Download as pptx, pdf, or txt
You might also like
- Types of Discontinuities: Quick OverviewDocument6 pagesTypes of Discontinuities: Quick OverviewQurban HanifNo ratings yet
- Hidraulik-Hydrostatic Pressure ApparatusDocument16 pagesHidraulik-Hydrostatic Pressure ApparatusMohd AmranNo ratings yet
- Chapter 2 Market Forces-Demand and SupplyDocument29 pagesChapter 2 Market Forces-Demand and SupplyArio Wirawan PrakosoNo ratings yet
- TABLE 6.2.1 Elementary Laplace TransformsDocument1 pageTABLE 6.2.1 Elementary Laplace TransformsAtakan ZeybekNo ratings yet
- PID Loop Tuning Pocket Guide DS405E BookletDocument6 pagesPID Loop Tuning Pocket Guide DS405E Booklethenryhariyadi100% (2)
- Linear Discriminant Functions: CS479/679 Pattern Recognition Dr. George BebisDocument41 pagesLinear Discriminant Functions: CS479/679 Pattern Recognition Dr. George BebispiyushNo ratings yet
- CpE646 9v3 PDFDocument45 pagesCpE646 9v3 PDFGurpreet SinghNo ratings yet
- Linear Models For Classification: Sumeet Agarwal, EEL709 (Most Figures From Bishop, PRML)Document21 pagesLinear Models For Classification: Sumeet Agarwal, EEL709 (Most Figures From Bishop, PRML)Anonymous BqTt5TdDSNo ratings yet
- ML Co4 Session 29Document36 pagesML Co4 Session 29Shylandra BhanuNo ratings yet
- PR January20 04 PDFDocument40 pagesPR January20 04 PDFNadia AnjumNo ratings yet
- Nov 9 2020 AnnotatedDocument17 pagesNov 9 2020 AnnotatedSherif MagdyNo ratings yet
- NLP SlidesDocument201 pagesNLP Slidesadarsh2dayNo ratings yet
- Kuliah 8 Hidrologi - 2017Document22 pagesKuliah 8 Hidrologi - 2017Agie RamdiansyahNo ratings yet
- (IT413P) Pattern Recognition Grade Four DR: Nagham MekkyDocument30 pages(IT413P) Pattern Recognition Grade Four DR: Nagham MekkyMustafa ElmalkyNo ratings yet
- MTH403 (23-28)Document28 pagesMTH403 (23-28)Tahir KhanNo ratings yet
- PROCEDIMIENTO BLACKBOARD PARA AUDIENCIA JUDICIAL Urgente PDFDocument55 pagesPROCEDIMIENTO BLACKBOARD PARA AUDIENCIA JUDICIAL Urgente PDFDenilson Carlo PichonNo ratings yet
- Mathheematics For Science Week 2 Lecture NotesDocument8 pagesMathheematics For Science Week 2 Lecture Notescovid19problemzNo ratings yet
- Cheatsheet Variables ModelsDocument4 pagesCheatsheet Variables ModelsTấn Lộc Phạm HuỳnhNo ratings yet
- DL (Unit I)Document25 pagesDL (Unit I)arunkrishnaaiswarya108No ratings yet
- Section1 2-FilledDocument9 pagesSection1 2-FilledSononameNo ratings yet
- Wireless CommunicationsDocument273 pagesWireless CommunicationsAmrAraagNo ratings yet
- Lda PDFDocument47 pagesLda PDFAiz DanNo ratings yet
- Class23 26 LinearClassification NeuralNetworks - 05 15nov2019Document35 pagesClass23 26 LinearClassification NeuralNetworks - 05 15nov2019Saili MishraNo ratings yet
- Lectures 20Document82 pagesLectures 20sudhansh kumarNo ratings yet
- Hdout Chap 2 5210Document42 pagesHdout Chap 2 5210park ji hyeNo ratings yet
- B For I 1,, M: N J J JDocument19 pagesB For I 1,, M: N J J Jضيٍَِِ الكُمرNo ratings yet
- Announcements: - Office HoursDocument10 pagesAnnouncements: - Office HoursSherif MagdyNo ratings yet
- Distance Metrics and Data Transformations: Jianxin WuDocument25 pagesDistance Metrics and Data Transformations: Jianxin WuXg WuNo ratings yet
- STAT 342 Statistical Methods For EngineersDocument26 pagesSTAT 342 Statistical Methods For EngineersHamzaBaigNo ratings yet
- Notes HQDocument96 pagesNotes HQPiyush AgrahariNo ratings yet
- Constrained OptimizationDocument10 pagesConstrained OptimizationCourtney WilliamsNo ratings yet
- An Idiot Guide To SVMDocument25 pagesAn Idiot Guide To SVMLjiljana Đurić-DelićNo ratings yet
- Calculus GuideDocument12 pagesCalculus GuideShahriar KNo ratings yet
