Download as pptx, pdf, or txt
You might also like
- Mathematics For Economists: Linear Models and Matrix AlgebraDocument58 pagesMathematics For Economists: Linear Models and Matrix AlgebraELEFTHERIOS GIOVANISNo ratings yet
- Toán Ứng Dụng Giáo TrìnhDocument123 pagesToán Ứng Dụng Giáo TrìnhHoàng SơnNo ratings yet
- K00228 - 20180909222020 - Lecture Note - Chapter 1Document101 pagesK00228 - 20180909222020 - Lecture Note - Chapter 1AbdulRahim059No ratings yet
- Chapter 1Document92 pagesChapter 1LEE LEE LAUNo ratings yet
- Screenshot 2022-10-04 at 1.06.18 PMDocument317 pagesScreenshot 2022-10-04 at 1.06.18 PMعبدالرحمن الحازميNo ratings yet
- Matrices and DeterminantsDocument37 pagesMatrices and DeterminantsKiran MittalNo ratings yet
- Matrices and Determinants - 1Document36 pagesMatrices and Determinants - 1Ahmed YasserNo ratings yet
- 4038CEM Engineering Mathematics I 4010CEM Mathematics For Physics and EngineeringDocument20 pages4038CEM Engineering Mathematics I 4010CEM Mathematics For Physics and EngineeringMicah TamunoNo ratings yet
- EMS 112-Topic 1-MatrixDocument88 pagesEMS 112-Topic 1-MatrixLiberatus MpetaNo ratings yet
- Meb 2023 Lec 11Document14 pagesMeb 2023 Lec 11ngovietha406No ratings yet
- 2 Operations On MatricesDocument44 pages2 Operations On MatricesKarlzNo ratings yet
- Matrices: A A A A A ADocument449 pagesMatrices: A A A A A AnaverfallNo ratings yet
- Matrices & Operations: Chapter One Week OneDocument31 pagesMatrices & Operations: Chapter One Week OnetrahNo ratings yet
- Operations With MatricesDocument10 pagesOperations With MatricesSameer Ali MohamedNo ratings yet
- 2023week6 PreDocument3 pages2023week6 PreNiroshan KarunarathnaNo ratings yet
- Matrices and DeterminantsDocument15 pagesMatrices and DeterminantsvighneshmanojNo ratings yet
- Ch.2 Topic 4 7 MathsDocument24 pagesCh.2 Topic 4 7 Mathshildamezmur9No ratings yet
- 2. Matrix Algebra (3)Document76 pages2. Matrix Algebra (3)Jeffrey ChanNo ratings yet
- ch02 NTUST Mathematics For ManagementDocument68 pagesch02 NTUST Mathematics For Management李雅靜No ratings yet
- LAO-CS 1 - Ganesh D HandADocument62 pagesLAO-CS 1 - Ganesh D HandAmanoj kumar sethyNo ratings yet
- Sma 212 NotesDocument76 pagesSma 212 NotesSammyNo ratings yet
- 9 VectorsAndMatricesDocument8 pages9 VectorsAndMatricesMohammed AbdallahNo ratings yet
- Midterm Examination: Faculty of Computer Studies M132 Linear AlgebraDocument5 pagesMidterm Examination: Faculty of Computer Studies M132 Linear AlgebraDima Taha100% (1)
- Midterm Examination: Faculty of Computer Studies M132 Linear AlgebraDocument5 pagesMidterm Examination: Faculty of Computer Studies M132 Linear AlgebraDima TahaNo ratings yet
- MIT18 02SC MNotes m1 PDFDocument4 pagesMIT18 02SC MNotes m1 PDFNABIL HUSSAINNo ratings yet
- Matrix and DeterminantsDocument53 pagesMatrix and Determinantsarunesh shrivastavaNo ratings yet
- Mat RiceDocument46 pagesMat RiceSir Kay SwissNo ratings yet
- Unit Six (10) ECON 1003 MATRICESDocument27 pagesUnit Six (10) ECON 1003 MATRICESFitzmore PetersNo ratings yet
- 1 Matrices 1hourDocument49 pages1 Matrices 1houralia syuhadaNo ratings yet
- Bridging Math MatrixDocument4 pagesBridging Math MatrixHtoo Kyaw HlaingNo ratings yet
- Class Xii Maths Chapter 3 (Matrices) (Includes Competency-Based Test Items) Marks WiseDocument52 pagesClass Xii Maths Chapter 3 (Matrices) (Includes Competency-Based Test Items) Marks Wisem.geethuroseNo ratings yet
- Xii Maths Chapter 3 MatricesDocument58 pagesXii Maths Chapter 3 MatricesdpcdglNo ratings yet
- CE511 Lecture #2Document33 pagesCE511 Lecture #2Tawhid ShajadNo ratings yet
- Engineering Mathematics IIIDocument17 pagesEngineering Mathematics IIIbethuyegoNo ratings yet
