Download as pptx, pdf, or txt
You might also like
- How To Build and Operate Shaker TablesDocument69 pagesHow To Build and Operate Shaker TablesAFLAC ............92% (26)
- U-STO Parametre Kılavuzu V1.00 TRDocument38 pagesU-STO Parametre Kılavuzu V1.00 TRSalah Salah100% (2)
- A Prototyping of 2-DOF Robot Arm Using Feedback Control SystemDocument5 pagesA Prototyping of 2-DOF Robot Arm Using Feedback Control Systembình nghuyễnNo ratings yet
- Cam Design - Pt1Document29 pagesCam Design - Pt1JC ZayasNo ratings yet
- 64c4d1712fe8320018738f98 - ## - Motion in Plane DPP - 240612 - 181305Document2 pages64c4d1712fe8320018738f98 - ## - Motion in Plane DPP - 240612 - 181305mr.physics.indiaNo ratings yet
- Modelling and Simulation of Vehicle Windshield Wiper System Using H Loop Shaping and Robust Pole Placement ControllersDocument9 pagesModelling and Simulation of Vehicle Windshield Wiper System Using H Loop Shaping and Robust Pole Placement ControllersAEMIRO BAYEHNo ratings yet
- Andy Prabowo: YOGYAKARTA, 26-27 OCTOBER 2016Document17 pagesAndy Prabowo: YOGYAKARTA, 26-27 OCTOBER 2016Ahmad Solihin AnsariNo ratings yet
- Cryogenic Nano-Actuator: ProceedingsDocument14 pagesCryogenic Nano-Actuator: ProceedingsAmirNo ratings yet
- 3D Cable-Based Parallel Robot Simulation Using PDDocument13 pages3D Cable-Based Parallel Robot Simulation Using PDRAZIQ YOUSSEFNo ratings yet
- 1 s2.0 S2212017316301839 MainDocument8 pages1 s2.0 S2212017316301839 Mainmaria graça dias portas automáticas ldaNo ratings yet
- Vector P - GP - VEC - 03Document2 pagesVector P - GP - VEC - 03Raghav MishraNo ratings yet
- 3D-Odometry For Rough Terrain - Towards Real 3D Navigation: Pierre Lamon and Roland SiegwartDocument7 pages3D-Odometry For Rough Terrain - Towards Real 3D Navigation: Pierre Lamon and Roland SiegwartTrương Đức BìnhNo ratings yet
- Exp. No: - 5 Date: Cam AnalysisDocument4 pagesExp. No: - 5 Date: Cam AnalysisLoka RakeshNo ratings yet
- Editable Engineering Problem StatementDocument7 pagesEditable Engineering Problem StatementtmamputsiNo ratings yet
- 1 s2.0 S1877705814032032 MainDocument6 pages1 s2.0 S1877705814032032 MainExequiel RemersaroNo ratings yet
- Planar Kinematics of Rigid Bodies: Gabriel AscanioDocument9 pagesPlanar Kinematics of Rigid Bodies: Gabriel AscanioDanielMalpicaCuevasNo ratings yet
- Introduction To Cam Design: Source: Norton, Design of MachineryDocument34 pagesIntroduction To Cam Design: Source: Norton, Design of MachinerySankar SubbiahNo ratings yet
- Cam Design Cam Design: Output FunctionDocument54 pagesCam Design Cam Design: Output Functionasritaip100% (1)
- Cutnell12e CH03 LectureDocument39 pagesCutnell12e CH03 Lectureari.hunterNo ratings yet
- Breadth Cam Profile Design With Oscillating Roller Follower: August 2010Document8 pagesBreadth Cam Profile Design With Oscillating Roller Follower: August 2010Tri PujiyantoNo ratings yet
- Sims PFTDocument22 pagesSims PFT187Ranjan KumarNo ratings yet
- Robot Technology: Ch.7 Trajectory Planning of RobotsDocument53 pagesRobot Technology: Ch.7 Trajectory Planning of RobotsmubarakNo ratings yet
- A Case Study: Control and Maintenance of The Tunneling Direction in Shield TunnelsDocument8 pagesA Case Study: Control and Maintenance of The Tunneling Direction in Shield Tunnelsdj_taipeiNo ratings yet
- CH 5 TRAJECTORYDocument20 pagesCH 5 TRAJECTORYJh wNo ratings yet
- 70.1 02 PDFDocument14 pages70.1 02 PDFyounesNo ratings yet
- Matter of Long-Term Deflection Control in TCVNDocument21 pagesMatter of Long-Term Deflection Control in TCVNHoang Duc LocNo ratings yet