- MMW (Lect #2) TransDocument3 pagesMMW (Lect #2) TransChristine Mhae DavidNo ratings yet
- Assignment 3Document8 pagesAssignment 3adengrayson17No ratings yet
- Lecture 8Document19 pagesLecture 8huichloemailNo ratings yet
- Process CalculationDocument11 pagesProcess CalculationAshwini MunirathnamNo ratings yet
- IIT Madras Notes Machine LearningDocument13 pagesIIT Madras Notes Machine LearningR Gowri PrasadNo ratings yet
- Fundamentals For Finite Element MethodDocument34 pagesFundamentals For Finite Element MethodnaderNo ratings yet
- 3.1 Characteristics of Polynomial Functions: y - Intercept and The Constant TermDocument6 pages3.1 Characteristics of Polynomial Functions: y - Intercept and The Constant TermJustine WilliamsNo ratings yet
- 3 Non Linear ClassifiersDocument74 pages3 Non Linear ClassifiersVaishali DNo ratings yet
- 1 CalculusDocument62 pages1 CalculusPrateek SInghNo ratings yet
- Temario Prueba Nota 2 PDFDocument1 pageTemario Prueba Nota 2 PDFFelipe AndradeNo ratings yet
- Gen Math ReviewerDocument4 pagesGen Math ReviewerRaiza SarteNo ratings yet
- Fem FormulationDocument14 pagesFem Formulationmichael KetselaNo ratings yet
- FEM - 3 Weighted ResidualsDocument49 pagesFEM - 3 Weighted Residualswiyorejesend22u.infoNo ratings yet
- Chapter 2 Random VariableDocument30 pagesChapter 2 Random Variableosm83132947No ratings yet
- Feature Detection: Jayanta Mukhopadhyay Dept. of Computer Science and EnggDocument54 pagesFeature Detection: Jayanta Mukhopadhyay Dept. of Computer Science and EnggsutanuberaNo ratings yet
- Lec3 Gradient Based Method Part IDocument30 pagesLec3 Gradient Based Method Part IAbhay JindalNo ratings yet
- Lecture 2 - Weighted Residual TechniquesDocument77 pagesLecture 2 - Weighted Residual TechniquesBalasubramani vNo ratings yet
- c01FunctionsAndGraphs Holiday HomeworkDocument102 pagesc01FunctionsAndGraphs Holiday Homeworkkan0026No ratings yet
- Week 3 General MathematicsDocument10 pagesWeek 3 General MathematicsMarcel Baring ImperialNo ratings yet
- Calculus FULLDocument107 pagesCalculus FULLkanishkaNo ratings yet
- Probability Distributions: Wind Loading and Structural Response Lecture 3 Dr. J.D. HolmesDocument21 pagesProbability Distributions: Wind Loading and Structural Response Lecture 3 Dr. J.D. HolmesBridget Anne BenitezNo ratings yet
- Assignment Probability IIDocument6 pagesAssignment Probability IIMUSIC TRAPSNo ratings yet
- Gradient Based OptimizationDocument24 pagesGradient Based OptimizationMarc RomaníNo ratings yet
- Probability & Cumulative Distribution Functions: Yatin VasavaDocument39 pagesProbability & Cumulative Distribution Functions: Yatin Vasavadilawar sumraNo ratings yet
- Chapter 4: Linear Models For Classification: Grit Hein & Susanne LeibergDocument21 pagesChapter 4: Linear Models For Classification: Grit Hein & Susanne LeiberglalaNo ratings yet
- Gen Math ReviewerDocument4 pagesGen Math ReviewerRaiza Joy SarteNo ratings yet
- Chapter5 Random Signal Processing and Spectrum AnalysisDocument24 pagesChapter5 Random Signal Processing and Spectrum AnalysisVo Duy KhanhNo ratings yet
- SA29Aug17Document13 pagesSA29Aug17Muhammad DeralNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Cohomology of Quotients in Symplectic and Algebraic Geometry. (MN-31), Volume 31From EverandCohomology of Quotients in Symplectic and Algebraic Geometry. (MN-31), Volume 31No ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Nov 9 2020 AnnotatedDocument17 pagesNov 9 2020 AnnotatedSherif MagdyNo ratings yet
- Announcements: - Office HoursDocument10 pagesAnnouncements: - Office HoursSherif MagdyNo ratings yet
- Course Enrollment On Blackboard: Announced On E-ComDocument26 pagesCourse Enrollment On Blackboard: Announced On E-ComSherif MagdyNo ratings yet