- MA111 Lec3 S2 2019Document20 pagesMA111 Lec3 S2 2019Joseph FaleafagaNo ratings yet
- Mathematics For Finance: Name Id No Part-I Say True or False (1 Pts Each)Document4 pagesMathematics For Finance: Name Id No Part-I Say True or False (1 Pts Each)temedebereNo ratings yet
- Matrix AlgebraDocument21 pagesMatrix AlgebraivanmrnNo ratings yet
- Asset-V1 VIT+BMT1005+2020+type@asset+block@week 2 Lecture Notes PDFDocument17 pagesAsset-V1 VIT+BMT1005+2020+type@asset+block@week 2 Lecture Notes PDFAYUSH GURTUNo ratings yet
- Linearna AlgebraDocument40 pagesLinearna AlgebraMartina ZorićNo ratings yet
- Matrix AlgebraDocument38 pagesMatrix AlgebraChill KwongNo ratings yet
- 4.3 (A) - Inverse MatricesDocument23 pages4.3 (A) - Inverse MatricessureintharaanNo ratings yet
- Nota Math MatrikDocument39 pagesNota Math MatrikHelfi Ramli100% (1)
- Antonchap1 MatrixinverseDocument22 pagesAntonchap1 Matrixinverseapi-261282952No ratings yet
- Bms 102 Notes - Matrix Algebra and ApplicationsDocument45 pagesBms 102 Notes - Matrix Algebra and ApplicationsNereah DebrahNo ratings yet
- 12 W 09Document6 pages12 W 09Edmond AbdouNo ratings yet
- Matrix Algebra ReviewDocument35 pagesMatrix Algebra ReviewWit FungNo ratings yet
- Advanced Mathematics - Unit 03 (English)Document8 pagesAdvanced Mathematics - Unit 03 (English)tharushikavi95No ratings yet
- CH 5 Math 101E 2015Document21 pagesCH 5 Math 101E 2015amr khaledNo ratings yet
- Properties of MstrixDocument40 pagesProperties of MstrixfitriirmaNo ratings yet
- Ii Pu Revision - Model Question Paper 2023 (Amd)Document28 pagesIi Pu Revision - Model Question Paper 2023 (Amd)Ankitha S.SNo ratings yet
- Lecture # 3: Linear Algebra and Analytical GeometryDocument6 pagesLecture # 3: Linear Algebra and Analytical GeometryTooba AkhtarNo ratings yet
- 001 - Lecture - 3 - Annotated - Matrix MultiplicationDocument25 pages001 - Lecture - 3 - Annotated - Matrix MultiplicationSahana NayakaNo ratings yet
- Matrices Lecture Notes 2Document48 pagesMatrices Lecture Notes 2Readowan NiloyNo ratings yet
- Matrices and Determinants Topic 3: Aa A Aa A A A Aa ADocument9 pagesMatrices and Determinants Topic 3: Aa A Aa A A A Aa ASyed Abdul Mussaver ShahNo ratings yet
- Matrix Questions Bridge CourseDocument18 pagesMatrix Questions Bridge Courseekgamer444No ratings yet
- Problem 0: Akshya Gupta September 13, 2021Document48 pagesProblem 0: Akshya Gupta September 13, 2021Akshya_Gupta_8086No ratings yet
- PlymouthUniversity MathsandStats Matrix MultiplicationDocument37 pagesPlymouthUniversity MathsandStats Matrix MultiplicationGood DeedsNo ratings yet
- 05 Matrices and Hill CipherDocument98 pages05 Matrices and Hill Ciphertrending.spot007No ratings yet
- Linear Algebra Recap (Mainly On Matrix)Document36 pagesLinear Algebra Recap (Mainly On Matrix)abdi dejeneNo ratings yet
- Matrix Theory and Applications for Scientists and EngineersFrom EverandMatrix Theory and Applications for Scientists and EngineersNo ratings yet
- Topic 1Document131 pagesTopic 1Ab BNo ratings yet
- Topic 2Document9 pagesTopic 2Ab BNo ratings yet
- A231 Issues in Nutrition SuzitaDocument33 pagesA231 Issues in Nutrition SuzitaAb BNo ratings yet
- Assignment 1 Sma3013 (Linear Algebra) SEMESTER 1 2020/2021 (45 MARKS) DUE DATE: 30/11/2020 (Monday)Document3 pagesAssignment 1 Sma3013 (Linear Algebra) SEMESTER 1 2020/2021 (45 MARKS) DUE DATE: 30/11/2020 (Monday)Ab BNo ratings yet
- Sma3013 Linear Algebra SEMESTER 1 2020/2021Document52 pagesSma3013 Linear Algebra SEMESTER 1 2020/2021Ab BNo ratings yet
- Sma3013 Linear Algebra SEMESTER 1 2020/2021Document53 pagesSma3013 Linear Algebra SEMESTER 1 2020/2021Ab BNo ratings yet