- Rotor Dynamics 1Document14 pagesRotor Dynamics 1Marco NeveNo ratings yet
- Trigonometry Merged (With Key)Document49 pagesTrigonometry Merged (With Key)R ShyamNo ratings yet
- 10 Chapter 02 PDFDocument36 pages10 Chapter 02 PDFragab abulmagdNo ratings yet
- Chapter2.3curvilinearmotion-Class DynamicDocument20 pagesChapter2.3curvilinearmotion-Class Dynamicshakirr aimannNo ratings yet
- CamDocument28 pagesCamu1909030No ratings yet
- Lateral Stability TelehandlerDocument7 pagesLateral Stability TelehandlerReginald D'SouzaNo ratings yet
- LBC201 - Chapter 7Document29 pagesLBC201 - Chapter 7stephanieelhachemNo ratings yet
- 2022 JEE Main 1 SolutionsDocument13 pages2022 JEE Main 1 SolutionsEducation PointNo ratings yet
- Transportation DPPsDocument31 pagesTransportation DPPsAjey TripathiNo ratings yet
- CHP 4 - Rock Slope Stability AnalysisDocument109 pagesCHP 4 - Rock Slope Stability AnalysisKoh Jia JieNo ratings yet
- Project Report Introduction To Autonomous Mobile Robots MCG 5138HDocument9 pagesProject Report Introduction To Autonomous Mobile Robots MCG 5138HFalky RabbNo ratings yet
- Jurnal Inggris 9Document6 pagesJurnal Inggris 9diahNo ratings yet
- ELIMO UsersGuidev2EDocument44 pagesELIMO UsersGuidev2EChun Wai SooNo ratings yet
- Module 4 Lecture 1Document35 pagesModule 4 Lecture 1nishchaysingla1234No ratings yet
- Elevator Traffic Analysis - Passanger Elevators Option-1Document5 pagesElevator Traffic Analysis - Passanger Elevators Option-1Amit GuptaNo ratings yet
- 09 JaouenDocument20 pages09 JaouenCésarNo ratings yet
- GP2 MotionDocument10 pagesGP2 MotionKatlo MokgethiNo ratings yet
- sw7675 c006 PDFDocument25 pagessw7675 c006 PDFMeslem MazighNo ratings yet
- Lampiran - 1 Contoh Perhitungan Tebal Perkerasan Kaku Metode AASHTO 1993Document17 pagesLampiran - 1 Contoh Perhitungan Tebal Perkerasan Kaku Metode AASHTO 1993Cileungsi NarogongNo ratings yet
- WCE2010 pp1246-1250Document5 pagesWCE2010 pp1246-1250Tushar KiranNo ratings yet
- Dynamic CamDocument5 pagesDynamic CamCamilo Burbano OrtegaNo ratings yet
- R15-MayJune 2017 Kinematics of MachinesDocument2 pagesR15-MayJune 2017 Kinematics of MachinesPraveen KumarNo ratings yet
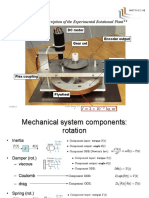
- Rotational Plant: Read The Description of The Experimental Rotational PlantDocument19 pagesRotational Plant: Read The Description of The Experimental Rotational PlantSatria WibowoNo ratings yet
- Yaw Rate and Sideslip Control Using PID Controller For Double Lane ChangingDocument5 pagesYaw Rate and Sideslip Control Using PID Controller For Double Lane ChangingAnugrah SasindranNo ratings yet
- Circular Motion _ DPP 02 (Of lec 06) __ Arjuna JEE 2024Document3 pagesCircular Motion _ DPP 02 (Of lec 06) __ Arjuna JEE 2024shreyankarwalNo ratings yet
- Major Test - 4 (Main) 2023-25 Solutions - DT. 27-04-2024Document24 pagesMajor Test - 4 (Main) 2023-25 Solutions - DT. 27-04-2024mukeshubhangi964No ratings yet
- TP12.2 - A STUDY OF TRANSIENT CORNERING PROPERTY BY USE OF AN ANALYTICAL TYRE MODEL - N-MiyashitaDocument23 pagesTP12.2 - A STUDY OF TRANSIENT CORNERING PROPERTY BY USE OF AN ANALYTICAL TYRE MODEL - N-MiyashitanaderNo ratings yet
- SMART CF+OYM (AIATS - 05) Question PartDocument6 pagesSMART CF+OYM (AIATS - 05) Question PartjothilakshmiNo ratings yet
- 2022-Mock JEE Main-8 - SolutionsDocument14 pages2022-Mock JEE Main-8 - SolutionsItZHawk GamingNo ratings yet
