Download as ppt, pdf, or txt
You might also like
- Classification of Signals & SystemsDocument82 pagesClassification of Signals & SystemsRaja Desingu94% (16)
- Introduction To Signal & SystemsDocument40 pagesIntroduction To Signal & Systemsusama tariq0% (1)
- Sistemas SinalesDocument43 pagesSistemas SinalesAlfonso LugoNo ratings yet
- Communication 1Document87 pagesCommunication 1Trường NguyễnNo ratings yet
- EECS3451 Chapter4Document79 pagesEECS3451 Chapter4nickbekiaris05No ratings yet
- Measurement and InstrumentationDocument61 pagesMeasurement and InstrumentationNikhil WaghalkarNo ratings yet
- Signals and Networks (SEE 2043) Lecture #2: Topics CoveredDocument24 pagesSignals and Networks (SEE 2043) Lecture #2: Topics CoveredIzlaikha AzizNo ratings yet
- Signals and SystemsDocument40 pagesSignals and SystemsAmeen PeNo ratings yet
- DMS Chap5 Part3 FTransformDocument54 pagesDMS Chap5 Part3 FTransformGooftilaaAniJiraachuunkooYesusiinNo ratings yet
- Lecture 02Document11 pagesLecture 02Jerry HalibasNo ratings yet
- The Fourier Series and Fourier TransformDocument55 pagesThe Fourier Series and Fourier TransformShiju RamachandranNo ratings yet
- DSP Using ARMDocument25 pagesDSP Using ARMVinitKharkarNo ratings yet
- Signals and Systems Unit 2: Mit-WpuDocument31 pagesSignals and Systems Unit 2: Mit-WpuZaheen KhanNo ratings yet
- Communication Signals and System Design: K L UniversityDocument11 pagesCommunication Signals and System Design: K L UniversitykarthikNo ratings yet
- The Fourier Series and Fourier TransformDocument55 pagesThe Fourier Series and Fourier Transformnkosana2No ratings yet
- Linear Circuit Analysis (EE-101) : Electric SignalsDocument18 pagesLinear Circuit Analysis (EE-101) : Electric SignalsTehseen HussainNo ratings yet
- State Space RepresentationDocument19 pagesState Space Representationjiraya chiNo ratings yet
- 05 SSA - Fourier SeriesDocument18 pages05 SSA - Fourier SeriesEssa Zulfikar SalasNo ratings yet
- Chapter 2-3 Dynamic CharacteristicsDocument24 pagesChapter 2-3 Dynamic Characteristicsmekinjemal999No ratings yet
- Principle of Communication EngineeringDocument52 pagesPrinciple of Communication Engineeringسعيد ابوسريعNo ratings yet
- Lecture # 01,02 & 03Document31 pagesLecture # 01,02 & 03Abdullah ImranNo ratings yet
- Week 1 - Discrete-Time Signals and Systems (Convolution & Correlation)Document25 pagesWeek 1 - Discrete-Time Signals and Systems (Convolution & Correlation)Adrian WongNo ratings yet
- Signals Basic TypesDocument7 pagesSignals Basic TypesJunaid KaleemNo ratings yet
- Interconnect Delay Models: EE695K VLSI InterconnectDocument16 pagesInterconnect Delay Models: EE695K VLSI InterconnectSuyash SinghNo ratings yet
- Discrete-Time Systems: Discretization, Models and Their PropertiesDocument66 pagesDiscrete-Time Systems: Discretization, Models and Their PropertiesbalkyderNo ratings yet
- ClassWork Unit IVDocument70 pagesClassWork Unit IVHimaBindu ValivetiNo ratings yet
- EEE223 Signals & Systems Fall 2010Document12 pagesEEE223 Signals & Systems Fall 2010Muhammad Usman GhaniNo ratings yet
