- GPSDocument23 pagesGPSHrithik GuptaNo ratings yet
- Assignment Geodesy 1Document11 pagesAssignment Geodesy 1budak_gisNo ratings yet
- GPS AssignmentDocument8 pagesGPS AssignmentChristine M M Mariwo100% (1)
- ECB 2243-06-GPS-NezaDocument39 pagesECB 2243-06-GPS-NezalathavikneswariNo ratings yet
- Differential GPSDocument2 pagesDifferential GPSAimanNo ratings yet
- Differential GPS (DGPS)Document72 pagesDifferential GPS (DGPS)Clarence PieterszNo ratings yet
- The Global Positioning System: I. Introduction - What Is GPSDocument9 pagesThe Global Positioning System: I. Introduction - What Is GPSBruno LopesNo ratings yet
- What Is GPS?Document40 pagesWhat Is GPS?vigneshNo ratings yet
- Celestial Navigation in The Computer AgeDocument5 pagesCelestial Navigation in The Computer AgeMatics Vistar100% (1)
- GPS 1Document4 pagesGPS 1Aman AroraNo ratings yet
- Water Quality: Precision Agriculture: Global Positioning System (GPS)Document6 pagesWater Quality: Precision Agriculture: Global Positioning System (GPS)smbachbgweNo ratings yet
- Global Positioning System (GPS) : A Operators Guide To Use GPS Effectively As A Survey ToolDocument25 pagesGlobal Positioning System (GPS) : A Operators Guide To Use GPS Effectively As A Survey ToolTheyen NaidooNo ratings yet
- Concept of GpsDocument1 pageConcept of GpsYashpal VaghelaNo ratings yet
- Global Positioning System (GPS) AIM: To Determine The Area Using GPS APPARATUS: GPS Reciever, Batteries THEORY: The Global Positioning System (GPS) Is A Satellite-Based Navigation andDocument3 pagesGlobal Positioning System (GPS) AIM: To Determine The Area Using GPS APPARATUS: GPS Reciever, Batteries THEORY: The Global Positioning System (GPS) Is A Satellite-Based Navigation andram reddyNo ratings yet
- 3a.1.2 - GPS ErrorsDocument34 pages3a.1.2 - GPS ErrorsParamjot SinghNo ratings yet
- Interferometric Synthetic Aperture Radar - Wikipedia, The Free EncyclopediaDocument9 pagesInterferometric Synthetic Aperture Radar - Wikipedia, The Free EncyclopediakowsilaxNo ratings yet
- Global Positioning System: Paper Presentation OnDocument10 pagesGlobal Positioning System: Paper Presentation OnSravan Kumar100% (1)
- Global Positioning SystemDocument10 pagesGlobal Positioning SystemAnkit GuptaNo ratings yet
- Faculty of Architecture GpsDocument3 pagesFaculty of Architecture GpsgladysNo ratings yet
- Sattelite Communications (6) (1) - 150-166Document17 pagesSattelite Communications (6) (1) - 150-166ks.umashankerNo ratings yet
- Carrier Phase DGPSDocument3 pagesCarrier Phase DGPSparareceberspamsNo ratings yet
- Remote Sensing & Geospatial Technologies Dictionary: Grow Your Vocabulary, #55From EverandRemote Sensing & Geospatial Technologies Dictionary: Grow Your Vocabulary, #55No ratings yet
- Global Navigation Satellite System Monitoring of the AtmosphereFrom EverandGlobal Navigation Satellite System Monitoring of the AtmosphereNo ratings yet
- The SatNav Users Guide to Navigation and Mapping Using GPSFrom EverandThe SatNav Users Guide to Navigation and Mapping Using GPSRating: 1 out of 5 stars1/5 (2)
- Uncertainties in GPS Positioning: A Mathematical DiscourseFrom EverandUncertainties in GPS Positioning: A Mathematical DiscourseRating: 3 out of 5 stars3/5 (2)
- Hnp17ce V405r02ceDocument5 pagesHnp17ce V405r02cejoe abdulNo ratings yet
- Manual EG - 3400 3500Document844 pagesManual EG - 3400 3500Abdallah AbdelrehimNo ratings yet
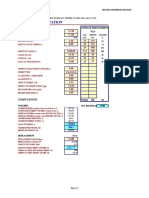
- StrengthDocument2 pagesStrengthAmmar Bany AtaNo ratings yet
- Casing Cement DesignDocument2 pagesCasing Cement DesignMohamad TayeaNo ratings yet
- NCSC Writeup ChemistryDocument9 pagesNCSC Writeup Chemistryreadingchallenge jnvsklm100% (1)
- MATLAB Symbolic Math ToolboxDocument300 pagesMATLAB Symbolic Math ToolboxelfrichNo ratings yet
- Bock 50 HZ Condensing Units New GenDocument6 pagesBock 50 HZ Condensing Units New Gencristobal sanchez ponceNo ratings yet
- Industrial Building, Design of Steel Structure Part 2, Types of LoadsDocument36 pagesIndustrial Building, Design of Steel Structure Part 2, Types of LoadsRaju Sharma100% (3)
- Step Perancangan Filter Digital IIRDocument31 pagesStep Perancangan Filter Digital IIRIndomi doubleNo ratings yet
- E-Series Installation ManuaDocument136 pagesE-Series Installation Manuaraul sanchezNo ratings yet
- Alberta Energy Regulator Directive 055Document69 pagesAlberta Energy Regulator Directive 055Joel MadsenNo ratings yet
- Morphotablet 2: Taking Mobile Secure Identification To The Next LevelDocument4 pagesMorphotablet 2: Taking Mobile Secure Identification To The Next LevelSammy PauloNo ratings yet
- No List of Students Msc. Civil Engineering - Pausti 6 Cohort Serial No Reg. No Name Thesis Title Comment/Proposed Supervisor (S)Document4 pagesNo List of Students Msc. Civil Engineering - Pausti 6 Cohort Serial No Reg. No Name Thesis Title Comment/Proposed Supervisor (S)WazalouaNo ratings yet
- The Decadent Gardener ResearchDocument9 pagesThe Decadent Gardener ResearchEmma FosterNo ratings yet
- What Is The Great Pacific Garbage PatchDocument3 pagesWhat Is The Great Pacific Garbage Patchnana rayneNo ratings yet
- A Proposed Disaster-Proof Socialized Housing and Community CenterDocument18 pagesA Proposed Disaster-Proof Socialized Housing and Community CenterEunice VargasNo ratings yet
- Mtap 2015Document10 pagesMtap 2015irec100% (2)
- Manual Industrial Stationary 43L 57L LPG CNGDocument37 pagesManual Industrial Stationary 43L 57L LPG CNGCarlaNo ratings yet
- Helpful HintsDocument1 pageHelpful HintsGarth DemetrioffNo ratings yet
- Resolution A.851 - 20Document12 pagesResolution A.851 - 20Андрей ПримакNo ratings yet
- Gender Role and SocializationDocument42 pagesGender Role and SocializationHye JinNo ratings yet
- 1252Document7 pages1252Joel BrasilBorgesNo ratings yet
- Compare Two Landforms Within A Venn Diagram ResourcesDocument6 pagesCompare Two Landforms Within A Venn Diagram Resourcesapi-335617097100% (1)
- VALLES & HILLS - CV1200 CatalogueDocument2 pagesVALLES & HILLS - CV1200 CatalogueMiguel PostigoNo ratings yet
- PiriReis TDocument68 pagesPiriReis TManuel CapdevilaNo ratings yet
- Disk and OE MatrixDocument15 pagesDisk and OE MatrixAnthony ThomasNo ratings yet