- Neet Prep Test SeriesDocument16 pagesNeet Prep Test SeriesADITYA KUMARDEWANGANNo ratings yet
- Remote Control System Design For The Wheeled-Robot Using Gprs/GpsDocument12 pagesRemote Control System Design For The Wheeled-Robot Using Gprs/Gpsan1088No ratings yet
- Kinematics and Dynamics Modelling of The Biped Robot: Xh. Bajrami ., A. Dermaku ., A. Shala ., R. LikajDocument5 pagesKinematics and Dynamics Modelling of The Biped Robot: Xh. Bajrami ., A. Dermaku ., A. Shala ., R. LikajTruong GiangNo ratings yet
- Modeling and Simulation of A Moving Robot Arm Mounted On WheelchairDocument5 pagesModeling and Simulation of A Moving Robot Arm Mounted On WheelchairM Rameez Ur RehmanNo ratings yet
- ELEC3201 Kinematics MockDocument13 pagesELEC3201 Kinematics Mockjiales225No ratings yet
- High-Performance Gradient Elution: The Practical Application of the Linear-Solvent-Strength ModelFrom EverandHigh-Performance Gradient Elution: The Practical Application of the Linear-Solvent-Strength ModelNo ratings yet
- 第6章習題解答Document37 pages第6章習題解答劉德信No ratings yet
- Chapter 12 勾選習題 (B)Document13 pagesChapter 12 勾選習題 (B)劉德信No ratings yet
- HW2 SolutionDocument10 pagesHW2 Solution劉德信No ratings yet
- Thermodynamics Chapter3 - 1101Document70 pagesThermodynamics Chapter3 - 1101劉德信No ratings yet
- 熱力學第一章習題Document9 pages熱力學第一章習題劉德信No ratings yet
- Thermodynamics Chapter2 - 1101Document63 pagesThermodynamics Chapter2 - 1101劉德信No ratings yet
- HW1 ProblemDocument5 pagesHW1 Problem劉德信No ratings yet
- HW1 SolutionDocument6 pagesHW1 Solution劉德信No ratings yet
- Ch1習題與參考解答Document8 pagesCh1習題與參考解答劉德信No ratings yet
- HW2 ProblemDocument6 pagesHW2 Problem劉德信No ratings yet
- HW3 SolutionDocument8 pagesHW3 Solution劉德信No ratings yet
- HW3 Solution補充說明Document5 pagesHW3 Solution補充說明劉德信No ratings yet
- HW3 ProblemDocument4 pagesHW3 Problem劉德信No ratings yet
- PPT MFG Chapter09 FinalDocument32 pagesPPT MFG Chapter09 Final劉德信No ratings yet
- HW4 SolutionDocument7 pagesHW4 Solution劉德信No ratings yet
- HW6 ProblemDocument3 pagesHW6 Problem劉德信No ratings yet
- Chapter 1b MobilityDocument85 pagesChapter 1b Mobility劉德信No ratings yet
- HW4 ProblemDocument3 pagesHW4 Problem劉德信No ratings yet
- HW6 SolutionDocument6 pagesHW6 Solution劉德信No ratings yet
- HW7 SolutionDocument5 pagesHW7 Solution劉德信No ratings yet
- HW5 SolutionDocument6 pagesHW5 Solution劉德信No ratings yet
- HW4 Solution補充說明Document2 pagesHW4 Solution補充說明劉德信No ratings yet
- 參考教材 1A-物質的定量-WangDocument65 pages參考教材 1A-物質的定量-Wang劉德信No ratings yet
- Midterm SolDocument5 pagesMidterm Sol劉德信No ratings yet
- Chapter 1 Introduction 0312edDocument5 pagesChapter 1 Introduction 0312ed劉德信No ratings yet
- Mechanisms Chap 10 - Determining The Cam Profile - Graphical Method212Document27 pagesMechanisms Chap 10 - Determining The Cam Profile - Graphical Method212劉德信No ratings yet
- HW2 SolDocument4 pagesHW2 Sol劉德信No ratings yet
- Mechanisms Chap 10 - Determining The Cam Profile - Analytical Methodv4Document28 pagesMechanisms Chap 10 - Determining The Cam Profile - Analytical Methodv4劉德信No ratings yet
- HW1 SolDocument3 pagesHW1 Sol劉德信No ratings yet
- HW3 SolDocument3 pagesHW3 Sol劉德信No ratings yet
- S1200CPU LAxesGrpCtrl DOC v11 enDocument62 pagesS1200CPU LAxesGrpCtrl DOC v11 enDavid JimenezNo ratings yet
- Tracks For Tilting Trains: European CommissionDocument95 pagesTracks For Tilting Trains: European Commissionandre_tamboNo ratings yet
- VFMC-PTC Series M 42-02-2p21 Rev d7Document320 pagesVFMC-PTC Series M 42-02-2p21 Rev d7ElputoAmo XDNo ratings yet