- AdvDSP Lecture1Document43 pagesAdvDSP Lecture1Alireza DabiryNo ratings yet
- Signal & Systems-DONEDocument40 pagesSignal & Systems-DONEnavNo ratings yet
- Chapter 2Document47 pagesChapter 2alishthaunaNo ratings yet
- Chap 3 ConvolutionDocument10 pagesChap 3 ConvolutionSolomon LemaNo ratings yet
- Lecture 2Document12 pagesLecture 2Lucas SantosNo ratings yet
- SampleingDocument13 pagesSampleinganthony.onyishi.242680No ratings yet
- CH 09Document44 pagesCH 09KavunNo ratings yet
- Signals Basic TypesDocument6 pagesSignals Basic TypesPV sushmithaNo ratings yet
- Signals & SystemDocument26 pagesSignals & SystemMuhammadUsamaNo ratings yet
- EECE 301 NS - 02 CT Signals PDFDocument16 pagesEECE 301 NS - 02 CT Signals PDFJohn CMNo ratings yet
- Telecommunications Engineering: Dr. David Tay Room BG434 X 2529 D.tay@latrobe - Edu.auDocument36 pagesTelecommunications Engineering: Dr. David Tay Room BG434 X 2529 D.tay@latrobe - Edu.auBasit KhanNo ratings yet
- Signals Basic Types: Unit Step FunctionDocument6 pagesSignals Basic Types: Unit Step FunctionGrootNo ratings yet
- Continuous-Time Systems: Dept. of Electrical and Computer Engineering The University of Texas at AustinDocument24 pagesContinuous-Time Systems: Dept. of Electrical and Computer Engineering The University of Texas at AustinEleazar Sierra EspinozaNo ratings yet
- Objectives:: The Sampling TheoremDocument13 pagesObjectives:: The Sampling TheoremSalmaanCadeXaajiNo ratings yet
- Input/output System ModelsDocument4 pagesInput/output System ModelsYassine DjillaliNo ratings yet
- Lecture 04Document13 pagesLecture 04Shiju RamachandranNo ratings yet
- Introduction To Signals & Variables Lecture-2Document17 pagesIntroduction To Signals & Variables Lecture-2seltyNo ratings yet
- 2 Continuous Time SignalsDocument18 pages2 Continuous Time SignalsJr OlivarezNo ratings yet
- 4 Transient Response 19 NovDocument90 pages4 Transient Response 19 NovheroNo ratings yet
- ECE 6151, Spring 2017 Lecture Notes: 1 OutlineDocument7 pagesECE 6151, Spring 2017 Lecture Notes: 1 OutlineLam DinhNo ratings yet
- Fourier Analysis of Signals and Systems: Babul IslamDocument24 pagesFourier Analysis of Signals and Systems: Babul IslamapcandyboyNo ratings yet
- Chapter 1 Signals and Systems: Mathematical Preliminaries: What Is A Signal?Document9 pagesChapter 1 Signals and Systems: Mathematical Preliminaries: What Is A Signal?Kiran maruNo ratings yet
- Signal and System Signal and SystemDocument94 pagesSignal and System Signal and SystempitayutNo ratings yet
- Derivation: S. A. Dorado-RojasDocument27 pagesDerivation: S. A. Dorado-RojasJulian OrtizNo ratings yet
- Proakis, Digital CommunicationsDocument16 pagesProakis, Digital CommunicationsdwirelesNo ratings yet
- CH1 - Basic Signals and Operations PDFDocument56 pagesCH1 - Basic Signals and Operations PDFMuhammed Qaraman0% (1)
- Signals and Systems: Prepared BY Mr. N Nagaraju, Assistant Professor, Mrs. L Shruthi, Assistant ProfessorDocument549 pagesSignals and Systems: Prepared BY Mr. N Nagaraju, Assistant Professor, Mrs. L Shruthi, Assistant ProfessorVenkata Sathish Kumar BNo ratings yet