- LabVIEW MathScriptDocument57 pagesLabVIEW MathScriptKemal Maulana AlhasaNo ratings yet
- 9th Mathematics Definitions EngDocument5 pages9th Mathematics Definitions EngHabib Ullah100% (1)
- Free Vibrations of Circular Cylindrical ShellsDocument67 pagesFree Vibrations of Circular Cylindrical ShellsSergeyNo ratings yet
- Alexander Altland, Jan Von Delft - Mathematics For Physicists - Introductory Concepts and Methods (2019, Cambridge University Press)Document721 pagesAlexander Altland, Jan Von Delft - Mathematics For Physicists - Introductory Concepts and Methods (2019, Cambridge University Press)Esteban Bellizzia100% (2)
- MATRICES and DETERMINANTSDocument10 pagesMATRICES and DETERMINANTSKrishansh GuptaNo ratings yet
- Nodia and Company: Gate Solved Paper Electrical Engineering 2015-1Document50 pagesNodia and Company: Gate Solved Paper Electrical Engineering 2015-1pankajNo ratings yet
- TenerefeposterDocument1 pageTenerefeposterIbrahim AdamouNo ratings yet
- Question-361189 (1) Maths 12th McqsDocument22 pagesQuestion-361189 (1) Maths 12th McqsTrupti JadhaoNo ratings yet
- CH 1 Vector Algebra Fall 18Document78 pagesCH 1 Vector Algebra Fall 18Queen BlackNo ratings yet
- Exercises: Basic Quantum Mechanics: D DX D DXDocument12 pagesExercises: Basic Quantum Mechanics: D DX D DXwsosornozNo ratings yet
- Geometry of Polynomials 5ae4a0ed7f8b9a283f8b458eDocument48 pagesGeometry of Polynomials 5ae4a0ed7f8b9a283f8b458eRadha SureshNo ratings yet
- Jeevan MathsDocument100 pagesJeevan MathsSanthosh ViswanadhNo ratings yet
- STPM Sem 1 Mathematics Assignment (Matrice)Document7 pagesSTPM Sem 1 Mathematics Assignment (Matrice)Lai ChungyiNo ratings yet
- Class Xii-DeterminantDocument32 pagesClass Xii-DeterminantTirth Tupe100% (1)
- Contributions To History of DeterminantsDocument442 pagesContributions To History of DeterminantsadriellemendelloNo ratings yet
- Matrices Determinants MSDocument42 pagesMatrices Determinants MSRenario Gule Hinampas Jr.No ratings yet
- Matrices, Determinant and InverseDocument12 pagesMatrices, Determinant and InverseRIZKIKI100% (1)
- Complec Vector Spaces - LarsonDocument42 pagesComplec Vector Spaces - LarsonAgung ManaluNo ratings yet
- Engineering Mathematics IIDocument102 pagesEngineering Mathematics IIIsaac P PlanNo ratings yet
- CH 4 Incremental Elastoplastic Analysis-Hinge by Hinge MethodDocument31 pagesCH 4 Incremental Elastoplastic Analysis-Hinge by Hinge MethodJose2806No ratings yet
- University of Cambridge Faculty of MathematicsDocument13 pagesUniversity of Cambridge Faculty of Mathematicsabdullah tawshikNo ratings yet
- Pa-1 QP XiiDocument7 pagesPa-1 QP XiiAshish GambhirNo ratings yet
- Xii Maths SSM - 2023 Ro DDN (VN)Document202 pagesXii Maths SSM - 2023 Ro DDN (VN)bhattuttu7No ratings yet
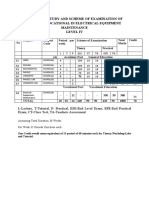
- Course of Study and Scheme of Examination of Diploma Vocational in Electrical Equipment Maintenance Level IvDocument20 pagesCourse of Study and Scheme of Examination of Diploma Vocational in Electrical Equipment Maintenance Level IvDhirranaNo ratings yet
- Jacobians of Matrix Transformations PDFDocument56 pagesJacobians of Matrix Transformations PDFevan igorNo ratings yet
- Reg. No. - Name: - SigDocument2 pagesReg. No. - Name: - SigBahauddin BalochNo ratings yet
- Complex Analysis, Gamelin, II.7 Problems and SolutionsDocument5 pagesComplex Analysis, Gamelin, II.7 Problems and SolutionsC. Ephrem StuyvesantNo ratings yet
- DETERMINANTDocument26 pagesDETERMINANTVitaliana VillaverdeNo ratings yet
- Syllabus in Introduction To Applied Math FinalDocument11 pagesSyllabus in Introduction To Applied Math FinalMariecris Barayuga Duldulao-AbelaNo ratings yet