- Electrical Sensors and Transducers Carstens 1993 BMK PDFDocument417 pagesElectrical Sensors and Transducers Carstens 1993 BMK PDFHassan Ali100% (2)
- Arcode Param Ref ManDocument41 pagesArcode Param Ref ManAhmed67% (3)
- Acurite 3500i Manual NuevoDocument960 pagesAcurite 3500i Manual NuevoAlonso BarreraNo ratings yet
- MT43315 S 141 v5 AdvroboticsDocument916 pagesMT43315 S 141 v5 AdvroboticsHerlon Silva0% (1)
- F7 PVF PDFDocument36 pagesF7 PVF PDFReynold SuarezNo ratings yet
- 2015 - Methodology For Evaluation of Driveability Attributes in Commercial Vehicle - Lakshmanan Et AlDocument7 pages2015 - Methodology For Evaluation of Driveability Attributes in Commercial Vehicle - Lakshmanan Et AlRodrigo SantosNo ratings yet
- JERK Third Derivative of PositionDocument2 pagesJERK Third Derivative of PositionSukendi TanNo ratings yet
- Jerk (Physics) - Wikipedia, The Free EncyclopediaDocument6 pagesJerk (Physics) - Wikipedia, The Free EncyclopediaSukendi TanNo ratings yet
- Controllogix Controllers, Revision 16: Controllogix Controller Catalog NumbersDocument42 pagesControllogix Controllers, Revision 16: Controllogix Controller Catalog NumbersLeonardusNo ratings yet
- Lin Motor E400Document176 pagesLin Motor E400mrtansNo ratings yet
- Cam Design - Pt1Document29 pagesCam Design - Pt1JC ZayasNo ratings yet
- A Guide To Motion Control Technology Systems and Programming Issue - 2lowres PDFDocument68 pagesA Guide To Motion Control Technology Systems and Programming Issue - 2lowres PDFferiferiNo ratings yet
- Mechanism and PLC Design of Twin Spindle Drilling Machine - A Innovative ApproachDocument7 pagesMechanism and PLC Design of Twin Spindle Drilling Machine - A Innovative ApproachGRENZE Scientific SocietyNo ratings yet
- Biometric Non Visible Intra Signature Features in Known and Simulated SignaturesDocument18 pagesBiometric Non Visible Intra Signature Features in Known and Simulated SignaturesMarcos GianettoNo ratings yet
- Acceleration vs. Time GraphDocument16 pagesAcceleration vs. Time Graphlea pagusaraNo ratings yet
- S CurveDocument12 pagesS Curvesadiqaftab786No ratings yet
- Design / Construction Interface Manual Part 3: Guideway: Cairo, 6 of October City, MonorailDocument63 pagesDesign / Construction Interface Manual Part 3: Guideway: Cairo, 6 of October City, MonorailMohamed Adel100% (1)
- VMC Cosmos CVM Series E Catalogue - 21 - Sep - 2020 (Export Version)Document16 pagesVMC Cosmos CVM Series E Catalogue - 21 - Sep - 2020 (Export Version)Avinash RaoNo ratings yet
- Vacon NXP Lift APFIFF33 Application Manual UD01041Document76 pagesVacon NXP Lift APFIFF33 Application Manual UD01041TanuTiganuNo ratings yet
- Minimum Jerk TrajectoryDocument6 pagesMinimum Jerk Trajectoryoctavinavarro8236No ratings yet
- Setup Guide - S7-1200 V90 Pulse TrainDocument96 pagesSetup Guide - S7-1200 V90 Pulse TrainJorge_Andril_537067% (3)
- Din 7190 2001 Interference Fits Calculation and Design Rules 1Document43 pagesDin 7190 2001 Interference Fits Calculation and Design Rules 1Pau Marzo RuizNo ratings yet
- Sinamics s110 BrochureDocument8 pagesSinamics s110 BrochureMayank GuptaNo ratings yet
- Superstructure For Wheel-Rail-Traffic: Interaction Between Rail and BridgeDocument20 pagesSuperstructure For Wheel-Rail-Traffic: Interaction Between Rail and BridgeMadhurimaMitraNo ratings yet
- Be Mechanical-Engineering Semester-4 2019 May Kinematics-Of-Machinery-CbcgsDocument29 pagesBe Mechanical-Engineering Semester-4 2019 May Kinematics-Of-Machinery-CbcgsHarsh KbddhsjNo ratings yet