- ML in The News: Google Deepmind'S Deep Q-Learning PL Aying Atari Breako UtDocument18 pagesML in The News: Google Deepmind'S Deep Q-Learning PL Aying Atari Breako UtSherif MagdyNo ratings yet
- AI321: Theoretical Foundations of Machine Learning: Dr. Motaz El-SabanDocument44 pagesAI321: Theoretical Foundations of Machine Learning: Dr. Motaz El-SabanSherif MagdyNo ratings yet
- Msrit 7-8 Sem Syllabus BookDocument55 pagesMsrit 7-8 Sem Syllabus BookWendy Bass100% (1)
- Matrix Operations (+,-, ,/) in C/CPP Using PthreadsDocument5 pagesMatrix Operations (+,-, ,/) in C/CPP Using PthreadsVedang BhangeNo ratings yet
- RBEsDocument94 pagesRBEslokeeiNo ratings yet
- Singular Value Decomposition ExampleDocument5 pagesSingular Value Decomposition Exampledev1712100% (2)
- Fir Kaiser Window Notes-3 PDFDocument19 pagesFir Kaiser Window Notes-3 PDFprajwalNo ratings yet
- Mechanical Engineering Course StructureDocument5 pagesMechanical Engineering Course StructureReggi ThompsonNo ratings yet
- Eureka Math Grade 2 Module 2 Parent Tip Sheet 1Document2 pagesEureka Math Grade 2 Module 2 Parent Tip Sheet 1api-236750381No ratings yet
- Chapter Ii PDFDocument12 pagesChapter Ii PDFDiane Joy Fojas PanganibanNo ratings yet
- Bertrand Russell and The Origins of The Set-Theoretic 'Paradoxes'. Alejandro R. GarciadiegoDocument286 pagesBertrand Russell and The Origins of The Set-Theoretic 'Paradoxes'. Alejandro R. GarciadiegoGustavo OvatsugNo ratings yet
- CE CurriculumDocument1 pageCE Curriculummmarti16No ratings yet
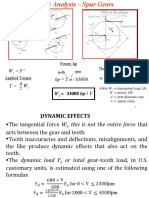
- HP T N / 63000 T W W F: Transmitted Load, LBDocument35 pagesHP T N / 63000 T W W F: Transmitted Load, LBLayike Alemayehu100% (1)
- Transient Stability Margin Prediction Using Equal-Area CriterionDocument9 pagesTransient Stability Margin Prediction Using Equal-Area CriterionVerruumm AmineNo ratings yet
- Stat and Prob Q1 M2Document10 pagesStat and Prob Q1 M2Sakusaku100% (1)
- NMCP Unit 6Document3 pagesNMCP Unit 6Shashikant PrasadNo ratings yet
- 9th Math, CH 4, Ex 4.1Document18 pages9th Math, CH 4, Ex 4.1Arfa MalikNo ratings yet
- Rotational Motion SolutionsxDocument12 pagesRotational Motion SolutionsxAlthea RivadeloNo ratings yet
- 4 - Binary TreesDocument39 pages4 - Binary TreesAnonymous zK1oHu0zNo ratings yet
- 24 - Logic Gates and Truth TablesDocument21 pages24 - Logic Gates and Truth Tablesnandha87No ratings yet
- Instrumental Analytical Methods Experiment 10 - Conductometric Titration of Sulfuric and Acetic AcidDocument5 pagesInstrumental Analytical Methods Experiment 10 - Conductometric Titration of Sulfuric and Acetic Acidapi-235187189No ratings yet
- BIOC 604: Biostatistics and Data Analysis.: DR - Abdalaziz Alanazi and DR - Randa AlharbiDocument25 pagesBIOC 604: Biostatistics and Data Analysis.: DR - Abdalaziz Alanazi and DR - Randa Alharbiنايف محمد القباتليNo ratings yet
- F4 1functionsDocument39 pagesF4 1functionsAric GohNo ratings yet
- Zkfinger SDK 5.0 - enDocument50 pagesZkfinger SDK 5.0 - enJens Angulo RodriguezNo ratings yet
- (Mathematical Surveys and Monographs 248) Paul B. Larson, Jindřich Zapletal - GeometDocument344 pages(Mathematical Surveys and Monographs 248) Paul B. Larson, Jindřich Zapletal - GeometOmar Perez VelozNo ratings yet
- Measurement of Interest - SlidesDocument47 pagesMeasurement of Interest - SlidesSamir Arun BhucharNo ratings yet
- Logic Gate BookDocument33 pagesLogic Gate BookShubham AryaNo ratings yet
- Micro-, Meso - and Macro-Dynamics of The Brain (György Buzsáki, Yves Christen (Eds.) )Document181 pagesMicro-, Meso - and Macro-Dynamics of The Brain (György Buzsáki, Yves Christen (Eds.) )Fernando CostaNo ratings yet