- 1 SB5103 FourierSeries FourierTransform ModDocument59 pages1 SB5103 FourierSeries FourierTransform ModGandhi NapitupuluNo ratings yet
- Laplace TransformDocument95 pagesLaplace Transformkac2872No ratings yet
- Discrete - Time Signals and SystemsDocument40 pagesDiscrete - Time Signals and Systemsfrankie_tNo ratings yet
- Classification of Signals SystemsDocument77 pagesClassification of Signals Systemsrajalakshmi boopathiNo ratings yet
- DSP Summary02 - Prof. YK Shin - INHA-BEU DDP 2023Document22 pagesDSP Summary02 - Prof. YK Shin - INHA-BEU DDP 2023Nigar QurbanovaNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- What Is String in JavaDocument10 pagesWhat Is String in JavaMd. Nurul AlamNo ratings yet
- Convolutional Neural Network CNN For ImaDocument5 pagesConvolutional Neural Network CNN For ImaMd. Nurul AlamNo ratings yet
- Device DriverDocument2 pagesDevice DriverMd. Nurul AlamNo ratings yet
- DS ML - BrochureDocument20 pagesDS ML - BrochureMd. Nurul AlamNo ratings yet
- Lab 5 Sequence Diagramfinal TermDocument16 pagesLab 5 Sequence Diagramfinal TermMd. Nurul AlamNo ratings yet
- Gathering Target Information: Reconnaissance, Footprinting, and Social Engineering. Kimberly GravesDocument24 pagesGathering Target Information: Reconnaissance, Footprinting, and Social Engineering. Kimberly GravesMd. Nurul AlamNo ratings yet
- Gathering Network and Host Information: Scanning and Enumeration Chapter 3. Kimberly GravesDocument31 pagesGathering Network and Host Information: Scanning and Enumeration Chapter 3. Kimberly GravesMd. Nurul AlamNo ratings yet
- 6 BanglaDocument23 pages6 BanglaMd. Nurul AlamNo ratings yet
- Image Processing Fundamentals: Md. Nurul Alam Limon ID: 2182081003Document33 pagesImage Processing Fundamentals: Md. Nurul Alam Limon ID: 2182081003Md. Nurul AlamNo ratings yet
- Grade - Xii 1ST Quarterly Exam - Date Sheet & SyllabusDocument2 pagesGrade - Xii 1ST Quarterly Exam - Date Sheet & SyllabusPriyanshu KasanaNo ratings yet
- Rolling Element Bearings Vibration AnalysisDocument10 pagesRolling Element Bearings Vibration Analysisi.kamalNo ratings yet
- Spreader Bar For LiftingDocument1 pageSpreader Bar For LiftingTran ThoNo ratings yet
- Energy and Matter Study GuideDocument3 pagesEnergy and Matter Study GuideNorlijun HilutinNo ratings yet
- Determining Potential Vertical RiseDocument4 pagesDetermining Potential Vertical RiseMin PINNo ratings yet
- June 2018 MS - Paper 1 Edexcel Maths AS-levelDocument31 pagesJune 2018 MS - Paper 1 Edexcel Maths AS-levelmaya 1DNo ratings yet
- Application of Computational Chemistry in Material ModelingDocument5 pagesApplication of Computational Chemistry in Material ModelingBeeki MANo ratings yet
- Iec 61238Document46 pagesIec 61238RamNo ratings yet
- CS168: The Modern Algorithmic Toolbox Lecture #9: The Singular Value Decomposition (SVD) and Low-Rank Matrix ApproximationsDocument11 pagesCS168: The Modern Algorithmic Toolbox Lecture #9: The Singular Value Decomposition (SVD) and Low-Rank Matrix ApproximationsOnkar PanditNo ratings yet
- AbsenceDocument1 pageAbsencegh 10No ratings yet
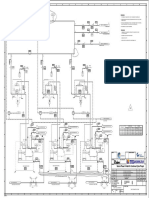
- JO003-10-LA - MDD-IDM-001-4 Feedwater System P&IDDocument3 pagesJO003-10-LA - MDD-IDM-001-4 Feedwater System P&IDHasan MustafaNo ratings yet
- COMPEL - The International Journal For Computation and Mathematics in Electrical and Electronic EngineeringDocument20 pagesCOMPEL - The International Journal For Computation and Mathematics in Electrical and Electronic EngineeringOugraz hassanNo ratings yet
- Computer GraphicsDocument38 pagesComputer GraphicsWafa ElgalhoudNo ratings yet
- Reactor Containment Research - Nuclear Regulatory Commission DataDocument206 pagesReactor Containment Research - Nuclear Regulatory Commission Datacagerton100% (1)
- Constraints On The Antistar Fraction in The Solar System Neighborhood From The 10-Years Fermi Large Area Telescope Gamma-Ray Source CatalogDocument22 pagesConstraints On The Antistar Fraction in The Solar System Neighborhood From The 10-Years Fermi Large Area Telescope Gamma-Ray Source CatalogTu ciencia mi ciencia Esteban OspinaNo ratings yet
- Motion in One Dimension Practice Sheet - 5Document1 pageMotion in One Dimension Practice Sheet - 5Vaibhav SrivastavaNo ratings yet
- Homework Packet - Unit 3 PDFDocument6 pagesHomework Packet - Unit 3 PDFPhoebe LinNo ratings yet
- The Optical Properties of Magnesium Oxide ContainiDocument6 pagesThe Optical Properties of Magnesium Oxide ContainiAbdulbar kelilNo ratings yet
- AISI Design Guide D111-09 Design Guide For Cold-Formed Steel Purlin Roof Framing Systems (Canvas)Document203 pagesAISI Design Guide D111-09 Design Guide For Cold-Formed Steel Purlin Roof Framing Systems (Canvas)Nguyen Co ThachNo ratings yet
- Marienfeld - Counting ChambersDocument5 pagesMarienfeld - Counting ChambersHà Anh Minh Lê100% (1)
- HD785-7 SEN01274-15 Shop Manual-1407-1607Document201 pagesHD785-7 SEN01274-15 Shop Manual-1407-1607Muhammad RizqiNo ratings yet
- Crushable Foam Plasticity ModelsDocument11 pagesCrushable Foam Plasticity ModelsNayanaNo ratings yet
- Shooting Method ScilabDocument4 pagesShooting Method Scilab106 -Shivam ChaharNo ratings yet
- Zaki Saudagar Physics Part 2 Complete Notes Class 12 CBSEboardspdfDocument60 pagesZaki Saudagar Physics Part 2 Complete Notes Class 12 CBSEboardspdf87vnqbkqkcNo ratings yet
- 9th Physics 200 Imp. MCQs - SolutionDocument10 pages9th Physics 200 Imp. MCQs - SolutionMUHAMMAD SOHAIL KASWARNo ratings yet
- CIE IGCSE Physics 3rd Edition Chapter 3Document25 pagesCIE IGCSE Physics 3rd Edition Chapter 3MELODY CHENNo ratings yet
- BTM1313 FE Set 2 Online756Document11 pagesBTM1313 FE Set 2 Online756kameeneNo ratings yet
- Composite Materials Note Form Nptel in PDFDocument33 pagesComposite Materials Note Form Nptel in PDFM.Thirunavukkarasu100% (1)
- Azərbaycan Dövlət Dəniz Akademiyasi: Tərtib Edən: Osmanov ElçinDocument9 pagesAzərbaycan Dövlət Dəniz Akademiyasi: Tərtib Edən: Osmanov ElçinФаиг ИсаевNo ratings yet
- Solar Energy and Radiation Terminologies: Dr. Sudhir KumarDocument24 pagesSolar Energy and Radiation Terminologies: Dr. Sudhir KumarAyman OsamaNo ratings yet